作业车辆的制作方法
1.本发明涉及拖拉机等作业车辆。
背景技术:
2.以往,作为搭载有无级变速装置的拖拉机,已知有专利文献1所示的拖拉机。专利文献1所公开的拖拉机具有:静液压式的无级变速部,具有液压泵以及液压马达,被输入发动机的动力,将被输入的动力变速为无级的旋转速度的动力而输出;以及复合行星传动部,合成被输入的变速输出和发动机动力并输出合成动力。
3.现有技术文献
4.专利文献
5.专利文献1:日本国公开专利公报“日本特开2019-95058号公报”
技术实现要素:
6.发明所要解决的问题
7.在专利文献1所示的拖拉机中,未考虑对该拖拉机进行了制动的情况下的复合行星传动部的连接,存在制动时的拖拉机的举动(行驶)等发生变化的情况。
8.因此,本发明是鉴于上述问题点而完成的,目的在于提供一种具备无级变速装置的作业车辆,能够提高制动起步时的行驶性。
9.解决问题的技术手段
10.本发明的用于解决上述技术问题的技术手段的特征在于以下所示的方面。
11.作业车辆具有:车体,设置有行驶装置;无级变速装置,具备:液压泵,具有根据斜板角度来变更输出的斜板;以及行驶马达,具有旋转速度根据所述液压泵的输出而变化的输出轴,且所述输出轴的动力能够向所述行驶装置传递;行驶操作构件,能够操作到使所述车体前进的前进位置、使所述车体后退的后退位置、使所述车体不切换为前进和后退中的任一个的中立位置;离合器机构,基于所述行驶操作构件的前进位置、后退位置以及中立位置的操作,进行由所述无级变速装置变速后的驱动力的切换,制动装置,进行所述行驶装置的制动;制动操作构件,进行所述制动装置的制动的操作;以及控制装置,根据所述制动操作构件的操作量来变更在将所述行驶操作构件保持在所述中立位置时的从所述无级变速装置输出的驱动力即中立目标值。
12.所述控制装置随着所述操作量增加而减小所述中立目标值,随着所述操作量减少而增大所述中立目标值。
13.所述控制装置具有:目标运算部,对将所述行驶操作构件从中立位置向前进位置切换而使所述车体前进时的从所述无级变速装置输出的前进目标输出值、以及将所述行驶操作构件从中立位置向后退位置切换而使所述车体后退时的从所述无级变速装置输出的后退目标输出值进行运算;以及输出设定部,基于所述制动操作构件的所述操作量、前进目标输出值以及所述后退目标输出值来设定所述中立目标值。
14.所述输出设定部基于未进行所述制动操作构件的操作而向所述前进位置切换时的前进目标输出值即第一目标值和未进行所述制动操作构件的操作而向所述后退位置切换时的后退目标输出值即第二目标值来设定中立目标值。
15.所述输出设定部将所述第一目标值和所述第二目标值的中间值设定为所述中立目标值。
16.所述输出设定部设定所述行驶马达的旋转速度,作为从所述无级变速装置输出的驱动力。
17.作业车辆具有:第一行星齿轮变速装置,将由所述无级变速装置变速后的驱动力向高速侧变速;以及第二行星齿轮变速装置,与第一行星齿轮变速装置相比将由所述无级变速装置变速后的驱动力向低速侧变速,所述离合器机构具有:第一离合器装置,能够在将所述第一行星齿轮变速装置的驱动力向前进侧传递的连接状态和不向所述前进侧传递的切断状态之间切换;以及第二离合器装置,能够在将所述第二行星齿轮变速装置的驱动力向所述前进侧传递的连接状态、将所述第二行星齿轮变速装置的驱动力向后退侧传递的连接状态、以及不向所述前进侧和后退侧中的任一个传递的切断状态之间切换。
18.发明效果
19.根据本发明,在具备无级变速装置的作业车辆中,能够提高制动起步时的行驶性。
附图说明
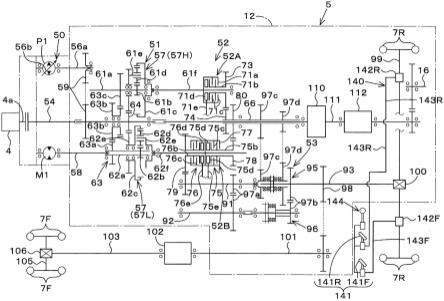
20.图1是表示变速装置的整体的图。
21.图2是表示控制框图的图。
22.图3是表示控制映射的一例的图。
23.图4a是变速箱的立体图。
24.图4b是变速装置的立体图。
25.图5a是表示控制装置的动作流程的图。
26.图5b是表示与图5a不同的控制装置的动作流程的图。
27.图6是表示拖拉机的整体的图。
具体实施方式
28.以下,参照附图对本发明的实施方式进行说明。
29.图6是表示作为作业车辆的一例的拖拉机1。虽然以拖拉机1为例进行说明,但作业车辆不限于拖拉机,可以是插秧机等农业机械。
30.如图6所示,拖拉机1具备具有行驶装置7的车体3、原动机4、变速装置5、以及转向装置29。行驶装置7是具有前轮7f和后轮7r的装置。前轮7f可以是轮胎型也可以是履带型。另外,后轮7r同样可以是轮胎型也可以是履带型。原动机4是汽油发动机、柴油发动机等内燃机。在本实施方式中,原动机4是柴油发动机。
31.变速装置5能够通过变速来切换行驶装置7的推进力,并且能够进行行驶装置7的前进、后退的切换。在车体3内设置有驾驶室9,在该驾驶室9内设置有驾驶席10。
32.另外,在车体3的后部设置有升降装置8。在升降装置8上能够装卸作业装置。另外,升降装置8能够升降所安装的作业装置。作业装置是进行耕耘的耕耘装置、散布肥料的肥料
散布装置、散布农药的农药散布装置、进行收获的收获装置、进行牧草等的收割的收割装置、进行牧草等的扩散的扩散装置、进行牧草等的集草的集草装置、进行牧草等的成形的成形装置等。
33.如图1所示,变速装置5是能够对来自原动机4的驱动力进行变速并向行驶装置7传递的装置。变速装置5具有无级变速装置50、行星齿轮变速机构51、离合器机构52、以及副变速机构53。变速装置5容纳在变速箱12中。如图4a所示,变速箱12是具有空间的立方体形状,包括:上壁12a;下壁12b,与上壁12a分离地设置;左侧壁12c,连结上壁12a和下壁12b的左侧;右侧壁12d,连结上壁12a和下壁12b的右侧;前壁12e,连结上壁12a、左侧壁12c以及右侧壁12d的前侧;后壁12f,连结上壁12a、左侧壁12c以及右侧壁12d的后侧。如图4a和图4b所示,无级变速装置50、行星齿轮变速机构51、离合器机构52以及副变速机构53容纳在由上壁12a、下壁12b、左侧壁12c、右侧壁12d、前壁12e以及后壁12f包围的空间内。变速箱12也可以是连结了分割成多个的分割体的结构,没有被限定。
34.在变速箱12内填充有用于润滑变速装置5(无级变速装置50、行星齿轮变速机构51、离合器机构52以及副变速机构53)的润滑油。
35.无级变速装置50是将从原动机4传递的驱动力无级地变速的装置。在本实施方式中,无级变速装置50是静液压式的无级变速装置50。
36.对从原动机4的输出轴(曲柄轴)4a向主轴(推进轴)54传递的驱动力进行变更。如图1和图2所示,无级变速装置50具有液压泵p1和行驶马达m1。液压泵p1和行驶马达m1通过动作油流动的油路(循环油路)55连接。液压泵p1具有输入轴56a和斜板56b。液压泵p1通过向输入轴56a传递的动力驱动,并能够根据被摆动自如地支承的斜板56b的角度(斜板角度)来变更输出(动作油的喷出量(流量)、压力)。
37.行驶马达m1具有输出轴58。输出轴58的旋转速度根据液压泵p1的输出(动作油的流量、压力)而变化。输出轴58的动力向行星齿轮变速机构51等传递之后,向行驶装置7传递。
38.具体而言,如图1所示,液压泵p1的输入轴56a与具有随着主轴(推进轴)54的旋转而旋转的齿轮等的驱动齿轮机构59连接,经由驱动齿轮机构59被传递主轴(推进轴)54的动力。根据液压泵p1的斜板角度而变更输出,从而变更行驶马达m1的输出轴58的旋转速度。
39.行星齿轮变速机构51是对由无级变速装置50变速后的驱动力进一步进行变速的装置,具有多个行星齿轮变速装置57。在本实施方式中,多个行星齿轮变速装置57包括第一行星齿轮变速装置57h和第二行星齿轮变速装置57l。第一行星齿轮变速装置57h是传递高速的驱动力的行星齿轮变速装置,第二行星齿轮变速装置57l相比第一行星齿轮变速装置57h是传递低速的驱动力的行星齿轮变速装置。
40.第一行星齿轮变速装置57h具有第一输入轴61a、第一太阳齿轮61b、第一齿圈61c、多个第一行星齿轮61d、第一行星架61e、以及第一输出轴61f。第一输入轴61a被旋转自如地支承,被传递由无级变速装置50变速后的驱动力。第一太阳齿轮61b是随着第一输入轴61a的旋转而旋转的齿轮。第一齿圈61c与第一太阳齿轮61b配置在同一轴上,被旋转自如地支承。在第一齿圈61c与第一太阳齿轮61b之间配置有多个第一行星齿轮61d。多个第一行星齿轮61d被第一行星架61e支承。第一输出轴61f以随着第一齿圈61c的旋转而旋转的方式被支承。
41.第二行星齿轮变速装置57l具有第二输入轴62a、第二太阳齿轮62b、第二齿圈62c、多个第二行星齿轮62d、第二行星架62e、以及第二输出轴62f。第二输入轴62a被旋转自如地支承,被传递由无级变速装置50变速后的驱动力。第二太阳齿轮62b是随着第二输入轴62a的旋转而旋转的齿轮。第二齿圈62c与第二太阳齿轮62b配置在同一轴上,被旋转自如地支承。在第二齿圈62c与第二太阳齿轮62b之间配置有多个第二行星齿轮62d。多个第二行星齿轮62d被第二行星架62e支承。第二输出轴62f以随着第二行星架62e的旋转而旋转的方式被支承。
42.另外,无级变速装置50的输出侧即行驶马达m1的输出轴58的动力经由第二行星齿轮变速装置57l的第二输入轴62a向第二行星齿轮变速装置57l传递。另外,行驶马达m1的输出轴58的动力通过与第二行星齿轮变速装置57l的第二输入轴62a连结的动力传递机构63,向第一行星齿轮变速装置57h传递。动力传递机构63包括:随着第二输入轴62a的旋转而旋转的齿轮63a、与齿轮63a啮合的齿轮63b、设置于第一行星齿轮变速装置57h的第一输入轴61a的齿轮63c。齿轮63b与齿轮63c啮合。
43.因此,行驶马达m1的输出轴58的动力经由第二输入轴62a、齿轮63a、齿轮63b以及齿轮63c向第一行星齿轮变速装置57h的第一输入轴61a传递。
44.另外,设置于第一行星齿轮变速装置57h的第二齿圈62c的齿轮与设置于主轴(推进轴)54的齿轮64啮合,齿轮64与设置于第一行星架61e的齿轮啮合。
45.以上,根据无级变速装置50以及行星齿轮变速机构51,能够在从无级变速装置50输出的驱动力向第一行星齿轮变速装置57h输入的情况下变换为高速,在向第二行星齿轮变速装置57l输入的情况下变换为低速。
46.如图1所示,变速装置5具有离合器机构52。离合器机构52能够在将由行星齿轮变速机构51变速后的驱动力与传递轴66连接的连接状态和未与传递轴66连接的切断状态之间进行切换。离合器机构52具有第一离合器装置52a和第二离合器装置52b。第一离合器装置52a是能够将第一行星齿轮变速装置57h的驱动力向传递轴66传递的离合器。第二离合器装置52b是能够将第二行星齿轮变速装置57l的驱动力向传递轴66传递的离合器。
47.第一离合器装置52a以及第二离合器装置52b是通过动作油在连接状态和切断状态之间切换的液压离合器。
48.第一离合器装置52a具有:外壳71a,能够与第一行星齿轮变速装置57h的第一输出轴61f一体旋转;圆筒轴71b;摩擦板71c,配置于外壳71a与圆筒轴71b之间;以及按压构件71d。按压构件71d被未图示的弹簧等施力构件向远离摩擦板71c的方向施力。
49.在外壳71a内连接有用于供给/排出动作油的油路71e,当从油路71e向外壳71a侧供给动作油时,按压构件71d克服弹簧的作用力而向按压侧(连接侧)移动,从而摩擦板71c向外壳71侧压接,第一离合器装置52a成为连接状态,第一输出轴61f的动力向与圆筒轴71b一体旋转的齿轮73传递。另一方面,当从外壳71a侧向油路71e排出动作油时,按压构件71d因弹簧的作用力而向切断侧移动,从而摩擦板71c远离外壳71a侧,第一离合器装置52a成为切断状态,第一输出轴61f的动力不向齿轮73传递。
50.在传递轴66设置有与该传递轴66一体旋转的输入齿轮74,输入齿轮74与第一离合器装置52a的输出侧的齿轮(输出齿轮)73啮合,在第一离合器装置52a成为连接状态的情况下,由第一行星齿轮变速装置57h向高速侧变速后的驱动力向传递轴66传递。
51.第二离合器装置52b是用于切换前进和后退的离合器,具有前进离合器部75和后退离合器部76。前进离合器部75以及后退离合器部76具有与第二行星齿轮变速装置57l的第二输出轴62f一体旋转的外壳77。
52.前进离合器部75具有圆筒轴75b、配置于外壳77与圆筒轴75b之间的摩擦板75c、按压构件75d。按压构件75d被未图示的弹簧等施力构件向远离摩擦板75c的方向施力。
53.在前进离合器部75侧的外壳77内连接有用于供给/排出动作油的油路75e,当从油路75e向外壳77侧供给动作油时,按压构件75d克服弹簧的作用力而向按压侧(连接侧)移动,从而摩擦板75c向外壳77侧压接,前进离合器部75成为连接状态,第二输出轴62f的动力向与圆筒轴75b一体旋转的齿轮78传递。另一方面,当动作油从外壳77侧向油路75e排出时,按压构件75d因弹簧的作用力而向切断侧移动,从而摩擦板75c远离外壳77侧,前进离合器部75成为切断状态,第二输出轴62f的动力不向齿轮78传递。
54.后退离合器部76具有圆筒轴76b、配置于外壳77与圆筒轴76b之间的摩擦板76c、按压构件76d。按压构件76d被未图示的弹簧等施力构件向远离摩擦板76c的方向施力。
55.在传递轴66设置有与该传递轴66一体旋转的输入齿轮80,输入齿轮80与前进离合器部75的输出侧的齿轮(输出齿轮)78啮合,在前进离合器部75成为连接状态的情况下,由第二行星齿轮变速装置57l向低速侧变速后的驱动力向传递轴66传递。
56.在后退离合器部76侧的外壳77内连接有用于供给/排出动作油的油路76e,当动作油从油路76e向外壳77侧供给时,按压构件76d克服弹簧的作用力而向按压侧(连接侧)移动,从而摩擦板76c向外壳77侧压接,后退离合器部76成为连接状态,第二输出轴62f的动力向与圆筒轴76b一体旋转的齿轮79传递。另一方面,当从外壳77侧向油路76e排出动作油时,按压构件76d因弹簧的作用力而向切断侧移动,从而摩擦板76c远离外壳77侧,后退离合器部76成为切断状态,第二输出轴62f的动力不向齿轮79传递。
57.副变速机构53构成为具有:第一变速部95,装配在第一中间轴91与后轮驱动轴93之间;第二变速部96,与第二中间轴92装配在同轴芯上;以及传动齿轮,与第一变速部95和第二变速部96连接。副变速机构53具有第一低速传动齿轮97a、第二低速传动齿轮97b、高速传动齿轮97c、中速传动齿轮97d,能够进行高速、中速、低速三档的变速。副变速机构53的变速通过能够切换到多个位置的副变速操作构件149进行。副变速操作构件149设置在驾驶席10的周围,是能够切换到高速位置、中立位置、中速位置、中立位置、低速位置这五档的杆。在副变速操作构件149为中立位置的情况下,第一中间轴91的动力处于不向后轮驱动轴93传递的状态,即,原动机4的驱动力处于不向行驶装置7传递的状态。
58.由副变速机构53变速后的后轮驱动轴93与连结有旋转自如地支承后轮7r的后车轴99的后轮差速装置100连接,前进的传递轴66的驱动力经由副变速机构53以及后轮驱动轴93向具有后轮7r的行驶装置7传递。另外,前进的传递轴66的驱动力经由设置于后轮驱动轴93的前轮传递齿轮98向前轮传动轴101传递。在前轮传动轴101上设置有使前轮7f的旋转等变化的驱动变换离合器102,在驱动变换离合器102的输出侧连接有前轮驱动轴103。前轮驱动轴103与连结有旋转自如地支承前轮7f的前车轴105的前轮差速装置106连接,前进的传递轴66的驱动力经由副变速机构53以及后轮驱动轴93,向具有前轮7f的行驶装置7传递。此外,在驱动变换离合器102中,能够使前轮7f与后轮7r的旋转等速、设为利用前轮7f和后轮7r双方行驶的4wd(四轮驱动)、或者设仅利用后轮7r行驶的2wd(两轮驱动)。
59.在推进轴54上设置有pto离合器装置110。pto离合器装置110例如由液压离合器等构成,通过液压离合器的接合/分离而在将推进轴54的动力向pto推进轴111传递的状态(连接状态)和将推进轴54的动力不向pto推进轴111传递的状态(切断状态)之间切换。在pto推进轴111的中途部设置有对pto推进轴111的驱动力(旋转)进行变速的pto变速装置112,能够变更pto推进轴111的旋转,即,变更经由齿轮与pto推进轴111连接的pto轴16的旋转。
60.如图1所示,拖拉机1具有制动装置140。制动装置140是进行行驶装置7的制动的装置。制动装置140具有制动操作构件141、左制动装置142f、右制动装置142r。制动操作构件141是进行制动的操作的构件,是驾驶员利用手动操作的构件。
61.制动操作构件141包括左制动踏板141f和右制动踏板141r。左制动踏板141f以及右制动踏板141r摆动自如地支承于车体3等,设置于驾驶席10附近,能够由驾驶员操作。左制动装置142f以及右制动装置142r是盘型的制动装置,能够在制动的制动状态和解除制动的解除状态之间进行切换。左制动装置142f设置于后车轴99的左侧,右制动装置142r设置于后车轴99的右侧。
62.驾驶员通过操作(踩踏)左制动踏板141f,与左制动踏板141f连结的左连结构件143f向制动方向移动,能够使左制动装置142f处于制动状态。驾驶员通过操作(踩踏)右制动踏板141r,与右制动踏板141r连结的右连结构件143r向制动方向移动,能够使右制动装置142r处于制动状态。此外,在左制动踏板141f和右制动踏板141r卡合脱离自如地(钩挂于左制动踏板141f和右制动踏板141r而连结左制动踏板141f和右制动踏板141r的连结状态、以及不进行左制动踏板141f和右制动踏板141r的钩挂而不连结的非连结状态)设置有连结二者的连结构件,在通过连结构件连结左制动踏板141f和右制动踏板141r的情况下,通过踩踏左制动踏板141f以及右制动踏板141r中的任一个,能够同时制动左制动装置142f和右制动装置142r,通过解除左制动踏板141f以及右制动踏板141r中的任一个的踩踏,从而能够同时解除左制动装置142f和右制动装置142r的制动。
63.另外,如图1所示,制动操作构件141包括驻车制动器144。驻车制动器144例如是设置于左制动踏板141f和右制动踏板141r附近且摆动自如的驻车杆,通过操作驻车杆,由连杆机构锁定左制动踏板141f和右制动踏板141r,从而进行左制动装置142f和右制动装置142r的制动。
64.上述的驻车制动器144不限于上述机构。驻车制动器144也可以是通过操作构件的操作而锁定设置于后轮驱动轴93的齿轮的旋转从而进行制动的机构。或者,驻车制动器144也可以是通过操作构件的操作而向左制动装置142f和右制动装置142r的盘(制动盘)按压来制动的机构,也可以是利用电动使左制动装置142f以及右制动装置142r动作来进行制动的机构。
65.如图2所示,拖拉机1具有控制装置120和存储装置(存储部)121。控制装置120由cpu、电气电子电路、存储于该控制装置120中的程序等构成。控制装置120进行关于拖拉机1的各种控制。存储装置121由非易失性的存储器等构成。
66.在控制装置120连接有使离合器机构52(第一离合器装置52a、第二离合器装置52b)动作的多个电磁控制阀130。多个电磁控制阀130包括:第一电磁控制阀130a,使第一离合器装置52a动作;第二电磁控制阀130b,使第二离合器装置52b的前进离合器部75动作;以及第三电磁控制阀130c,使第二离合器装置52b的后退离合器部76动作。
67.第一电磁控制阀130a、第二电磁控制阀130b以及第三电磁控制阀130c分别具有螺线管,是根据对螺线管励磁的电流而开度变化的阀。第一电磁控制阀130a、第二电磁控制阀130b以及第三电磁控制阀130c随着对螺线管励磁后的电流变大而开度变大,随着对螺线管励磁后的电流变小而开度变小。在对第一电磁控制阀130a、第二电磁控制阀130b以及第三电磁控制阀130c的螺线管进行消磁,即在不赋予电流的情况下,第一电磁控制阀130a、第二电磁控制阀130b以及第三电磁控制阀130c完全关闭。
68.第一电磁控制阀130a与油路71e连接,第二电磁控制阀130b与油路75e连接,第三电磁控制阀130c与油路76e连接。在第一电磁控制阀130a、第二电磁控制阀130b以及第三电磁控制阀130c上连接有与液压泵p1不同的液压泵p2的油路131,能够供给动作油。在第一电磁控制阀130a、第二电磁控制阀130b以及第三电磁控制阀130c上连接有用于排出动作油的油路132,例如,在处于完全关闭状态的情况下,从输出口排出动作油。
69.控制装置120在切换离合器机构52(第一离合器装置52a、第二离合器装置52b)的情况下,即,在将行星齿轮变速机构51切换为高速侧或低速侧的情况下,将第一离合器装置52a以及第二离合器装置52b中的一方设为连接状态,将另一方设为切断状态。
70.具体而言,在行星齿轮变速机构51为高速侧且使车体3向前进侧行驶的情况(高速前进的情况)下,通过控制装置120向第一电磁控制阀130a的螺线管输出电流(控制信号)并完全打开该第一电磁控制阀130a,将第一离合器装置52a从切断状态切换为连接状态。另外,在高速前进的情况下,控制装置120对第二电磁控制阀130b以及第三电磁控制阀130c的螺线管进行消磁,通过完全关闭该第二电磁控制阀130b以及第三电磁控制阀130c,从而使第二离合器装置52b处于切断状态(中立状态)。
71.在行星齿轮变速机构51为低速侧且使车体3向前进侧行驶的情况(低速前进的情况)下,对第一电磁控制阀130a的螺线管进行消磁且对第二电磁控制阀130b的螺线管进行励磁。由此,第一电磁控制阀130a完全关闭并且第一离合器装置52a成为切断状态,第二电磁控制阀130b完全打开并且第二离合器装置52b的前进离合器部75成为连接状态。
72.在行星齿轮变速机构51为低速侧且使车体3向后退侧行驶的情况(低速后退的情况)下,对第一电磁控制阀130a的螺线管进行消磁且对第三电磁控制阀130c的螺线管进行励磁。由此,第一电磁控制阀130a完全关闭并且第一离合器装置52a成为切断状态,第三电磁控制阀130c完全打开并且第二离合器装置52b的后退离合器部76成为连接状态。
73.车体3的前进、后退通过行驶操作构件148来进行。行驶操作构件148是能够操作到使车体3前进的前进位置f、使车体3后退的后退位置r、使车体3不切换到前进和后退中的任一个的中立位置n(空档)的构件。例如,行驶操作构件148是配置于驾驶席10的前方或侧方的杆(往复杆)等。往复杆摆动自如地以三个阶段(前进位置f、后退位置r、中立位置n)支承于将手柄30支承为能够转动的操纵台上。如上所述,在往复杆切换为前进位置f的情况下,第一离合器装置52a以及前进离合器部75中的任一个成为连接状态。另外,在往复杆切换为后退位置r的情况下,后退离合器部76成为连接状态。另外,在往复杆切换为中立位置n的情况下,第一离合器装置52a、第二离合器装置52b(前进离合器部75、后退离合器部76)成为切断状态。即,离合器机构52(第一离合器装置52a、第二离合器装置52b)基于行驶操作构件148的前进位置f、后退位置r以及中立位置n的操作,进行由无级变速装置50变速后的驱动力的切换。
74.另外,在对车体3制动后的状态下,有时进行将车体3从停止状态切换到行驶状态的制动起步。即,在制动起步中,在进行了左制动踏板141f和右制动踏板141r的操作的状态(操作了制动操作构件141的状态)下,将行驶操作构件148从中立位置n切换到前进位置f以及后退位置r中的任一个。为了使制动起步时顺畅,控制装置120根据制动操作构件141的操作量(左制动踏板141f以及右制动踏板141r的操作量),来变更预先将行驶操作构件148保持在中立位置n的状态下的从无级变速装置50输出的驱动力即中立目标值。例如,控制装置120随着操作量(踩踏量)增加而减小中立目标值的绝对值,随着操作量(踩踏量)减少而增大中立目标值的绝对值。
75.以下,对从无级变速装置50输出的驱动力的目标值(前进目标值、后退目标值、中立目标值)的设定、制动起步进行详细说明。
76.控制装置120具有目标运算部120a和输出设定部120b。目标运算部120a以及输出设定部120b由设置于控制装置120的电气电子电路、存储于该控制装置120中的程序等构成。
77.目标运算部120a对将行驶操作构件148从中立位置n切换到前进位置f而使车体3前进时的从无级变速装置50输出的驱动力即前进目标输出值和将行驶操作构件148从中立位置n切换到后退位置r而使车体3后退时的从无级变速装置50输出的驱动力即后退目标输出值进行运算。目标运算部120a例如根据存储于存储装置121中的控制映射cm1来求出前进目标输出值以及后退目标输出值。
78.图3示出控制映射cm1的一例。
79.如图3所示,控制映射cm1示出了车速(行驶速度)与从无级变速装置50输出的驱动力的关系。
80.控制映射cm1包括表示在车体3前进时车速与无级变速装置50的驱动力的关系的线l1和表示在车体3后退时车速与无级变速装置50的驱动力的关系的线l2。在控制映射cm1中,前进时的驱动力用正值表示,后退时的驱动力用负值表示。从无级变速装置50输出的驱动力例如是行驶马达m1的旋转速度,用正值表示正转侧,用负值表示反转侧。此外,如图2所示,控制装置120通过控制与该控制装置120连接的调节器125,从而控制行驶马达m1的旋转速度。具体而言,调节器125包括电磁阀等控制阀(电磁控制阀)126。电磁控制阀126具有螺线管,是根据对螺线管进行励磁后的电流而开度变化的阀。随着对螺线管进行励磁后的电流变大而电磁控制阀126的开度变大,随着对螺线管励磁后的电流变小而电磁控制阀126的开度变小。在对电磁控制阀126的螺线管进行消磁即不赋予电流的情况下,电磁控制阀126完全关闭。通过电磁控制阀126,调节器125进行动作,液压泵p1的斜板的角度变化,由此作用于行驶马达m1的动作油的流量或压力变化,从而能够变更行驶马达m1的旋转速度。
81.此外,从无级变速装置50输出的驱动力,即在控制映射cm1中横轴用车速表示,但是也可以取而代之用后轮驱动轴93的旋转速度等表示,没有特别限定。
82.在使车体3前进的情况下,目标运算部120a基于控制映射cm1和线l1来运算前进目标输出值。例如,如时间点p1所示,在将车体3的前进时的车速设为40%的情况下,目标运算部120a将行驶马达m1的正转的旋转速度v1设定为前进目标输出值。例如,如时间点p2所示,在将车体3的前进时的车速设为100%(最大值)的情况下,目标运算部120a将行驶马达m1的反转的旋转速度v2设定为前进目标输出值。即,目标运算部120a根据前进时的车速(目标车
速)来设定行驶马达m1的旋转方向以及旋转速度。
83.在使车体3后退的情况下,目标运算部120a基于控制映射cm1和线l2来运算后退目标输出值。例如,如时间点p11所示,在将车体3的后退时的车速设为40%的情况下,目标运算部120a将行驶马达m1的反转的旋转速度v11设定为后退目标输出值。例如,如时间点p12所示,在将车体3的后退时的车速设为100%(最大值)的情况下,目标运算部120a将行驶马达m1的正转的旋转速度v2设定为后退目标输出值。即,目标运算部120a根据后退时的车速(目标车速)来设定行驶马达m1的旋转方向以及旋转速度。
84.另外,输出设定部120b基于前进目标输出值以及后退目标输出值来设定中立目标值。在此,在控制映射cm1中,在将未进行制动操作构件141的操作而从中立位置n向前进位置f切换时(前进的未制动起步时)的与纵轴平行的线设为l4,将未进行制动操作构件141的操作而从中立位置n向后退位置r切换时(后退的未制动起步时)的与纵轴平行的线设为l5的情况下,目标运算部120a将线l4与线l1交叉的值v1设定为前进目标输出值(第一目标值),将线l5与线l2交叉的值v11设定为后退目标输出值(第二目标值)。输出设定部120b将线l3与纵轴交叉的位置所示的值设定为中立目标值v3,线l3是将在线l1中成为前进目标输出值(第一目标值)v1的值的点j10与在线l2中成为后退目标输出值(第二目标值)v11的值的点j11连结的线。
85.另一方面,输出设定部120b在进行制动操作构件141的操作而从中立位置n向前进位置f切换时(制动起步时),基于前进目标输出值、后退目标输出值,来设定中立目标值。输出设定部120b基于根据踩踏量使线l4、l5向车速变小的一侧移动后的线l4a、线l5a、线l1、l2,来设定中立目标值。输出设定部120b在求出中立目标值时,使线l4a、线l5a的移动量δg增大。例如,在踩踏量为最大的情况下,输出设定部120b使线l4a、线l5a移动至与纵轴(y轴)一致为止,在踩踏量为最小的情况下,使线l4a、线l5a移动至与线l4、线l5一致为止,在踩踏量为50%的情况下,使线l4a、线l5a分别位于纵轴(y轴)与线l4、线l5之间。
86.输出设定部120b将线6与纵轴(y轴)的交点j3的值设定为中立目标值,线6是将使线l1延长的线l1a与线l4a的交点即第一点j1和线l2与线l5a的交点即第二点j2连结的线。即,输出设定部120b将中间值设定为中立目标值,该中间值是连结根据踩踏量使线l4a平行移动时的该线l4a与线l1a交叉的第一点的值(前进输出目标值)和根据踩踏量使线l5a平行移动时的该线l5a与线l2交叉的第二点j2的值(后退输出目标值)的中间值。
87.这样,通过根据踩踏量来变更中立目标值,能够使无级变速装置50的驱动力尽可能早地到达使车体3前进的制动起步后或者使车体3后退的制动起步后的前进输出目标值、后退目标输出值,能够减少变色冲击,并且还能够确保向离合器机构52的动作油的填充时间。
88.作业车辆1具有:车体3,设置有行驶装置7;无级变速装置50,具备液压泵p1和行驶马达m1,液压泵p1具有根据斜板角度来变更输出的斜板;以及行驶马达m1,具有旋转速度根据液压泵p1的输出而变化的输出轴58且输出轴58的动力能够向行驶装置7传递;行驶操作构件148,能够操作到使车体3前进的前进位置f、使车体3后退的后退位置r、使车体3不切换到前进和后退中的任一个的中立位置n;离合器机构52,基于行驶操作构件148的前进位置f、后退位置r以及中立位置n的操作,进行由无级变速装置50变速后的驱动力的切换;制动装置140,进行行驶装置7的制动;制动操作构件141,进行制动装置140的制动的操作;以及
控制装置120,根据制动操作构件141的操作量来变更将行驶操作构件148保持在中立位置n时的从无级变速装置50输出的驱动力即中立目标值。由此,在从进行了制动的状态使作业车辆1起步的情况下,由于能够根据制动操作构件141的操作量来变更从无级变速装置50输出的驱动力即中立目标值,能够使向刚刚起步的行驶装置7传递的动力适当。即,能够进行制动起步时的变速冲击的缓和等,能够提高制动起步时的行驶性。
89.控制装置120随着操作量增加而减小中立目标值,随着操作量减少而增大中立目标值。由此,在制动起步时,能够根据制动操作构件141的操作量即制动力,尽可能顺畅地向行驶装置7传递动力。
90.控制装置120具有:目标运算部120a,对将行驶操作构件148从中立位置n向前进位置f切换而使车体3前进时的从无级变速装置50输出的前进目标输出值、以及将行驶操作构件148从中立位置n向后退位置r切换而使车体3后退时的从无级变速装置50输出的后退目标输出值进行运算;输出设定部120b,基于制动操作构件141的操作量、前进目标输出值以及后退目标输出值来设定中立目标值。由此,在无级变速装置50中,由于能够在前进时与后退时从适当的旋转速度起步,因此,能够抑制在前进的起步时瞬时后退的现象。
91.输出设定部120b基于未进行制动操作构件141的操作而向前进位置f切换时的前进目标输出值即第一目标值和未进行制动操作构件141的操作而向后退位置r切换时的后退目标输出值即第二目标值来设定中立目标值。由此,能够根据前进目标输出值(第一目标值)和后退目标输出值(第二目标值)的平衡来设定中立目标值,能够使一边制动一边起步时的前进初动时的作业车辆1的动作和后退初动时的作业车辆1的动作稳定。
92.输出设定部120b将第一目标值和第二目标值的中间值设定为中立目标值。由此,能够使从中立位置向前进侧切换而起步的情况和从中立位置向后退侧切换而起步的情况的无级变速装置50的输出稳定。
93.输出设定部120b设定行驶马达m1的旋转速度,作为从无级变速装置50输出的驱动力。由此,通过行驶马达m1的旋转速度,能够简单地调整向行驶装置7的动力的传递程度。
94.作业车辆1具有:第一行星齿轮变速装置57h,将由无级变速装置50变速后的驱动力向高速侧变速;第二行星齿轮变速装置57l,与第一行星齿轮变速装置57h相比将由无级变速装置50变速后的驱动力向低速侧变速,离合器机构52具有:第一离合器装置52a,能够在将第一行星齿轮变速装置57h的驱动力向前进侧传递的连接状态和不向前进侧传递的切断状态之间切换;第二离合器装置52b,能够在将第二行星齿轮变速装置57l的驱动力向前进侧传递的连接状态、将第二行星齿轮变速装置57l的驱动力向后退侧传递的连接状态、以及不向前进侧和后退侧中的任一个传递的切断状态之间切换。由此,在通过第一行星齿轮变速装置57h和第二行星齿轮变速装置57l使驱动力在高速侧和低速侧之间切换,并且通过第一离合器装置52a以及第二离合器装置52b来切换前进和后退的结构中,能够防止制动起步时的变速冲击的缓和、制动起步时的瞬时的反向移动(逆行)。
95.控制装置120能够在预热运转模式和行驶运转模式之间切换。预热运转模式以及行驶运转模式能够自动或手动切换。预热运转模式是在切断从变速装置5向行驶装置7传递动力的状态下使变速装置5所具有的齿轮旋转的模式。行驶运转模式是在从变速装置5向行驶装置7传递动力的状态下使齿轮旋转的模式。即,行驶运转模式是能够通过驾驶员的手动操作、控制装置120的自动操作,使车体3行驶的模式,是如通常那样通过使变速装置5(无级
变速装置50、行星齿轮变速机构51、离合器机构52以及副变速机构53)动作来进行变速的模式。
96.具体而言,在控制装置120连接有能够测定润滑油温度的温度测定装置150。当点火开关等从断开(off)变成接通(on),原动机4驱动(原动机4的输出轴(曲柄轴)4a旋转)时,控制装置120参照由温度测定装置150检测出的温度(润滑油温度)。控制装置120在润滑油温度例如小于-15℃即小于阈值,润滑油的粘性高的情况(条件1)下,自动切换到预热运转模式。另一方面,控制装置120在润滑油温度为-15℃以上(阈值以上),润滑油的粘性低的情况下,自动切换到行驶运转模式。此外,判定润滑油温度的阈值只是一例,并不限定于上述的温度。
97.或者,控制装置120在副变速操作构件149处于中立位置且制动操作构件141的驻车制动器144为接通(由制动装置140正在进行行驶装置7的制动的状态)的情况下(条件2),自动切换到预热运转模式。此外,在副变速操作构件149处于中立位置、制动操作构件141的驻车制动器144为接通并且行驶操作构件148处于中立位置n的情况(条件3)下,控制装置120也可以自动地切换到预热运转模式。
98.或者,在制动操作构件141的驻车制动器144为接通且行驶操作构件148处于中立位置n的情况(条件4)下,控制装置120也可以自动地切换到预热运转模式。
99.控制装置120也可以在满足条件1和条件2的情况下,自动地切换到预热运转模式,也可以在满足条件1和条件3的情况下,自动地切换到预热运转模式,也可以在满足条件1和条件4的情况下,也可以自动地切换到预热运转模式。
100.此外,在满足条件1的状态下,在条件2、条件3以及条件4中的任一个条件脱离时,将条件显示于设置于拖拉机1的显示装置例如仪表盘,促使驾驶员整理条件。
101.控制装置120在切换为预热运转模式时,例如通过将第一离合器装置52a从切断状态切换为连接状态并且将第二离合器装置52b保持为切断状态,从而使第一行星齿轮变速装置57h旋转。或者,控制装置120在切换为预热运转模式时,通过在将第一离合器装置52a保持为连接状态的状态下将第二离合器装置52b从切断状态切换为连接状态,从而使第二行星齿轮变速装置57l旋转。例如,控制装置12在处于预热运转模式时,使前进离合器部75处于连接状态且使后退离合器部76处于切断状态、或者使前进离合器部75处于切断状态且将后退离合器部76处于连接状态。此外,控制装置120在处于预热运转模式时,设定原动机4的旋转速度(原动机旋转速度)的下限值,该原动机的旋转速度不低于下限值。
102.控制装置120也可以在切换为预热运转模式之后,参照由温度测定装置150检测出的润滑油温度,在该润滑油温度为-15℃以上的情况下,自动地切换为行驶运转模式。或者,控制装置120也可以在切换为预热运转模式之后,通过预热运转模式使第一行星齿轮变速装置57h或者第二行星齿轮变速装置57l动作之后,在经过了规定的时间的情况下,切换为行驶运转模式。
103.此外,在上述的实施方式中,控制装置120自动地切换到预热运转模式,但驾驶员也可以手动地切换到预热运转模式。在控制装置120连接有能够在预热运转模式与行驶运转模式之间手动地切换的切换装置155。切换装置155是设置于驾驶席10的周围并能够切换接通/断开的开关。在切换装置155为接通的情况(条件5)下,控制装置120切换到预热运转模式,在切换装置155为断开的情况下,控制装置120切换到行驶运转模式。此外,在将控制
装置120用手动切换到预热运转模式的情况下,也可以在满足条件5和条件2的情况下,切换到预热运转模式,也可以在满足条件5和条件3的情况下,切换到预热运转模式,也可以在满足条件5和条件4的情况下,切换到预热运转模式。在拖拉机1在预热运转模式下动作的情况下,也可以在将切换装置155手动地从接通切换到断开时强制地停止预热运转模式,而切换到行驶运转模式。
104.图5a和图5b示出了控制装置120的动作流程的一例。
105.如图5a所示,当开始原动机4的驱动时,首先,控制装置120设定为行驶运转模式(s1)。控制装置120判断是否满足预热运转模式的切换条件(条件1和条件2、条件1和条件3)(s2)。在满足预热运转模式的切换条件的情况下(s2为“是”),从行驶运转模式自动地切换到预热运转模式(s3)。当切换到预热运转模式时,控制装置120例如通过使第一离合器装置52a以及第二离合器装置52b中的任一个处于连接状态,从而使行星齿轮变速装置57旋转(s4)。控制装置120在润滑油温度为阈值以上或者从执行预热运转模式开始所经过时间为规定以上的情况下(s5为“是”),从预热运转模式切换到行驶运转模式(s6)。控制装置120在润滑油温度小于阈值或者从执行预热运转模式开始所经过时间小于规定的情况下(s5为“否”),持续预热运转模式。此外,在预热运转模式的持续过程中,在将切换装置155接通后又切换为断开的情况下,强制地切换为行驶运转模式。
106.如图5b所示,当开始原动机4的驱动时,首先,控制装置120设定为行驶运转模式(s1)。控制装置120判断是否满足预热运转模式的切换条件(条件5和条件2、条件5和条件3、条件5和条件4)(s11)。在满足预热运转模式的切换条件的情况下(s11为“是”),通过手动从行驶运转模式切换到预热运转模式(s12)。当切换到预热运转模式时,控制装置120例如通过使第一离合器装置52a以及第二离合器装置52b中的任一个处于连接状态,从而使行星齿轮变速装置57旋转(s13)。控制装置120在润滑油温度为阈值以上或者从执行预热运转模式开始所经过时间为规定以上的情况下(s14为“是”),从预热运转模式切换到行驶运转模式(s15)。控制装置120在润滑油温度小于阈值或者从执行预热运转模式开始所经过时间小于规定的情况下(s14为“否”),持续预热运转模式。此外,在预热运转模式的持续过程中,在将切换装置155接通后又切换为断开的情况下,强制地切换为行驶运转模式。
107.作业车辆1具有:车体3,设置有行驶装置7;原动机4,设置于车体3;变速装置5,能够对来自原动机4的驱动力进行变速并向行驶装置7传递;变速箱12,容纳变速装置5且填充有润滑油;以及控制装置120,能够在预热运转模式和行驶运转模式之前切换,该预热运转模式是在切断从变速装置5向行驶装置7传递动力的状态下使变速装置5所具有的齿轮旋转的模式;该行驶运转模式是在从变速装置5向行驶装置7传递动力的状态下使齿轮旋转的模式。由此,在处于行驶运转模式时,通过使变速装置5的齿轮旋转来进行行驶,另一方面,在处于预热运转模式时,通过使变速装置5的齿轮旋转,能够使变速装置5内的润滑油的温度迅速上升,能够高效地预热。即,能够通过变速装置5的齿轮的旋转使润滑油的温度上升。
108.作业车辆1具有能够测定润滑油的温度的温度测定装置150,控制装置120在温度测定装置150测定出的温度小于阈值的情况下,切换到预热运转模式,在温度为阈值以上的情况下,切换到行驶运转模式。由此,在润滑油的温度低且粘性高的情况下,能够自动地进行预热驾驶,在润滑油的温度高且粘性低的情况下,能够切换为行驶。
109.控制装置120在从通过预热运转模式使齿轮旋转起经过了规定时间后切换到行驶
运转模式。由此,能够仅在规定时间进行预热驾驶,预热驾驶后,能够切换为行驶运转模式而一边行驶一边进行作业。
110.作业车辆1具有能够通过手动切换预热运转模式和行驶运转模式的切换装置155。由此,由驾驶员等在需要预热的情况、需要行驶的情况下等,能够按照驾驶员的意图进行预热和行驶。
111.作业车辆1具有进行行驶装置7的制动的制动装置140,变速装置5具有能够将来自原动机4的驱动力多档地变速的副变速机构53,控制装置120在副变速机构53不进行变速的中立状态且通过制动装置140进行行驶装置7的制动的状态下切换到预热运转模式。由此,以不通过副变速机构53向行驶装置7传递动力并且进行制动为条件,能够在使作业车辆1适当地停止的状态下进行预热驾驶。
112.作业车辆1具有:制动操作构件141,进行制动装置140的制动的操作;以及副变速操作构件149,能够将副变速机构53切换到中立状态。由此,基于驾驶员的制动操作构件141以及副变速操作构件149的操作,能够可靠地使作业车辆1处于不动的状态。
113.控制装置120在处于预热运转模式的情况下,使第一离合器装置52a以及第二离合器装置52b中的任一个处于连接状态。由此,通过使第一离合器装置52a以及第二离合器装置52b中的任一个处于连接状态,从而能够在预热驾驶时使行星齿轮变速装置57动作,能够在更短时间内结束预热。
114.此外,在进行预热驾驶时向行驶装置7等的动力被断开(被切断)即可,能够应用于通过往复杆而处于中立状态的作业车辆1。在该情况下,即使在坡道等也能够进行预热驾驶。
115.另外,控制装置120在向行驶装置7等的动力被切断的情况下切换为预热运转模式即可,即使在未进行制动的状态下也能够成为预热运转模式。在该情况下,控制装置120在以预热运转模式执行预热的情况下,使左制动装置142f以及右制动装置142r动作而处于制动状态。
116.应该理解为,本次公开的实施方式在所有方面都是例示而不是限制性的。本发明的范围不是由上述说明示出的,而是由权利要求书示出的,意在包括与权利要求书等同的意思和范围内的所有变更。
117.附图标记说明
118.1:作业车辆
119.3:车体
120.5:变速装置
121.7:行驶装置
122.50:无级变速装置
123.52:离合器机构
124.52a:第一离合器装置
125.52b:第二离合器装置
126.56b:斜板
127.57:行星齿轮变速装置
128.57h:第一行星齿轮变速装置
129.57l:第二行星齿轮变速装置
130.58:输出轴
131.120:控制装置
132.120a:目标运算部
133.120b:输出设定部
134.140:制动装置
135.141:制动操作构件
136.148:行驶操作构件
137.f:前进位置
138.m1:行驶马达
139.n:中立位置
140.p1:液压泵
141.p2:液压泵
142.r:后退位置
143.v1:旋转速度
144.v11:旋转速度
145.v2:旋转速度
146.v3:中立目标值
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1