纤维阵列型范德华力吸盘的制作方法
1.本实用新型涉及吸盘技术领域,特别是涉及一种纤维阵列型范德华力吸盘。
背景技术:
2.传统的纤维阵列型范德华力吸盘(以下简称范式吸盘)存在“易抓取,难放下”的缺陷。吸盘在工作时,依靠范德华力吸附的方式,可以轻易将被吸附物体吸附,但因为范德华力吸附属于物理吸附,是存在于中性分子或原子之间的一种弱碱性的电性吸引力,常规方法无法消除吸盘与被吸附物体之间的范德华力,因此传统的范式吸盘只能够“掰下”(扳下),或利用其它结构限制被吸附物体移动,使移走吸盘的力大于吸盘与被吸附物体之间的范德华力,从而使吸盘与被吸附物体分离。
3.上述两种方法被吸附的物体均与其他物体接触并受一定的力的作用,在实际应用中,易损伤被吸附物体或受被吸附物体刚性影响,导致其应用受限。
技术实现要素:
4.本实用新型要解决的技术问题是提供一种无需借助外部力即可完成落料过程、减少被吸附物体损坏的风险、适用范围广的纤维阵列型范德华力吸盘。
5.本实用新型纤维阵列型范德华力吸盘,包括壳体,壳体内部安装有动力机构、传动机构、缓冲机构和范德华力吸附单元,
6.所述动力机构用于提供直线运动的动力;
7.所述传动机构与动力机构连接,所述传动机构用于传递动力,并且根据需求改变传递力的方向;
8.所述缓冲机构分别与传动机构和范德华力吸附单元,所述缓冲机构为弹性件,用于吸收被吸附物体与范德华力吸附单元之间的冲击力,给范德华力吸附单元提供预压力,使范德华力吸附单元能够贴合被吸附物体。
9.本实用新型纤维阵列型范德华力吸盘,其中所述壳体包括外壳和盖板,盖板安装在外壳上方。
10.本实用新型纤维阵列型范德华力吸盘,其中所述动力机构为双作用气缸,双作用气缸通过气缸支架安装在外壳内部,双作用气缸设置有能够在竖直方向进行直线往复运动的活塞杆。
11.本实用新型纤维阵列型范德华力吸盘,其中所述动力机构为液压缸、电磁铁、直线运动电机中的一种。
12.本实用新型纤维阵列型范德华力吸盘,其中所述动力机构为旋转动力系统配合尺寸轮齿条机构、凸轮机构、丝杆螺帽机构中的一种形成的组件。
13.本实用新型纤维阵列型范德华力吸盘,其中所述传动机构采用连杆机构,连杆机构对称分为两组,分别位于活塞杆两侧。
14.本实用新型纤维阵列型范德华力吸盘,其中所述连杆机构包括第一连杆,第一连
杆一端与活塞杆固定连接,另一端与第二连杆一端铰接,第二连杆另一端与第三连杆铰接,第三连杆的另一端固定在外壳侧壁上。
15.本实用新型纤维阵列型范德华力吸盘,其中所述缓冲机构选用弹簧,所述弹簧为偶数个。
16.本实用新型纤维阵列型范德华力吸盘,其中所述缓冲机构的一端安装在传动机构上,另一端安装在范德华力吸附单元的吸盘上。
17.本实用新型纤维阵列型范德华力吸盘与现有技术不同之处在于,本实用新型纤维阵列型范德华力吸盘在工作时,被吸附的物体完成“落料”无需借助外部限制移动或收到外部力,减少了被吸附物体损坏的风险,实际生产过程中良品率提高;设备对被吸附物体的刚性需求较低,因此适用于更广泛的工况下,能够实现多种工件的“自落料”;同时,设备中设置的缓冲机构能够吸附冲击以及提供预压力,协助范德华力吸附单元实现“自落料”。
18.下面结合附图对本实用新型的纤维阵列型范德华力吸盘作进一步说明。
附图说明
19.图1为本实用新型纤维阵列型范德华力吸盘的立体图;
20.图2为本实用新型纤维阵列型范德华力吸盘的主视图;
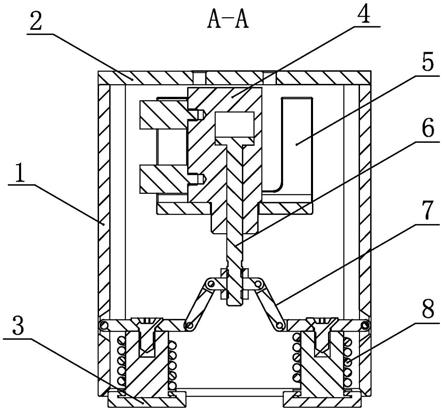
21.图3为图2中范德华力吸附单元位于吸附状态下的a
‑
a向剖视图;
22.图4为图2中范德华力吸附单元位于落料状态下的a
‑
a向剖视图;
23.图5为本实用新型纤维阵列型范德华力吸盘处于吸附状态下的结构示意图;
24.图6为本实用新型纤维阵列型范德华力吸盘处于落料状态下的结构示意图;
25.图中标记示意为:1
‑
外壳;2
‑
盖板;3
‑
范德华力吸附单元;4
‑
双作用气缸;5
‑
气缸支架;6
‑
活塞杆;7
‑
连杆机构;8
‑
弹簧。
具体实施方式
26.以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
27.如图1和图2所示,本实用新型纤维阵列型范德华力吸盘包括壳体,壳体包括外壳1和盖板2,盖板2安装在外壳1上方,盖板2和外壳1共同围成外部的壳体将壳体内部的机构包裹起来。
28.如图3和图4所示,壳体内部安装有动力机构、传动机构、缓冲机构和范德华力吸附单元3。
29.动力机构用于产生直线运动的动力,在本实施例中,动力机构为双作用气缸4。双作用气缸4通过气缸支架5安装在外壳1内部,双作用气缸4设置有能够在竖直方向进行直线往复运动的活塞杆6。在其他实施例中,动力机构也可以是液压缸、电磁铁、直线运动电机等直接产生直线运动的组件,以及旋转动力系统配合尺寸轮齿条机构、凸轮机构、丝杆螺帽机构等间接产生直线运动的组件。
30.传动机构用于传动动力,并且根据需求改变传递力的方向,提供能够克服范德华力的力。在本实施例中,传动机构采用连杆机构7,连杆机构7对称分为两组,分别位于活塞杆6两侧。连杆机构7包括第一连杆,第一连杆一端与活塞杆6固定连接,另一端与第二连杆一端铰接,第二连杆另一端与第三连杆铰接,第三连杆的另一端固定在外壳1侧壁上。当双
作用气缸4驱动活塞杆6沿竖直方向运动时,活塞杆6带动第一连杆运动。第二连杆的两端都可以活动,第二连杆会在第一连杆与第二连杆铰接端的带动下向上运动。第二连杆与第三连杆的铰接端带动第三连杆向上运动,由于第三连杆另一端与外壳1侧壁固定安装,第三连杆会以固定端为轴向斜上方向摆动。
31.缓冲机构设置在传动机构与范德华力吸附单元3之间,用于在吸盘即将要进行吸附时,吸收被吸附物体与范德华力吸附单元3之间的冲击力,提供给范德华力吸附单元3正常工作的预压力,也具有辅助范德华力吸附单元3贴合被吸附物体的作用。在本实施例中,缓冲机构选用弹簧8。缓冲机构与传动机构一样分为对称的两组,两组弹簧8的一端分别安装在传动机构的第三连杆上,另一端安装在范德华力吸附单元3的吸盘上。弹簧8需要成对设置,其总数为偶数个。当活塞杆6上移,连杆机构7在活塞杆6的带动下发生位移,连杆机构7中的第三连杆带动弹簧8,弹簧8带动范德华力吸附单元3发生倾斜,完成自落料。
32.如图3和图5所示,本实用新型纤维阵列型范德华力吸盘在初始阶段成对的范德华力吸附单元3呈同一平面或平行态对工件进行吸附;如图4和图6所示,在进行“落料”时,通过动力机构带动传动机构和缓冲机构动作,使弹簧8带动范德华力吸附单元3发生倾斜,两侧的范德华力吸附单元3分别向内侧的向上方向倾斜,工件与吸附单元的吸盘自动分离,从而实现在不依托外部限制或被吸附物体不受外部力的情况下,完成“自落料”。
33.本实用新型纤维阵列型范德华力吸盘在工作时,被吸附的物体完成“落料”无需借助外部限制移动或收到外部力,减少了被吸附物体损坏的风险,实际生产过程中良品率提高;设备对被吸附物体的刚性需求较低,因此适用于更广泛的工况下,能够实现多种工件的“自落料”;同时,设备中设置的缓冲机构能够吸附冲击以及提供预压力,协助范德华力吸附单元实现“自落料”。
34.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1