尤其是混动车辆中车轮车桥与驱动机器的联结的控制方法与流程
1.本发明要求于2020年1月9日提交的法国申请n
°
2000172的优先权,该申请的内容(文本、附图和权利要求)通过引用并入本文。
2.本发明大体上涉及对于陆地车辆(例如混动机动车辆)中的车轮车桥与驱动机器的联结的控制,但并不限于此。更具体地,本发明涉及一种用于控制集成有自动变速箱的车辆牵引链中的车轮车桥与驱动机器的联结的控制方法。本发明特许地应用于但并不限于包括至少两个(热力、电动和/或液动类型的)驱动机器的混动车辆中。
背景技术:
3.术语“自动变速箱”此处需被广义地解释,并且尤其是涵盖了经手动操控或经自动化的变速箱和双离合器类型的变速箱,但并不限于此。由此,根据变速箱的类型,相关联的联结构件可以是干式离合器或湿式离合器。
4.通常,在装备有自动变速箱的车辆中,控制计算机(例如发动机管控计算机)管理与所述自动变速箱相关联的车轮车桥与所述驱动机器的联结,并且尤其是基于油门踏板的位置管理所述自动变速箱中待接合的传动比。所述油门踏板的位置表示由所述车辆的驾驶员所请求的车轮转矩。
5.在所述控制计算机中,不同的且独立的第一功能和第二功能分别决定所述车轮车桥与所述驱动机器的联结以及所述变速箱中待接合的传动比。
6.由此,当满足经确定条件时,特别是当由所述车辆的驾驶员所请求的车轮转矩大于预限定阈值时,上文提及的第一功能决定所述车轮车桥与所述驱动机器的联结。该第一功能在自身的决定中没有考虑到所述变速箱中待接合的传动比的演变,所述待接合的传动比自身由上文提及的第二功能决定。
7.所述第二功能尤其是间接地根据所述油门踏板的位置确定所述变速箱中待接合的传动比。通常,所述油门踏板越下压,所述变速箱中待接合的传动比越小。
8.在现有技术中,已知在特别行驶条件下禁止请求传动比改变。对于所述传动比改变的禁止由本领域技术人员表示成“动态更正”,该禁止可尤其是介入到脚从所述油门踏板快速抬升、行驶在脚抬起的陡峭斜坡中、行驶在使所述车辆经受一定等级的侧向加速度的弯道中、车辆路线管控系统(所谓“esp”,即“electronic stability program”)介入、检测到驱动车轮的过度打滑以及所述油门踏板的逐渐下压直到所述油门踏板稳定的情形中。
9.在由所述驾驶员在所述油门踏板上逐渐按压的生命情形中,本发明实体注意到可能发生不利于驾驶乐趣的事件。
10.事实上,在在所述油门踏板上逐渐按压时,所述第一功能可决定所述车轮车桥与由此由所述第二功能确定的传动比的联结,接下来,伴随着所述油门踏板的下压,所述第二功能可决定改变传动比,该改变是多次的直到使得所述油门踏板不再演变。
11.由于负责实施传动比改变和负责所述车轮车桥的联结的控制计算机不一定具有中断经接合动作的能力,可能发生以下事件,其中,在由所述驾驶员在油门踏板上逐渐按压
时,一个或多个传动比改变在所述车轮车桥与所述驱动机器的联结期间或正好在该联结之后介入。正好在所述车轮车桥的联结之后发生的传动比改变延长了用于布置由驾驶员所期望的转矩的布置时间并且产生了所述车辆在“多个时间”的加速,这会影响驾驶乐趣。
技术实现要素:
12.期望通过提出一种经改进的方法来解决上文提及的现有技术缺点,所述方法用于控制集成有自动变速箱的车辆牵引链中的车轮车桥与驱动机器的联结。
13.根据第一方面,本发明涉及一种用于控制车辆的牵引链中的车轮车桥与驱动机器的联结的控制方法,所述牵引链包括自动变速箱和用于与所述驱动机器联结的联结构件,所述方法包括由所述车辆的计算机根据所述车辆的油门踏板的致动提供用于所述联结构件的联结命令。依照本发明,所述方法包括:检测所述油门踏板的预确定类型的致动,所述预确定类型的致动可能促使所述自动变速箱中的至少一个传动比改变;以及,在检测到所述预确定类型的致动时阻止所述联结命令以便禁止通过所述联结构件传输转矩。
14.根据特别特征,所述预确定类型的致动是在所述油门踏板上的逐渐按压。
15.根据另一特别特征,所述检测包括:计算所述油门踏板的位置的经加有标记的梯度(gradient sign
é
);以及,对所述经加有标记的梯度的幅度与高阈值和低阈值进行比较,当所述幅度超越所述高阈值时检测到所述预确定类型的致动。
16.还根据另一特别特征,所述高阈值和低阈值具有可设定参数的值。
17.还根据另一特别特征,所述检测还包括用于取消对于所述联结命令的阻止所需要的确认时长,当所述经加有标记的梯度的幅度在所述确认时长期间不超过所述低阈值时所述取消介入。
18.还根据另一特别特征,所述确认时长具有可设定参数的值。
19.根据另一方面,本发明还涉及一种计算机,所述计算机包括存储程序指令的存储器,所述程序指令用于实施如上文简要描述的方法。
20.本发明还涉及一种车辆,所述车辆装备有自动变速箱并且包括如上文描述的计算机。
附图说明
21.通过阅读本发明下文中的多个实施例的详细说明和附图,本发明的其它优点和特征将更加清楚,在所述附图中:
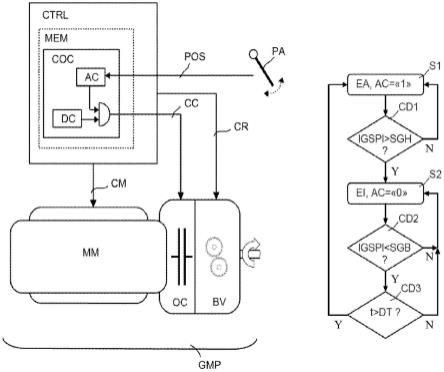
22.图1是车辆动力总成和控制计算机的示意性框图,在所述控制计算机中收容有软件模块,所述软件模块用于实施根据本发明的方法的特别实施例。
23.图2是用于描述根据本发明的方法的原理流程图。
具体实施方式
24.参考图1,认为,车辆包括专用于所述车辆的车轮车桥的动力总成gmp。动力总成gmp包括驱动机器mm和自动变速箱bv。联结构件oc(例如干式离合器)确保了车轮车桥与驱动机器mm联结的联结功能。当联结构件oc处于闭合状态时,由驱动机器mm提供的发动机转矩朝向变速箱bv和车轮车桥传输。联结构件oc的断开状态禁止发动机转矩从驱动机器mm朝
向变速箱bv和车轮车桥传输。
25.在车辆中,计算机ctrl确保了通过应用能够响应所述车辆的不同生命情形的控制策略控制动力总成gmp。计算机ctrl根据驾驶员在所述车辆的不同控制构件(例如油门踏板)上的动作以及根据来源于不同传感器的信息实施所述控制策略。来源于传感器以及来源于所述控制策略所需要的构件的信息由计算机ctrl通常地在车辆数据传递网络(例如“can”总线类型的网络)上读取。
26.依照本发明方法的对于联结构件oc的控制由软件模块coc实施,该软件模块经收容和执行在计算机ctrl中。软件模块coc安装在计算机ctrl的存储器mem中。本发明方法通过由计算机ctrl的处理器(未示出)执行软件模块coc的程序代码指令来实施。
27.如图1上示意性所示,软件模块coc接收所述车辆的油门踏板pa的位置pos作为输入并且发送用于联结构件oc的联结命令cc。
28.图1上未示出的与软件模块coc不同的其它软件模块也经收容在计算机ctrl中以控制变速箱bv和驱动机器mm。在图1上,示出了传动比改变命令cr和驱动机器命令cm,所述传动比改变命令使待接合传动比设定值提供至变速箱bv,所述驱动机器命令使转速/转矩设定值提供至驱动机器mm。
29.联结命令cc是联结构件oc的有效致动命令并且依照本发明的方法确定。联结命令cc的激活逻辑状态“1”和非激活逻辑状态“0”分别确定了联结构件oc的闭合状态和断开状态。
30.如图1上示意性所示,在本发明的方法中,联结命令cc由在联结请求dc与联结授权ac之间的“与”逻辑功能建立。
31.联结请求dc以已知的方式确定,如更上文在与现有技术有关的评论(参见“第一功能”)中所描述地。逻辑状态“1”和逻辑状态“0”分别确定了激活联结请求dc和非激活联结请求dc。
32.在本发明方法中所设置的联结授权ac通过考虑油门踏板pa的位置pos的随时间演变进行计算来推导,以便检测在油门踏板pa上的逐渐按压,该逐渐按压可能引起在联结构件oc的闭合之后的传动比改变。逻辑状态“1”和逻辑状态“0”分别确定了激活联结授权ac和非激活联结授权ac。
33.现在更具体地参考图2,上文详细描述了根据本发明的方法,该方法经实施用于动态地更正联结命令cc并且阻止更上文指出的与现有技术有关的评论中的缺点的发生。
34.在本发明中,为了避免可能发生在车轮车桥与驱动机器mm的联结之后的多次传动比改变,当检测到在油门踏板pa上的逐渐按压时,联结请求cc经无效化(ac=“0”),直到使得油门踏板pa不再演变或几乎不演变。换句话说,这归于在油门踏板pa的逐渐下压期间延迟联结构件oc的闭合,以便使得所述传动比改变发生在联结构件oc的有效闭合之前。在油门踏板pa上的逐渐按压借助于油门踏板pa的位置pos的经加有标记的梯度(下文中表示成gsp)检测。由此,经加有标记的梯度gsp由等式gsp=d(pos)/dt给出。经加有标记的梯度gsp以及该经加有标记的梯度的幅度与可设定参数的高阈值和低阈值sgh和sgb的比较能够决定待分配至联结授权ac的逻辑状态。
35.在图2的流程图中,块s1和s2是状态块,块cd1至cd3是条件块,这些条件块表示从块s1的状态朝向块s2的状态(或相反地)过渡所需的条件。
36.块s1表示授权联结构件oc闭合的授权状态ea。在处于该状态时,联结授权ac激活,ac=“1”。软件模块coc由此向联结构件oc提供联结命令cc=dc,如果联结请求dc激活,dc=“1”,该联结命令促使该联结构件闭合。
37.块s2表示禁止联结构件oc闭合的禁止状态ei。在处于该状态时,联结授权ac非激活,ac=“0”。软件模块coc由此向联结构件oc提供联结命令cc=“0”,无论联结请求dc的状态如何,该联结命令保持该联结构件断开。
38.在条件块cd1至cd3中,梯度gsp的标记能够使得在油门踏板pa上的按压与该油门踏板的松弛之间区分开。
39.条件块cd1管理从块s1的授权状态ea朝向块s2的禁止状态ei的过渡。
40.在条件块cd1中,当梯度gsp的标记验证了是在油门踏板pa上的按压的情形时,梯度gsp的幅度与高阈值sgh进行比较。
41.在梯度gsp的幅度大于高阈值sgh(igspi》sgh)的情况下,决定了在油门踏板pa上的该按压可能在联结构件oc闭合之后促使至少一个传动比改变。条件块cd1由此激活输出y,y=“1”,该输出验证了朝向块s2和因此禁止状态ei的过渡。联结授权ac由此非激活,ac=“0”,并且禁止联结构件oc闭合。
42.在梯度gsp的幅度不大于高阈值sgh的情况下,决定了在油门踏板pa上的该按压不可能在联结构件oc闭合之后促使传动比改变。条件块cd1由此激活输出n,n=“1”,该输出验证了向块s1和因此授权状态ea上的回环。联结授权ac因此保持激活,ac=“1”,并且授权联结构件oc闭合。
43.条件块cd2和cd3管理从块s2的禁止状态ei朝向块s1的授权状态ea的过渡。
44.在条件块cd2中,当梯度gsp的符号验证了是在油门踏板pa上的按压的情形时,梯度gsp的幅度与低阈值sgb进行比较。
45.在梯度gsp的幅度小于低阈值sgb的情况下(igsbi《sgb),检测到油门踏板pa的微弱演变,不可能在联结构件oc的闭合之后促使传动比改变。条件块cd2由此激活输出y,y=“1”,该输出触发在条件块cd3中的确认时长dt的计数。条件块cd3的确认时长dt是可设定参数的,并且能够确认块cd2检测到igsbi《sgb的充分持久性。
46.在条件块cd3中,如果块cd2检测到igsbi《sgb在大于确认时长dt的时间t(t》dt)期间持续,条件块cd2由此激活输出y,y=“1”,该输出验证了朝向块s1的过渡和因此朝向授权状态ea的返回。联结授权ac由此激活,ac=“1”,并且授权联结构件oc闭合。在相反的情况下,也就是说,如果检测到igsbi《sgb在确认时长dt的末尾之前(t》dt)中断,条件块cd2由此激活输出n,n=“1”,该输出验证了向块s2和因此禁止状态ei上的回环。联结授权ac因此保持非激活,ac=“0”,并且禁止联结构件oc闭合。
47.在条件块cd2中,如果梯度gsp的幅度不下降到低阈值sgb之下,检测到油门踏板pa的显著演变,即保持可能在联结构件oc的闭合之后促使传动比改变的演变。条件块cd2由此激活输出n,n=“1”,该输出验证了向块s2和因此禁止状态ei上的回环。联结授权ac因此保持非激活,ac=“0”,并且禁止联结构件oc闭合。
48.作为示例,考虑到所述油门踏板的位置pos经测量成所述踏板的总行程百分比在所述踏板的完全松弛状态(其对应于pos=0%)与所述踏板的完全下压状态(其对应于pos=100%)之间,以下值可分配至高阈值sgh、低阈值sgb和确认时长dt:
49.sgh=200%/s(可在0至10000%/s的范围中设定参数);
50.sgb=50%/s(可在0至10000%/s的范围中设定参数);以及
51.dt=100ms(可在0至1000ms的范围中设定参数)。
52.注意到,位置pos的测量单位可以是毫米(mm)、角度(
°
)或弧度。
53.在本发明中,所述油门踏板的位置的经加有标记的梯度与高阈值和低阈值的比较结果用作决定标准,所述决定标准在由所述驾驶员逐渐按压油门踏板的情况下决定传动系中的车轮车桥与自动变速箱的联结。本发明提供了经应用于所述车轮车桥的联结请求的“动态更正”,该动态更正在由所述驾驶员逐渐按压油门踏板的情况下激活。由于本发明,仅在所述变速箱中待接合的传动比稳定之后验证所述车轮车桥的联结请求。所述车轮车桥的联结可直接地介入该传动比并因此更快速。由此避免了上文提及的在多个时间的加速现象并且改善了在加速过程中的驾驶乐趣。
54.本发明并不限于此处作为示例已描述的特别实施例。本领域技术人员根据本发明的应用可在本发明的保护范围中提供不同的修改和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1