管道探测机器人的制作方法
1.本实用新型涉及管道检测技术领域,尤其涉及一种管道探测机器人。
背景技术:
2.城市下水管道的管道一般采用钢筋混凝土浇筑而成,由于长时间经过水流冲刷和浸泡,往往会存在一定的破损、腐蚀等现象,管道的管壁强度下降。在现有的管道状态检测过程中,一种检测手段是通过cctv(closed circuit television)检测设备,进入待检测管道中,通过拍摄的图像,获得管道内壁状态,然而采用这种检测手段时,往往需要依靠目视结果来对管道内壁强度进行判断,评估结果往往依靠个人经验进行判断,因此对管道内壁强度的判断没有足够的科学依据。另一种检测手段是采用雷达或者声呐设备来对管道的管壁进行扫描,从而获得管壁表面的结构数据,然而,管壁表面的结构数据不能代表管道整体混凝土的强度数据,因此采用这种检测手段时,无法对下水管道的混凝土强度进行准确有效的检测。由此可知,现有技术中针对管道检测往往只能通过cctv摄像头或声呐设备来探测管道内壁的表面图像信息,因此无法对管道混凝土的整体强度进行直观、有效的评估。
技术实现要素:
3.本实用新型旨在至少解决现有技术中存在的技术问题之一。
4.为此,本实用新型提出一种管道探测机器人,能够更加直观的获取管道管壁的强度信息,有效提高了管道检测的准确性。
5.根据本实用新型实施例的管道探测机器人,包括行走装置、机器人主体、抬升装置、安装平台以及弹性波探测装置,所述机器人主体安装在所述行走装置上,所述抬升装置安装在所述机器人主体上,所述安装平台安装在所述抬升装置上,所述弹性波探测装置安装于所述安装平台的上表面;所述弹性波探测装置包括弹性波发生器、第一弹性波接收器和第二弹性波接收器,所述弹性波发生器、所述第一弹性波接收器和所述第二弹性波接收器沿所述安装平台的长度延伸方向依次间隔设置。
6.根据本实用新型的一个实施例,所述安装平台的上表面还设有鱼眼镜头,所述鱼眼镜头设置于所述第一弹性波接收器与所述第二弹性波接收器之间。
7.根据本实用新型的一个实施例,所述抬升装置的前侧设有多个照明灯,各所述照明灯均安装在照明灯安装座上,所述照明灯安装座通过连接支架与所述安装平台相连。
8.根据本实用新型的一个实施例,所述照明灯安装座上还安装有摄像头。
9.根据本实用新型的一个实施例,所述安装平台包括平台板和安装框架,所述弹性波探测装置安装于所述平台板的上表面,所述平台板的下表面与所述安装框架上端相连;所述抬升装置的上端与所述安装框架可拆卸连接。
10.根据本实用新型的一个实施例,所述抬升装置包括对称设置的两个抬升组件,两个所述抬升组件相互平行,各所述抬升组件均包括交叉转动连接的第一抬升杆和第二抬升杆,所述第一抬升杆的下端与所述机器人主体转动连接,所述安装框架上设有限制所述第
一抬升杆的上端沿水平向进行往复运动的第一限位件;所述第二抬升杆的上端与所述安装框架转动连接,所述机器人主体上设有限制所述第二抬升杆的下端沿水平向进行往复运动的第二限位件。
11.根据本实用新型的一个实施例,所述第一限位件包括第一限位板以及设置在所述第一限位板上的第一限位槽,所述第一限位槽沿水平方向延伸设置,所述第一抬升杆的上端与所述第一限位槽滑动配合;所述第二限位件包括第二限位板以及设置在所述第二限位板上的第二限位槽,所述第二限位槽沿水平方向延伸设置,且所述第二限位槽与所述第一限位槽相互平行,所述第二抬升杆的下端与所述第二限位槽滑动配合。
12.根据本实用新型的一个实施例,所述抬升装置还包括两个直线驱动机构,两个所述直线驱动机构分别与两个所述第二抬升杆的下端对应驱动连接。
13.根据本实用新型的一个实施例,所述行走装置包括轮架,所述轮架上分别安装有主动轮和从动轮,所述轮架上还安装有与所述主动轮驱动连接的行走驱动机构;所述机器人主体安装在所述轮架上。
14.根据本实用新型的一个实施例,所述机器人主体上还设有信号收发装置,所述弹性波发生器、所述第一弹性波接收器、所述第二弹性波接收器、所述鱼眼镜头和所述摄像头分别通过线缆与所述信号收发装置相连,所述信号收发装置通过线缆与终端设备相连。
15.本实用新型实施例中的上述一个或多个技术方案,至少具有如下技术效果之一:
16.本实用新型实施例的管道探测机器人,通过设置行走装置实现管道探测机器人在管道内的移动,通过在机器人主体上设置抬升装置,能够带动安装平台进行抬升运动,进而使得搭载在抬升装置上的弹性波探测装置能够与管道内壁接触,其中弹性波探测装置包括依次设置的弹性波发生器、第一弹性波接收器和第二弹性波接收器,当弹性波发生器、第一弹性波接收器和第二弹性波接收器分别与管道内壁接触时,弹性波发生器能够向管道内壁发射弹性波信号,第一弹性波接收器和第二弹性波接收器能够先后接收到沿管道内壁传播的弹性波信号,通过采集第一弹性波接收器和第二弹性波接收器接收弹性波的时间差,以及第一弹性波接收器和第二弹性波接收器之间的间距,能够获取弹性波在第一弹性波接收器和第二弹性波接收器之间的管壁内部传输速度,进而获得管壁混凝土强度信息,相较于现有技术中通过cctv摄像头或声呐设备来探测管道内壁的表面图像信息的方式,采用本实用新型实施例的管道探测机器人,能够更加直观的获取管道管壁的强度信息,有效提高了管道检测的准确性。
17.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
18.图1是本实用新型实施例提供的管道探测机器人的主视结构图;
19.图2是本实用新型实施例提供的管道探测机器人的俯视结构图;
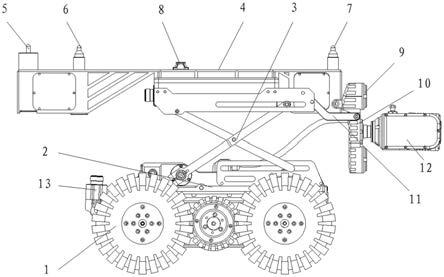
20.图3是本实用新型实施例提供的管道探测机器人的第一轴测示意图;
21.图4是本实用新型实施例提供的管道探测机器人的第二轴测示意图。
22.附图标记:
23.1:行走装置;101:轮架;102:主动轮;103:从动轮;
24.2:机器人主体;
25.3:抬升装置;301:第一抬升杆;302:第二抬升杆;303:第一限位板;304:第一限位槽;305:第二限位板;306:第二限位槽;
26.4:安装平台;401:平台板;402:安装框架;
27.5:弹性波发生器;6:第一弹性波接收器;7:第二弹性波接收器;8:鱼眼镜头;9:照明灯;10:照明灯安装座;11:连接支架;12:摄像头;13:线缆接口。
具体实施方式
28.下面结合附图和实施例对本实用新型的实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不能用来限制本实用新型的范围。
29.在本实用新型实施例的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型实施例的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
30.在本实用新型实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型实施例中的具体含义。
31.在本实用新型实施例中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
32.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型实施例的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
33.如图1至图4所示,本实用新型实施例提供一种管道探测机器人,包括行走装置1、机器人主体2、抬升装置3、安装平台4以及弹性波探测装置,机器人主体2安装在行走装置1上,抬升装置3安装在机器人主体2上,安装平台4安装在抬升装置3上,弹性波探测装置安装于安装平台4的上表面。也即,通过行走装置1能够带动管道探测机器人在管道内部行驶,通过机器人主体2用于支撑装载抬升装置3、安装平台4以及弹性波探测装置,通过抬升装置3
能够带动安装平台4以及弹性波探测装置进行抬升或下降运动,进而实现弹性波探测装置与管道内壁之间的接触或分离。
34.其中,弹性波探测装置包括弹性波发生器5、第一弹性波接收器6和第二弹性波接收器7,弹性波发生器5、第一弹性波接收器6和第二弹性波接收器7沿安装平台4的长度延伸方向依次间隔设置。其中,安装平台4的长度延伸方向即为管道探测机器人在管道内的移动方向,也即,弹性波发生器5、第一弹性波接收器6和第二弹性波接收器7从前至后依次间隔设置。
35.需要对管道进行检测时,将抬升装置3升起,以使弹性波发生器5、第一弹性波接收器6和第二弹性波接收器7分别与管道内壁接触,弹性波发生器5开始向管道内壁发射弹性波信号,弹性波信号沿管道内壁传播时,第一弹性波接收器6和第二弹性波接收器7能够先后接收到沿管道内壁传播的弹性波信号,通过采集第一弹性波接收器6和第二弹性波接收器7接收弹性波的时间差,同时结合第一弹性波接收器6和第二弹性波接收器7之间的间距,能够获取弹性波在第一弹性波接收器6和第二弹性波接收器7之间的管壁内部传输速度,根据弹性波在待检测管道段的管壁内的传播速度与管壁内混凝土的强度之间的映射关系,计算得到管道段的管壁混凝土强度。
36.由此,相较于现有技术中通过cctv摄像头或声呐设备来探测管道内壁的表面图像信息的方式,采用本实用新型实施例的管道探测机器人,能够更加直观的获取管道管壁的强度信息,有效提高了管道检测的准确性。
37.在本实用新型的一些实施例中,在安装平台4的上表面还设有鱼眼镜头8,该鱼眼镜头8设置于第一弹性波接收器6与第二弹性波接收器7之间。通过设置鱼眼镜头8,用于观察第一弹性波接收器6与第二弹性波接收器7是否与管道管壁接触,进而确保管道检测能够顺利进行。
38.在本实用新型的一些实施例中,抬升装置3的前侧设有多个照明灯9,各照明灯9均安装在照明灯安装座10上,该照明灯安装座10通过连接支架11与安装平台4相连。通过设置多个照明灯9,能够在管道内黑暗的环境下进行照明,进而便于观察管道内部的环境以及管道探测机器人在管道内的运行状况。
39.在本实用新型的一些实施例中,在照明灯安装座10上还安装有摄像头12。通过设置摄像头12,能够获取管道探测机器人行驶前方的图像信息,进而便于掌握管道内部的环境。
40.在本实用新型的一些实施例中,安装平台4包括平台板401和安装框架402,其中,弹性波发生器5、第一弹性波接收器6和第二弹性波接收器7均安装于平台板401的上表面,平台板401的下表面与安装框架402上端相连。也即,安装框架402用于支撑平台板401,平台板401用于搭载弹性波发生器5、第一弹性波接收器6和第二弹性波接收器7。
41.具体来说,可以将抬升装置3的上端与安装框架402进行可拆卸连接,从而便于实现抬升装置3与安装平台4之间的装卸操作。其中,抬升装置3与安装框架402之间可以通过连接件进行可拆卸连接,根据实际使用需求,连接件可以采用螺栓、螺钉或卡扣。应当理解的是,连接件的形式并不局限于如上所述的类型。
42.在本实用新型的一些实施例中,抬升装置3包括对称设置的两个抬升组件,两个抬升组件相互平行,各抬升组件均包括交叉转动连接的第一抬升杆301和第二抬升杆302,第
一抬升杆301的下端与机器人主体2转动连接,安装框架402上设有限制第一抬升杆301的上端沿水平向进行往复运动的第一限位件。第二抬升杆302的上端与安装框架402转动连接,在机器人主体2上设有限制第二抬升杆302的下端沿水平向进行往复运动的第二限位件。通过设置两个对称且平行的抬升组件,能够使抬升装置3的抬升和下降动作更加平稳、可靠。
43.具体来说,第一限位件包括第一限位板303以及设置在第一限位板303上的第一限位槽304,第一限位槽304沿水平方向延伸设置,第一抬升杆301的上端与第一限位槽304滑动配合。第二限位件包括第二限位板305以及设置在第二限位板305上的第二限位槽306,第二限位槽306沿水平方向延伸设置,且第二限位槽306与第一限位槽304相互平行,第二抬升杆302的下端与第二限位槽306滑动配合。也即,通过第一抬升杆301的上端与第一限位槽304之间的滑动配合方式,能够使第一抬升杆301的上端沿第一限位槽304进行水平向运动,从而调整第一抬升杆301的上端与第二抬升杆302的上端之间的距离,通过第二抬升杆302的下端与第二限位槽306之间的滑动配合方式,能够使第二抬升杆302的下端沿第二限位槽306进行水平向运动,从而调整第一抬升杆301的下端与第二抬升杆302的下端之间的距离,进而实现对第一抬升杆301的上端以及第二抬升杆302的上端的高度调整,进而实现抬升装置3的抬升和下降动作。
44.具体来说,该抬升装置3还包括两个直线驱动机构(图中未示),两个直线驱动机构分别与两个第二抬升杆302的下端对应驱动连接。通过两个直线驱动机构能够分别驱动两个第二抬升杆302的下端沿对应的第二限位槽306进行水平向的往复运动。
45.其中,根据实际使用需求,直线驱动机构可以采用气缸、油缸、电液推杆或直线电机。
46.在本实用新型的一些实施例中,根据实际使用需求,行走装置1可以采用轮胎式结构、履带式结构或滚筒式结构。
47.在一种具体实施例中,行走装置1采用轮胎式结构,该行走装置1具体包括轮架101,轮架101上分别安装有主动轮102和从动轮103,轮架101上还安装有与主动轮102驱动连接的行走驱动机构(图中未示)。其中,机器人主体2安装在轮架101上。也即,通过行走驱动机构能够驱动主动轮102转动,进而通过主动轮102带动从动轮103转动,进而通过轮架101带动机器人主体2移动,进而实现管道探测机器人在管道内的行驶。
48.在本实用新型的一些实施例中,机器人主体2上还设有信号收发装置,弹性波发生器5、第一弹性波接收器6、第二弹性波接收器7、鱼眼镜头8、摄像头12、各照明灯9、各直线驱动机构以及行走驱动机构分别通过线缆与该信号收发装置的线缆接口13相连,该信号收发装置的线缆接口13能够通过线缆与终端设备相连。也即,终端设备能够向信号收发装置发送控制信号,从而分别控制弹性波发生器5、第一弹性波接收器6、第二弹性波接收器7、鱼眼镜头8、摄像头12、各照明灯9、各直线驱动机构以及行走驱动机构进行工作。第一弹性波接收器6和第二弹性波接收器7分别接收弹性波信号的时间,以及鱼眼镜头8和摄像头12分别采集的图像信息,能够分别传送至信号收发装置13,然后再通过信号收发装置13发送至终端设备进行数据处理。
49.本实用新型实施例的管道探测机器人的工作原理如下:
50.检测机器人在管道中行驶,当行驶到待检测的管道段时,抬升装置3升起,使得弹性波发生器5、第一弹性波接收器6、第二弹性波接收器7分别与管道内壁接触,弹性波发生
器5开始向管道内壁发射弹性波信号,弹性波信号沿管道内壁传播时,第一弹性波接收器6首先接收到弹性波信号,并记录接收到信号的时间t1,其后,第二弹性波接收器7接收到弹性波信号,并记录接收到信号的时间t2,从而获得弹性波在第一弹性波接收器6与第二弹性波接收器7之间的传播时间(t2
‑
t1),再根据第一弹性波接收器6与第二弹性波接收器7之间的距离l,计算获得弹性波的传播速度s。最后根据弹性波的传播速度s与管壁内混凝土的强度之间的映射关系,计算得到管道内壁混凝土强度。
51.其中,对管道内壁混凝土强度进行计算的方法包括:标准曲线法、修正系数法、水泥净浆波速换算法和水泥砂浆波速换算法。
52.需要说明的是,上述用于计算弹性波的传播速度的方法以及对管道内壁混凝土强度进行计算的方法均属于本领域的常规数据处理方法,因此不涉及对方法本身的改进。
53.综上所述,本实用新型实施例的管道探测机器人,通过采集第一弹性波接收器6和第二弹性波接收器7接收弹性波的时间差,以及第一弹性波接收器6和第二弹性波接收器7之间的间距,能够获取弹性波在第一弹性波接收器6和第二弹性波接收器7之间的管壁内部传输速度,进而能够获得管壁混凝土强度信息,相较于现有技术中通过cctv摄像头或声呐设备来探测管道内壁的表面图像信息的方式,采用本实用新型实施例的管道探测机器人,能够更加直观的获取管道管壁的强度信息,有效提高了管道检测的准确性。
54.以上实施方式仅用于说明本实用新型,而非对本实用新型的限制。尽管参照实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,对本实用新型的技术方案进行各种组合、修改或者等同替换,都不脱离本实用新型技术方案的精神和范围,均应涵盖在本实用新型的权利要求范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1