车载雷达检测力臂的制作方法
1.本发明涉及隧道盾构管片背后注浆密实性和矿上法暗挖隧道衬砌密实性检测技术领域。更具体地说,本发明涉及车载雷达检测力臂。
背景技术:
2.随着当前交通工具的发展,乘地铁出行是一种十分便捷的出行方式,但是地铁的建设需要深埋地底,盾构法掘进和管片施工则有效的加快了隧道的施工进度。近几年对盾构施工的质量安全问题越发重视,对盾构法施工的管片背后的混凝土密实情况也越发重视,在施工过程中对管片背后的混凝土密实情况进行地质雷达的检测,得到了广泛的推广,可以在施工过程中发现问题,总结原因并及时提出整改建议,为工程质量把关,也为后期的安全运营保驾护航。
3.中电科(青岛)电波技术有限公司和中国铁建重工集团有限公司联合研制有xj
‑
vng pr型车载探地雷达系统,但有如下缺点,一是购买雷达检测车费用高昂,二是雷达车所需要雷达仪器众多,一般检测单位不具备条件,三是盾构隧道内部空间狭小,不适合雷达检测车进行检测。众多的检测人员结合现场检测情况做出了多样的调整,现有的雷达扫描检测中均用搭建简易检测支架进行检测,人工在其上进行托举天线的方式进行检测,其优点是人能随时根据检测路径上的异常情况及时进行调整,工人劳动成本低,能就近取材,费用成本低,但也存在缺点,此方法耗费人力,需要工人默契的协调配合才能有效的完成检测工作,而且高空作业会带来极大安全隐患。
4.数控机床机械臂,是电脑数控上的一个成就,能够很好的按照编制好的程序进行操作加工,但现有的数控机械臂造价高昂,雷达检测本身费用较低,不适合用昂贵机械设备投入检测,但是数控机械臂的优势能更好的完成检测,节省人工消耗。
技术实现要素:
5.本发明的一个目的是提供一种车载雷达检测力臂,通过红外线测距仪,利用弹性伸缩装置和液压伸缩杆的伸缩性进行距离调控,精确控制雷达天线和管片之间的距离,确保检测结果的准确性。
6.为了实现根据本发明的这些目的和其它优点,提供了一种车载雷达检测力臂,其设置于轨道车上,所述轨道车配合于下方的轨道上行走,所述车载雷达检测力臂包括:
7.承载立柱,其下端设置于所述轨道车的车厢内底面中心;
8.支撑机构,其竖向设置于所述承重立柱的顶端,所述支撑机构顶端连接有液压伸缩杆;
9.雷达天线,其连接于所述液压伸缩杆的顶端,所述雷达天线顶部通过对称设置一对车轮紧贴待检测管片。
10.优选的是,所述雷达天线两侧还向外延伸对称设置有一对红外线测距仪,其正对所述管片发射红外线以监测所述雷达天线与所述管片之间的间距变化。
11.优选的是,所述雷达天线底端与所述液压伸缩杆顶端之间还设置有弹性伸缩装置,其包括:
12.限位框,其为具有上开口的方形结构,所述限位框的底端中心固定连接所述液压伸缩杆,所述限位框相对的两个上端向内弯折并水平延伸形成一对限位板;
13.伸缩件,其为倒t型结构,所述伸缩件的竖直端部固定于所述雷达天线的底端中心,所述伸缩件的水平两个端部分别位于一对限位板的正下方并通过一对限位板竖向限位;
14.限位套筒,其竖向设置且在所述限位框内间隔固定设置有多个,所述限位套筒还在所述伸缩件的水平件上竖直固定设置多个,所述伸缩件上的限位套筒恰好与所述限位框内的限位套筒一一对应,且所述伸缩件上的限位套筒恰好围设于所述限位框内的限位套筒外或套设于所述限位框内的限位套筒内,呈交错间隔设置;
15.伸缩弹簧,其在每一对所述伸缩件上的限位套筒与所述限位框内的限位套筒内均设置一个,所述伸缩弹簧两端分别固定于所述伸缩件及所述限位框的底端;
16.限位环,其与所述限位框内的限位套筒或所述伸缩件上的限位套筒中直径较小的一个大小保持一致,所述限位环对应每个伸缩弹簧设置一个,所述限位环设置于所述限位套筒内上并恰好固定套设于所述伸缩弹簧的其中一端部外,所述限位环和限位套筒的中心轴线均重合。
17.优选的是,所述轨道车的车厢内设置有电动油泵,其通过电线连接所述液压伸缩杆用于控制液压伸缩杆的伸缩长度,所述轨道车的车厢内还设置有数控集成电路板,分别电连接所述红外线测距仪和电动油泵,所述数控集成电路板包括依次电连接的数据获取模块、计算模块和控制模块,所述数据获取模块获取一对红外线测距仪的数据并传输给计算模块,所述计算模块计算一对红外线测距仪的数据平均值并转换为电动油泵的压力值,再将此压力值传输给控制模块,所述控制模块控制所述电动油泵的加压或减压,从而使得液压伸缩杆伸缩。
18.优选的是,所述液压伸缩杆与所述支撑机构在同一竖向设置。
19.优选的是,所述液压伸缩杆与所述支撑机构垂直设置,所述液压伸缩杆底端水平延伸固定于所述支撑机构顶端,所述液压伸缩杆还与所述支撑机构通过斜撑连接。
20.优选的是,所述承载立柱为圆柱形,其底端与所述轨道车的车厢内底面转动连接,并通过螺栓固定。
21.优选的是,所述支撑机构包括:
22.竖直支撑力臂,其竖直设置,所述液压伸缩杆设置于所述竖直支撑力臂的顶端;
23.上横向水平力臂,其两端分别铰接于所述承载立柱的顶端及所述竖直支撑力臂上;
24.下横向水平力臂,其位于所述上横向水平力臂的正下方,所述下横向水平力臂的两端分别铰接于所述承载立柱上及所述竖直支撑力臂的下端;
25.测斜固定支杆,其为伸缩杆,且所述测斜固定支杆的两端分别铰接于所述上横向水平力臂及所述竖直支撑力臂上。
26.优选的是,所述下横向水平力臂的端部水平向所述承载立柱外延伸并与侧拉控制杆的端部铰接,所述侧拉控制杆为倒t型结构,所述承载立柱上设置有侧拉控制杆的固定
点,所述雷达天线安装到位后,所述侧拉控制杆通过固定点固定于所述承载立柱上。
27.优选的是,所述承载立柱上设置有多个攀登脚梯。
28.本发明至少包括以下有益效果:
29.1、本发明检测力臂装置可自动伸缩,360度旋转,将该力臂安装在管片的轨道运输车上,便可对隧道的拱顶、拱腰、边墙等部位进行检测,既充分利用了检测线位置的测量和现场条件,又克服了现有现场障碍物的干扰。
30.2、本发明的检测力臂的特点是:控制便捷、拼装快速、就地取材、安全实用,避免工人高空作业产生危险,且使用管片运输的轨道电瓶车作为前进动力,可以确保采集数据速度均匀稳定。
31.3、传统的盾构管片检测都是通过搭建简易支架平台,人员在平台上站立,下方工人推动支架平台,在过程中遇到障碍物时,难以行进,高空作业人员支架晃动幅度较大时检测数据采集异常,而且上方作业人员存在高空坠落风险,且检测进度缓慢,人员费时费力。而本技术运用车载雷达检测力臂后,主要有如下几个特点:
32.1)能克服现场环境带来的干扰问题,检测数据均匀稳定;
33.2)在管片轨道上移动,速度稳定可控,雷达天线检测仪器与管片贴合面较好,提高检测效率;
34.3)能避免人员高空作业产生的风险问题;
35.4)能广泛的运用于已铺设轨道隧道,更便于进行检测;
36.5)安装简单便捷,能快速投入检测使用;
37.6)造价便宜,便于制作。
38.本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
附图说明
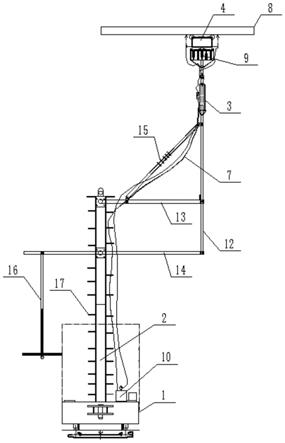
39.图1为本发明侧拉控制杆处于自由状态的结构示意图;
40.图2为本发明侧拉控制杆被固定的结构示意图;
41.图3为本发明雷达天线处的弹性伸缩装置的结构放大图;
42.图4为本发明雷达天线检测侧向管片的结构示意图。
43.附图标记说明:
44.1、轨道车,2、承载立柱,3、液压伸缩杆,4、雷达天线,5、车轮,6、红外线测距仪,7、电线,8、管片,9、弹性伸缩装置,91、限位框,92、伸缩件,93、限位板,94、限位套筒,95、伸缩弹簧,96、限位环,10、电动油泵,11、斜撑,12、竖直支撑力臂,13、上横向水平力臂,14、下横向水平力臂,15、测斜固定支杆,16、侧拉控制杆,17、攀登脚梯。
具体实施方式
45.下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
46.需要说明的是,下述实施方案中所述实验方法,如无特殊说明,均为常规方法,所述试剂和材料,如无特殊说明,均可从商业途径获得;在本发明的描述中,术语“横向”、“纵
向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,并不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
47.本发明采用了弹性装置和伸缩装置还有力学杠杆原理,通过电动油泵10和数控集成电路板进行控制,实现检测。
48.如图1至4所示,本发明提供一种车载雷达检测力臂,其设置于轨道车1上,所述轨道车1配合于下方的轨道上行走,所述车载雷达检测力臂包括:
49.承载立柱2,其下端设置于所述轨道车1的车厢内底面中心;
50.支撑机构,其竖向设置于所述承重立柱的顶端,所述支撑机构顶端连接有液压伸缩杆3;
51.雷达天线4,其连接于所述液压伸缩杆3的顶端,所述雷达天线4顶部通过对称设置一对车轮5紧贴待检测管片8。
52.在上述技术方案中,通过对检测测线位置的因素和现场条件的利用,设计出了车载检测力臂,通过运输管片8的轨道车1,对其进行加工,通过力学和距离的测算设计出车载检测力臂。在雷达上安装车轮5,首先用于减少待检测的盾构管片8对雷达天线4的摩擦力,从而保护检测仪器,其次是管片8与管片8间拼装不平整,雷达直接在管片8上检测时容易遇到阻挡磕坏检测仪器,造成检测停滞,检测数据采集异常,分析困难产生误判,车轮5的设置解决了地质雷达天线4和管片8间的摩擦阻力问题,以及管片8间不平整的问题。液压伸缩杆3的设置,可以调整雷达天线4与管片8之间的间距,使得两者紧密贴合,使得检测结果更为精确。
53.在另一种技术方案中,所述雷达天线4两侧还向外延伸对称设置有一对红外线测距仪6,其正对所述管片8发射红外线以监测所述雷达天线4与所述管片8之间的间距变化。
54.在上述技术方案中,雷达天线4两侧对称向外延伸一根固定杆,在其端部均固定红外线测距仪6,时刻检测雷达天线4与管片8的间距,初始状态,当雷达天线4贴紧管片8时测量出恒定值设为固定值,当红外线测距显示大于或小于固定值时,通过控制液压伸缩杆3的伸缩长度使得雷达天线4和管片8贴紧。
55.在另一种技术方案中,所述雷达天线4底端与所述液压伸缩杆3顶端之间还设置有弹性伸缩装置9,如图3所示,其包括:
56.限位框91,其为具有上开口的方形结构,所述限位框91的底端中心固定连接所述液压伸缩杆3,所述限位框91相对的两个上端向内弯折并水平延伸形成一对限位板93;
57.伸缩件92,其为倒t型结构,所述伸缩件92的竖直端部固定于所述雷达天线4的底端中心,所述伸缩件92的水平两个端部分别位于一对限位板93的正下方并通过一对限位板93竖向限位;
58.限位套筒94,其竖向设置且在所述限位框91内间隔固定设置有多个,所述限位套筒94还在所述伸缩件92的水平件上竖直固定设置多个,所述伸缩件92上的限位套筒94恰好与所述限位框91内的限位套筒94一一对应,且所述伸缩件92上的限位套筒94恰好围设于所述限位框91内的限位套筒94外或套设于所述限位框91内的限位套筒94内,呈交错间隔设置;
59.伸缩弹簧95,其在每一对所述伸缩件92上的限位套筒94与所述限位框91内的限位套筒94内均设置一个,所述伸缩弹簧95两端分别固定于所述伸缩件92及所述限位框91的底端;
60.限位环96,其与所述限位框91内的限位套筒94或所述伸缩件92上的限位套筒94中直径较小的一个大小保持一致,所述限位环96对应每个伸缩弹簧95设置一个,所述限位环96设置于所述限位套筒94内上并恰好固定套设于所述伸缩弹簧95的其中一端部外,所述限位环96和限位套筒94的中心轴线均重合。
61.在上述技术方案中,为了解决地质雷达天线4和管片8面的间距控制问题,间距陡然增加或减少时如何辅助液压伸缩杆3调节,以避免检测仪器损坏和数据采集异常等问题。雷达支座弹性伸缩装置9的设置,当管片8高度尺寸有变化时,液压伸缩杆3也就是后续描述的电动油泵10进行加压泵油使液压伸缩杆3调整反应缓慢时,通过雷达支座弹性伸缩装置9进行及时自主调整,避免雷达天线4撞击损坏,有效的完成检测数据采集。
62.设计弹性伸缩装置9进行减震,也是为了辅助液压伸缩杆3保证雷达天线4与管片8弹性贴紧。所述限位框91内的伸缩套筒上端与所述伸缩件92的顶端有一定的间距,所述伸缩件92上的限位套筒94下端与所述限位框91的内底面有一定的间距,而伸缩件92的水平件在初始状态时,与限位板93之间具有一定的间距,以满足实际调节的作用。结合上述红外线测距仪6,一对红外线测距仪6设定正常情况下的平均值为固定值,然后一对红外线测距仪6的监测数值的平均作为调控值,其与固定值较小的差距时,此较小差距根据实际的弹性伸缩装置9调节范围合理设定,由弹性伸缩装置9进行补充调整。
63.在另一种技术方案中,所述轨道车1的车厢内设置有电动油泵10,其通过电线7连接所述液压伸缩杆3用于控制液压伸缩杆3的伸缩长度,所述轨道车1的车厢内还设置有数控集成电路板,分别电连接所述红外线测距仪6和电动油泵10,所述数控集成电路板包括依次电连接的数据获取模块、计算模块和控制模块,所述数据获取模块获取一对红外线测距仪6的数据并传输给计算模块,所述计算模块计算一对红外线测距仪6的数据平均值并转换为电动油泵10的压力值,再将此压力值传输给控制模块,所述控制模块控制所述电动油泵10的加压或减压,从而使得液压伸缩杆3伸缩。
64.在上述技术方案中,在雷达天线4侧边安装红外线测距仪6控制伸缩进度,电动油泵10提供液压伸缩杆3伸缩动力,串联红外线测距仪6和液压伸缩杆3的为电动油泵10,需通过出数控集成电路板进行控制,通过数控集成电路板进行连接控制伸缩高度。雷达天线4两侧安装红外线测距仪6,当雷达天线4贴紧管片8时测量出恒定值设为固定值,当红外线测距显示大于或小于固定值,通过数控集成电路板,转为油泵压力值,控制电动油泵10进行加压泵油使液压伸缩装置升高(降低),解决地质雷达天线4和管片8面的距离间距控制问题。
65.在另一种技术方案中,如图1和图2所示,所述液压伸缩杆3与所述支撑机构在同一竖向设置。
66.在另一种技术方案中,如图4所示,所述液压伸缩杆3与所述支撑机构垂直设置,所述液压伸缩杆3底端水平延伸固定于所述支撑机构顶端,所述液压伸缩杆3还与所述支撑机构通过斜撑11连接。
67.在另一种技术方案中,所述承载立柱2为圆柱形,其底端与所述轨道车1的车厢内底面转动连接,并通过螺栓固定。通过人工旋转承载立柱2,实现承载立柱2的360度旋转,再
通过螺栓固定。
68.在上述三种技术方案中,液压伸缩杆3分别使得雷达天线4紧贴上方或侧方的管片8进行检测,使得在管片8上的检测范围可以多样变化,检测位置不一样,同时结合承载立柱2的360度旋转,实现管片8全方位全范围的检测。
69.在另一种技术方案中,所述支撑机构包括:
70.竖直支撑力臂12,其竖直设置,所述液压伸缩杆3设置于所述竖直支撑力臂12的顶端;
71.上横向水平力臂13,其两端分别铰接于所述承载立柱2的顶端及所述竖直支撑力臂12上;
72.下横向水平力臂14,其位于所述上横向水平力臂13的正下方,所述下横向水平力臂14的两端分别铰接于所述承载立柱2上及所述竖直支撑力臂12的下端;
73.测斜固定支杆15,其为伸缩杆,且所述测斜固定支杆15的两端分别铰接于所述上横向水平力臂13及所述竖直支撑力臂12上。
74.在上述技术方案中,竖直支撑力臂12、上横向水平力臂13、下横向水平力臂14和承载立柱2构成平行四边形,且由于均是铰接,初始状态时,可调整为向下倾斜的平行四边形,以降低雷达天线4的高度,方便进行安装,然后再人工将平行四边形转动为图中所示的矩形,将雷达天线4顶上去固定住,然后给电动油泵10通电,让雷达天线4贴近管片8。
75.在另一种技术方案中,所述下横向水平力臂14的端部水平向所述承载立柱2外延伸并与侧拉控制杆16的端部铰接,所述侧拉控制杆16为倒t型结构,所述承载立柱2上设置有侧拉控制杆16的固定点,所述雷达天线4安装到位后,所述侧拉控制杆16通过固定点固定于所述承载立柱2上。
76.在上述技术方案中,侧拉控制杆16用于调整上述支撑机构,方便用力操作,操作完成后,通过承载立柱2上的固定点将侧拉控制杆16固定住,避免人工拽。
77.在另一种技术方案中,所述承载立柱2上设置有多个攀登脚梯17,用于施工人员攀登进行安装施工。
78.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对于熟悉本领域的人员而言,可容易地实现另外的修改,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1