一种具有热检测功能的管道机器人及控制方法与控制系统与流程
1.本发明涉及机器人技术领域,具体而言,涉及一种具有热检测功能的管道机器人及控制方法与控制系统。
背景技术:
2.目前对于管道的检测、维修,或是管道内状态探勘,又或者对于管道内淤积进行清理,大多采用管道机器人来完成。其中关于管道的检测,大多倚赖影像辨识来完成。然而,影像辨识仅能辨识管道内壁表面的缺陷,对于管道结构上的缺陷则是难以辨识,也因此,本发明者认为此种问题需要被解决,而开始思考解决的办法。
技术实现要素:
3.本发明解决的问题是前述管道机器人在辨识管道的缺陷时,仅能判断管道表面的缺陷,对于结构上的缺陷则是难以辨识。
4.为解决上述问题,本发明提供一种具有热检测功能的管道机器人及控制方法与控制系统,其技术方案如下:
5.管道机器人本体于管道内,过预设路线的设定,又或者透过远程控制的方式来控制所述管道机器人本体移动,接着检测所述管道时,首先先利用闪光灯对所述管道进行脉冲加热,同时利用热影像撷取单元取得所述管道的热影像撷取数据,接下来利用热影像辨识单元对所述热影像撷取数据进行热影像辨识,辨识过程首先将所述热影像撷取数据制作成三维热影像矩阵数据,再由所述三维热影像矩阵数据转换成二维热影像矩阵数据,接着将所述二维热影像矩阵数据进行置中化处理得到一置中化矩阵,再来对所述置中化矩阵进行奇异值的分解,得到一主成分分析负荷矩阵,接下来再根据主成分分析负荷矩阵进行运算,运算结果呈现收敛状态时得到一稀疏负荷矩阵,运算结果呈现未收敛时,则是分别更新主成分分析负荷矩阵的各主成分以及稀疏负荷矩阵的各主成分。
6.接下来将所述稀疏负荷矩阵的主成分重新排列成二维的m
x
*my,即可得到稀疏主成分负荷图。如此一来,管理人员便可透过所述稀疏主成分负荷图了解所述管道是否发生结构上缺陷,以利后续进行相关补救措施。
附图说明
7.图1为本发明的实施例示意图1;
8.图2为本发明的实施例示意图2;
9.图3为本发明的实施例示意图3;
10.图4为本发明各组件的链接示意图;
11.图5为本发明热检测结果示意图;
12.图6为本发明工作流程图;
13.图7为本创作三维热影像矩阵数据示意图;
14.图8为本创作二维热影像矩阵数据示意图。
15.附图标记说明:
16.a-控制中心;b-管道;c1-板体;c2-稀疏主成分负荷图;c3-稀疏主成分负荷图;d-结构缺陷;1-管道机器人本体;11-尖部;2-闪光灯;3-热影像撷取单元;4-处理器;5-压缸单元;6-动力轮组;7-流速侦测单元;8-定位单元;9-热影像辨识单元。
具体实施方式
17.为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
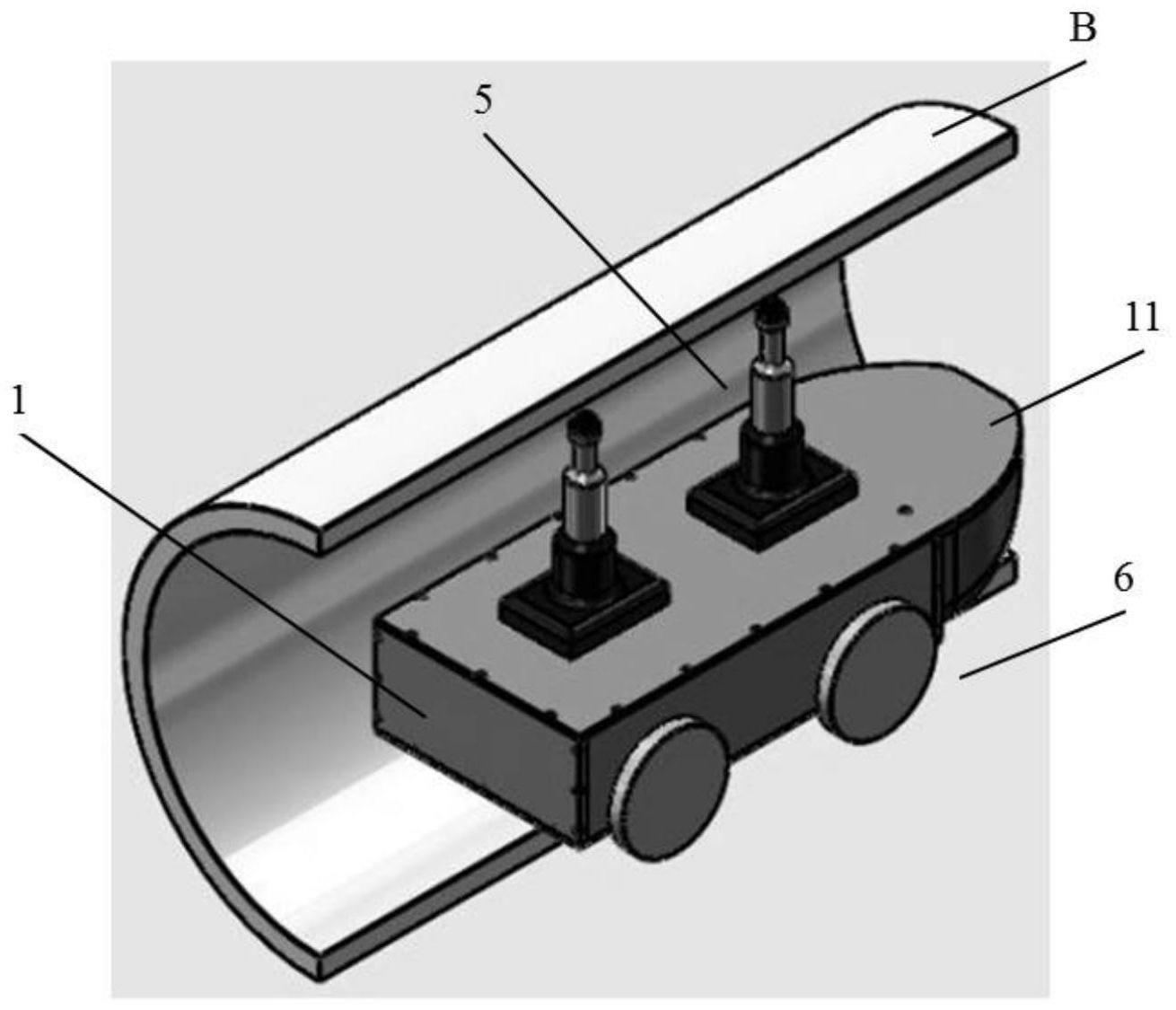
18.请看图1至图4所示,本发明是关于一种具有热检测功能的管道机器人及控制方法与控制系统,本发明主要包括:
19.一管道机器人本体1、一闪光灯2、一热影像撷取单元3、一处理器4、一压缸单元5、一动力轮组6、一流速侦测单元7、一定位单元8,及一热影像辨识单元9。一控制中心a可供远程联机所述管道机器人本体1、所述热影像辨识单元9、所述处理器4。其中所述闪光灯2及所述热影像撷取单元3设于所述管道机器人本体1外侧,所述动力轮组6设于所述管道机器人本体1底部、所述压缸单元5设于所述管道机器人本体1顶面。
20.本发明于检测管道b时,可透过所述控制中心a控制所述管道机器人本体1在所述管到b内的移动方向,或是各组件的工作状况。再来,检测时首先是控制所述闪光灯2对所述管道b内壁较佳用2000w以上进行瞬间的脉冲加热(约0.2秒),使得所述管道b的温度上升,这时需立即利用所述热影像撷取单元3对所述管道b进行拍摄,以撷取出复数热影像撷取数据,所述热影像撷取单元3的撷取速率约30frame/second。
21.再来是根据复数所述热影像撷取数据进行结构缺陷的检验,本发明主要是根据主成分分析法(principal component analysis,pca)进行改进。首先,请配合图7所示,每个热影像撷取数据都具有复数水平像素数据及复数垂直像素数据,所述热影像辨识单元将各水平像素数据、各垂直像素数据及各热影像撷取数据制作成一三维热影像矩阵数据n
t
*n
x
*ny,其中n
t
代表所述热影像撷取数据、n
x
代表所述水平像素数据、ny代表所述垂直像素数据,然后请看图8所示,由于在做数据分析时三维的数据难以观察,所以接下来会将所述三维热影像矩阵数据转换成二维热影像矩阵数据n
t
*n
x
ny,其中n
x
ny代表变量数。
22.再来是将所述二维热影像矩阵数据进行置中化处理,置中化处理是所述热影像辨识单元9根据所述二维热影像矩阵数据的各变量数计算出一平均值,再将所述二维热影像矩阵数据的各变量数减去所述平均值以减少计算量,并可降低热源不均的影响,然后得到置中化矩阵x。然后对所述置中化矩阵进行奇异值分解(singular value decomposition,svd),其方式主要是根据公式:x=u∑v
t
,并令p=v且设定一系数值λ,其中p为主成分分析负荷矩阵、v负荷矩阵,且所述主成分分析负荷矩阵的各主成分为pk=[p1…
pk]。其中u与v分别为正交矩阵(orthogonal matrix)。
[0023]
接着,所述热影像辨识单元9根据所述主成分分析负荷矩阵进行稀疏化处理程序,主要是根据公式:来计算出稀疏负
荷矩阵中的各主要成分qk,并同时计算出一稀疏负荷矩阵q。
[0024]
取得稀疏负荷矩阵的过程中,假使所述稀疏负荷矩阵形成收敛时,表示稀疏化成功,接着所述热影像辨识单元9会根据所述稀疏负荷矩阵的主成分重新排列成二维的m
x
*my,即可得到稀疏主成分负荷图。如此一来,所述控制中心a或者管理人员便可以透过所述稀疏主成分负荷图了解所述管道b是否有发生结构缺陷。这里值得一提的是,稀疏程度可以透过调整系数值λ来达成,当稀疏化程度过低时可提高系数值λ,反之,当稀疏化程度过高时则是降低系数值λ,如此一来可透过调整系数值λ,来得到最适合观察缺陷的稀疏度。另外需注意的是系数值λ不可为0,倘若系数值λ为0则是一般的主成分分析法(pca)。请再配合看到图5为具有结构缺陷d的板体c1示意图,当选取适合观察缺陷的系数值λ后,会如同稀疏主成分负荷图c2所示,将呈现明显的结构缺陷位置,倘若系数值λ设定过高,则会如同稀疏主成分负荷图c3所示,将无法呈现出缺陷位置。
[0025]
取得稀疏负荷矩阵的过程中,假使所述稀疏负荷矩阵未形成收敛时,表示稀疏化失败,这时需重新调整qk及pk,调整方式主要是先根据公式将qk进行单位化后,再重新更换新的pk,更换方式则是根据公式pk=(i-p
(k-1)
p
(k-1)t
)x
t
xqk来取得每一个pk更新值,更新完pk后再对pk进行单元化,单位化的方式主要是根据公式:来达成。这些步骤都完成后,则是重新回头开始前述稀疏化处理程序。其中i代表单位矩阵。
[0026]
如此一来,利用本发明可快速、且有效地取得所述稀疏主成分负荷图,以了解所述管道是否有发生结构缺陷。此外,当发现所述管道b产生结构缺陷时,可透过所述定位单元8侦测所述管道机器人本体1所在位置而得到一定位数据,所述处理器4会立即将所述定位数据及一警报讯号发送置所述控制中心a,发送的过程中最佳是连同所述稀疏主成分负荷图一起传送,以利管理人员了解状况。此外,所述管道机器人本体1较佳也设有摄像机,让管理人员可透过摄像机看到所述管道b内状况。
[0027]
所述管道机器人本体1在所述管道b内移动、检测的过程中难免会因为工作需要或者面临到流体冲击或其他外力影响,而发生翻覆或是需要固定等问题,为降低这些问题,所述管道机器人本体1前侧由左右二半部朝向中央逐渐渐缩而形成一尖部11,透过该尖部11可有效降低流体对于所述管道机器人本体1的冲击。倘若所述流速侦测单元7侦测到流体的流速过快而超出默认值时,这时所述处理器4会立刻控制所述压缸单元5的压缸杆顶住所述管道b顶壁,并控制所述动力轮组6停止工作,如此一来可让所述管道机器人本体1固定在所述管道b内而不易被流体给冲走。此外,也可以是在进行热检测的过程中,控制所述压缸杆顶住所述管道b顶壁,并控制所述动力轮组6停止工作,让所述热影像撷取数据的取得较不易产生误差。
[0028]
虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1