一种巡检机器人的视频监控摄像头的制作方法
[0001]
本实用新型涉及视频监控技术领域,特别涉及一种巡检机器人的视频监控摄像头。
背景技术:
[0002]
随着社会的发展与进步,监控系统成为我们生活中必不可少的存在,监控系统能够代替人的眼睛观察危险的地方,巡检机器人近年来一直运用在各个领域,特别是是一些高危的区域,或者人员不适合长期呆的区域,为了满足用户的使用需求,设一几款可以自动调节多角度的视频监控摄像头。
技术实现要素:
[0003]
为了克服现有技术的上述缺陷,本实用新型提供一种巡检机器人的视频监控摄像头,以解决上述背景技术中提出的问题。
[0004]
本实用新型解决现有技术中的问题所采用的技术方案为:一种巡检机器人的视频监控摄像头,包括监控摄像头、方向调节装置和安装底座;所述监控摄像头活动连接在方向调节装置上,所述安装底座设置在外置巡检机器人上;所述方向调节装置包括支撑壳体、水平转向调节装置和竖直转向调节装置,所述水平转向调节装置和竖直转向调节装置设于支撑壳体内;所述水平转向调节装置与安装底座活动连接,控制支撑壳体在安装底座处转动;所述竖直转向调节装置与监控摄像头活动连接,控制监控摄像头上下转动。
[0005]
作为本实用新型的优选方案,所述水平转向调节装置包括设于支撑壳体内部的第一驱动装置、水平驱动轴和水平转动轴;所述第一驱动装置与水平驱动轴控制连接,控制其转动,所述水平驱动轴与水平转动轴传动连接,所述水平转动轴与安装底座活动连接。
[0006]
作为本实用新型的优选方案,还包括转动连接件,所述转动连接件一端固定在监控摄像头上,所述转动连接件的另一端活动连接在方向调节装置上。
[0007]
作为本实用新型的优选方案,所述竖直转向调节装置包括设于支撑壳体内部的第二驱动装置、竖直驱动轴和竖直转动轴;所述第二驱动装置与竖直驱动轴连接,控制其转动,所述竖直驱动轴与竖直转动轴传动连接,所述竖直转动轴两端与转动连接件固定连接。
[0008]
作为本实用新型的优选方案,所述第一驱动装置的转动轴安装有第一主动轮,所述水平驱动轴上安装有第一从动轮,所述第一主动轮与第一从动轮之间通过传动带连接。
[0009]
作为本实用新型的优选方案,所述第二驱动装置的转动轴与竖直驱动轴连接,所述竖直转动轴上设有与所述竖直驱动轴传动连接的第二从动轮。
[0010]
与现有技术相比,本实用新型具有以下技术效果:
[0011]
本申请的一种巡检机器人的视频监控摄像头,该视频监控摄像头可实现水平方向的转动和竖直方向的转动,通过在外置的巡检机器人的带动下可实现无人操作下的视频监控摄像头。
附图说明
[0012]
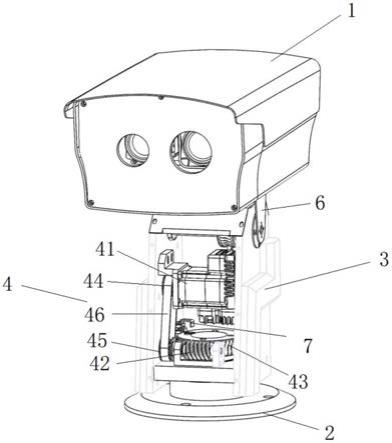
图1是本实用新型中一种巡检机器人的视频监控摄像头方向一的结构图;
[0013]
图2是本实用新型中一种巡检机器人的视频监控摄像头方向二的结构图。
[0014]
附图标记:1、监控摄像头;2、安装底座;3、支撑壳体;4、水平转向调节装置;5、竖直转向调节装置;6、转动连接件;7、传感器;41、第一驱动装置;42、水平驱动轴;43、水平转动轴;44、第一主动轮;45、第一从动轮;46、传动带;51、第二驱动装置;52、竖直驱动轴;53、竖直转动轴;54、第二从动轮。
具体实施方式
[0015]
下面结合附图对本实用新型的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本实用新型,但并不构成对本实用新型的限定。此外,下面所描述的本实用新型实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互组合。
[0016]
如附图1和2所示:一种巡检机器人的视频监控摄像头,包括监控摄像头1、方向调节装置和安装底座2;所述监控摄像头1活动连接在方向调节装置上,所述安装底座2设置在外置巡检机器人上;所述方向调节装置包括支撑壳体3、水平转向调节装置4和竖直转向调节装置5,所述水平转向调节装置4和竖直转向调节装置5设于支撑壳体3内;所述水平转向调节装置4与安装底座2活动连接,控制支撑壳体3在安装底座2处转动;所述竖直转向调节装置5与监控摄像头1活动连接,控制监控摄像头1上下转动。
[0017]
优选地,所述水平转向调节装置4包括设于支撑壳体3内部的第一驱动装置41、水平驱动轴42和水平转动轴43;所述第一驱动装置41与水平驱动轴42控制连接,控制其转动,所述水平驱动轴42与水平转动轴43传动连接,所述水平转动轴43与安装底座2活动连接。
[0018]
优选地,还包括转动连接件6,所述转动连接件6一端固定在监控摄像头1上,所述转动连接件6的另一端活动连接在方向调节装置上。
[0019]
优选地,所述竖直转向调节装置5包括设于支撑壳体3内部的第二驱动装置51、竖直驱动轴52和竖直转动轴53;所述第二驱动装置51与竖直驱动轴52连接,控制其转动,所述竖直驱动轴52与竖直转动轴53传动连接,所述竖直转动轴53两端与转动连接件6固定连接。
[0020]
优选地,所述第一驱动装置41的转动轴安装有第一主动轮44,所述水平驱动轴42上安装有第一从动轮45,所述第一主动轮44与第一从动轮45之间通过传动带46连接。
[0021]
优选地,所述第二驱动装置51的转动轴与竖直驱动轴52连接,所述竖直转动轴53上设有与所述竖直驱动轴52传动连接的第二从动轮54。
[0022]
此外,在水平转动轴43和竖直转动轴53处还设有传感器7,用于检测水平转动轴43和竖直转动轴53的转动距离,进而控制水平转动轴43和竖直转动轴53的转动角度。
[0023]
与现有技术相比,本实用新型具有以下技术效果:
[0024]
本申请的一种巡检机器人的视频监控摄像头1,该视频监控摄像头1可实现水平方向的转动和竖直方向的转动,通过在外置的巡检机器人的带动下可实现无人操作下的视频监控摄像头1。
[0025]
最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员
来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1