变速装置的控制装置、变速装置的控制系统、及车外运算装置的制作方法
1.本发明涉及变速装置的控制装置、变速装置的控制系统、及车外运算装置。
背景技术:
2.下述日本特开2007
‑
177932中记载了在自动变速装置发生异常的情况下将变速比固定的装置。
技术实现要素:
3.然而,自动变速装置的异常有时在短时间内自然恢复。相对于此,在上述装置中,即使在异常自然恢复之后变速比也仍保持固定。
4.因此,本发明提供一种在变速装置发生了异常的情况下,能够迅速地使变速比的调整返回良好状态的变速装置的控制装置、变速装置的控制系统以及车外运算装置。本发明涉及应用于车辆且具备摩擦卡合元件而自动地变更车载原动机与驱动轮的变速比的变速装置的控制装置、变速装置的控制系统以及车外运算装置。本发明的第一形态的变速装置的控制装置具备电子控制单元,该电子控制单元具有异常判定处理、失效保护处理、消除判定处理、以及解除处理。所述异常判定处理是判定所述变速装置有无异常的处理。所述失效保护处理是在通过所述异常判定处理判定为存在异常的情况下,使与所述异常对应的所述摩擦卡合元件成为释放状态并将所述变速装置的变速比固定的处理。所述消除判定处理是在通过所述异常判定处理判定为存在所述异常之后,基于在将与所述异常对应的所述摩擦卡合元件维持为释放状态的条件下操作该摩擦卡合元件的驱动装置时的输入信号的表现,判定该异常是否消除的处理。所述解除处理是在通过所述消除判定处理判定为消除的情况下,解除所述失效保护处理的处理。
5.根据上述第一形态的变速装置的控制装置,在发生了异常的情况下,执行使与异常对应的摩擦卡合元件成为释放状态的失效保护处理。由此,即使在发生了异常的情况下,也能够适当地进行经由变速装置的动力传递。而且,在上述结构中,在维持与异常对应的摩擦卡合元件的释放状态的条件下操作摩擦卡合元件的驱动装置。在此,在异常消除的情况下与未消除的情况下,操作驱动装置时的输入信号的表现存在不同的倾向。因此,根据上述的控制装置,基于操作驱动装置时的输入信号的表现,判定异常是否消除。并且,通过在判定为异常消除的情况下解除失效保护处理,从而在发生了短时间内消除的异常的情况下,能够迅速地使基于变速装置的变速比的调整返回良好的状态。
6.在上述第一形态的变速装置的控制装置中,可以是,所述驱动装置具备电磁阀,所述消除判定处理包括基于作为向所述电磁阀输入的所述输入信号的通电电流的表现来判定所述异常是否消除的处理。
7.根据上述结构的变速装置的控制装置,在电磁阀的驱动发生异常的情况下,通电电流的表现存在成为与正常时不同的表现的倾向。因此,在上述结构中,能够基于通电电流高精度地判定电磁阀的异常是否消除。
8.在上述第一形态的变速装置的控制装置中,所述电子控制单元可以具有操作处理,该操作处理在通过所述异常判定处理判定为存在所述异常的情况下,在所述车辆停止时,在将与所述异常对应的所述摩擦卡合元件维持为释放状态的条件下操作该摩擦卡合元件的驱动装置。
9.根据上述结构的变速装置的控制装置,在为了判定异常是否消除而操作与异常对应的摩擦卡合元件的驱动装置的条件中,加入了车辆停止的意旨的条件。因此,即使以操作为起因而万一摩擦卡合元件表示出意料外的表现,也能够抑制给车辆的行驶带来障碍的情况。
10.在上述第一形态的变速装置的控制装置中,可以包括存储装置,所述存储装置存储对映射进行规定的数据即映射数据。并且,所述电子控制单元可以构成为执行所述异常判定处理、所述失效保护处理、所述消除判定处理及所述解除处理。所述电子控制单元可以具有取得表示所述输入信号的表现的变量即表现变量的取得处理,并构成为执行该取得处理。所述映射可以将所述表现变量包含于输入变量并将表示所述异常是否消除的变量即消除变量包含于输出变量。所述消除判定处理可以包括向所述映射输入通过所述取得处理取得的所述表现变量的值并算出所述消除变量的值的处理。
11.在上述结构的变速装置的控制装置中,所述驱动装置具备电磁阀,所述输入变量包括作为所述表现变量的与所述电磁阀的通电电流的时序数据相关的变量。
12.通电电流的时序数据表示通电电流的表现,因此根据上述结构的变速装置的控制装置,能够通过该时序数据构成适当的表现变量。
13.在上述第一形态的变速装置的控制装置中,所述电子控制单元可以具有在通过所述异常判定处理判定为发生了异常的情况下确定所述异常的原因的确定处理,并构成为执行该确定处理。所述电子控制单元可以构成为以通过所述确定处理确定的异常是与所述摩擦卡合元件的卡合相关的异常为条件,执行所述消除判定处理。
14.变速装置的异常也包括例如以工作油的劣化为起因而无法适当地执行变速控制的异常等,在该情况下,由于希望替换工作油,因此不希望短期间内的自然的恢复。相对于此,关于与摩擦卡合元件的卡合相关的异常,包含异物的暂时性啮入等在短时间内自然消除的异常。因此,根据上述结构的变速装置的控制装置,通过确定处理来确定是与摩擦卡合元件的卡合相关的异常还是除此以外的异常,在是与摩擦卡合元件的卡合相关的异常的情况下,执行消除判定处理。由此,在上述结构中,能够抑制尽管发生无消除预期的异常但还是无用地执行消除判定处理的情况。
15.在上述结构的变速装置的控制装置中,所述电子控制单元可以具有警告处理和存储处理,所述警告处理在通过所述异常判定处理判定为发生了异常的情况下警告该情况,所述存储处理使与所述确定处理的确定结果相关的数据存储于存储装置,所述电子控制单元构成为执行所述警告处理和所述存储处理。
16.根据上述结构的变速装置的控制装置,由于在存储装置中存储确定结果,因此在接受警告处理而用户将车辆带入例如修理工厂等时,判断对该车辆进行何种处置的主体能够基于存储装置中存储的确定结果来决定处置。
17.在上述结构的变速装置的控制装置中,可以包括存储装置,所述存储装置构成为存储对映射进行规定的数据即映射数据。所述电子控制单元可以具有取得表示所述变速装
置的通电电流的表现的变量即表现变量的取得处理,并构成为执行该取得处理。所述映射可以将所述表现变量包含于输入变量并将表示所述异常的种类的变量即原因变量包含于输出变量。所述确定处理可以包括向所述映射输入通过所述取得处理取得的所述表现变量的值并算出所述原因变量的值的处理。
18.在上述结构的变速装置的控制装置中,所述变速装置可以具备电磁阀。所述输入变量可以包括作为所述表现变量的与所述电磁阀的通电电流的时序数据相关的变量。
19.通电电流的时序数据表示通电电流的表现,因此根据上述结构的变速装置的控制装置,能够通过该时序数据构成适当的表现变量。
20.在上述结构的变速装置的控制装置中,所述取得处理可以包括除了取得通过所述异常判定处理判定为存在异常时的所述表现变量的值之外,还取得该表现变量之前的定时的所述表现变量的值的处理。所述确定处理可以包括通过将利用所述取得处理取得的判定为存在所述异常时的所述表现变量的值和所述之前的定时的所述表现变量的值这双方向所述映射同时输入而算出所述原因变量的值的处理。
21.根据上述结构的变速装置的控制装置,将判定为存在异常之前的表现变量也加入到输入变量中,由此,能够根据输入信号的表现的历史、倾向来算出原因变量的值。
22.本发明的第二形态的变速装置的控制系统具备上述的变速装置的控制装置中的所述电子控制单元和所述存储装置。所述电子控制单元包括所述车辆具备的第一电子控制单元和所述车辆不具备的第二电子控制单元。所述驱动装置具备电磁阀。所述第一电子控制单元构成为至少执行所述异常判定处理、所述失效保护处理、所述解除处理以及发送与所述电磁阀的通电电流相关的数据的数据发送处理。所述第二电子控制单元构成为至少执行所述消除判定处理。
23.根据上述第二形态的变速装置的控制系统,通过利用第二电子控制单元执行消除判定处理,与利用第一电子控制单元执行的情况相比,能够减轻第一电子控制单元的运算负载。
24.本发明的第三形态的变速装置的控制系统具备上述的变速装置的控制装置中的所述电子控制单元和所述存储装置。所述电子控制单元包括所述车辆具备的第一电子控制单元和所述车辆不具备的第二电子控制单元。所述驱动装置具备电磁阀。所述第一电子控制单元构成为至少执行所述异常判定处理、所述失效保护处理、所述解除处理以及发送与所述电磁阀的通电电流相关的数据的数据发送处理。所述第二电子控制单元构成为至少执行所述确定处理。
25.根据上述第三形态的变速装置的控制系统,通过利用第二电子控制单元执行确定处理,与利用第一电子控制单元执行的情况相比,能够减轻第一电子控制单元的运算负载。
26.在上述结构的变速装置的控制系统中,所述第二电子控制单元可以构成为执行接收处理和更新处理,在所述接收处理中,接收通过多个所述车辆各自进行的所述数据发送处理而发送的数据,在所述更新处理中,通过将基于利用所述接收处理接收到的数据的所述输入变量向所述映射输入来算出所述输出变量的值,为了将该算出的值控制为目标值而更新所述映射数据。
27.根据上述结构的变速装置的控制系统,基于从多个车辆分别发送的数据来更新映射数据,由此能够成为在实际的车辆的行驶中更高精度地算出输出变量的值的数据。
28.本发明的第四形态的变速装置的变速装置具备上述变速装置的控制系统中的所述车辆具备的所述第一电子控制单元。
29.本发明的第五形态的车外运算装置具备上述变速装置的控制系统中的所述车辆之外具备的所述第二电子控制单元、及上述变速装置的控制系统中的所述车辆之外具备的所述存储装置。
附图说明
30.下面将参考附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,附图中类似的附图标记表示类似的元件,其中:
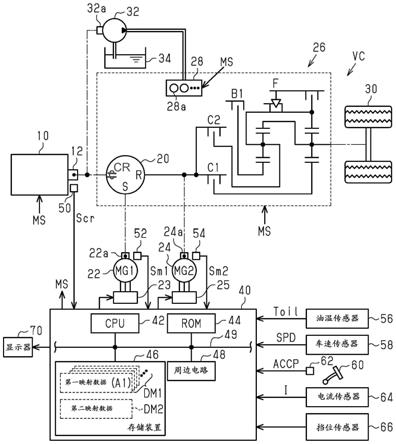
31.图1是表示本发明的第一实施方式的车辆的驱动系统及控制装置的结构的图。
32.图2是表示该第一实施方式的控制装置执行的处理的框图。
33.图3是表示该第一实施方式的控制装置执行的处理的次序的流程图。
34.图4是表示该第一实施方式的超出量的时间图。
35.图5是表示该第一实施方式的控制装置执行的处理的次序的流程图。
36.图6a是表示该第一实施方式的变速时的旋转速度的表现与异常原因的关系的时间图。
37.图6b是表示该第一实施方式的变速时的旋转速度的表现与异常原因的关系的时间图。
38.图6c是表示该第一实施方式的变速时的旋转速度的表现与异常原因的关系的时间图。
39.图6d是表示该第一实施方式的变速时的旋转速度的表现与异常原因的关系的时间图。
40.图7是定义该第一实施方式的输出变量的图。
41.图8是表示该第一实施方式的控制装置执行的处理的次序的流程图。
42.图9是表示本发明的第二实施方式的系统的结构的图。
43.图10a是表示该第二实施方式的系统执行的处理的次序的流程图。
44.图10b是表示该第二实施方式的系统执行的处理的次序的流程图。
45.图11a是表示该第二实施方式的系统执行的处理的次序的流程图。
46.图11b是表示该第二实施方式的系统执行的处理的次序的流程图。
具体实施方式
47.以下,参照附图,说明第一实施方式。如图1所示,在内燃机10的曲轴12上机械式连结有动力分配装置20。动力分配装置20对内燃机10、第一电动机/发电机22、及第二电动机/发电机24的动力进行分配。动力分配装置20具备行星齿轮机构,在行星齿轮机构的轮架cr上机械式连结有曲轴12,在太阳齿轮s上机械式连结有第一电动机/发电机22的旋转轴22a,在齿圈r上机械式连结有第二电动机/发电机24的旋转轴24a。需要说明的是,向第一电动机/发电机22的端子施加第一逆变器23的输出电压。而且,向第二电动机/发电机24的端子施加第二逆变器25的输出电压。
48.在动力分配装置20的齿圈r,除了第二电动机/发电机24的旋转轴24a之外,还经由
变速装置26机械式连结有驱动轮30。而且,在轮架cr上机械式连结有油泵32的从动轴32a。油泵32是使油盘34内的油作为润滑油向动力分配装置20循环或者使该油作为工作油向变速装置26排出的泵。需要说明的是,从油泵32排出的工作油由变速装置26内的油压控制电路28调整其压力而被作为工作油利用。油压控制电路28是具备多个电磁阀28a,通过上述各电磁阀28a的通电而控制工作油的流动状态或工作油的油压的电路。
49.控制装置40以内燃机10为控制对象,为了控制作为其控制量的转矩或排气成分比率等而对内燃机10的各种操作部进行操作。而且,控制装置40以第一电动机/发电机22为控制对象,为了控制作为其控制量的转矩或旋转速度等而对第一逆变器23进行操作。而且,控制装置40以第二电动机/发电机24为控制对象,为了控制作为其控制量的转矩或旋转速度等而对第二逆变器25进行操作。
50.控制装置40在控制上述控制量时,参照曲轴角传感器50的输出信号scr、检知第一电动机/发电机22的旋转轴22a的旋转角的第一旋转角传感器52的输出信号sm1、以及检知第二电动机/发电机24的旋转轴24a的旋转角的第二旋转角传感器54的输出信号sm2。而且,控制装置40参照由油温传感器56检测的作为油的温度的油温toil、由车速传感器58检测的车速spd、以及由加速传感器62检测的作为加速踏板60的踏入量的加速操作量accp。而且,控制装置40参照由电流传感器64检测的在电磁阀28a中流动的电流i、以及由挡位传感器66检测的挡位。需要说明的是,电流传感器64实际上包含检测多个电磁阀28a的各自电流的多个专用的传感器。
51.控制装置40具备由cpu42和rom44构成的电子控制单元(ecu)、能够电气性地改写的作为非易失性存储器的存储装置46、及周边电路48,它们经由局域网49能够通信。在此,周边电路48包括生成对内部的动作进行规定的时钟信号的电路、电源电路、复位电路等。控制装置40通过cpu42执行rom44中存储的程序而对控制量进行控制。
52.图2示出控制装置40执行的处理的一部分。图2所示的处理通过cpu42例如以规定周期反复执行rom44中存储的程序来实现。
53.变速比指令值设定处理m10基于加速操作量accp及车速spd,设定作为变速比的指令值的变速比指令值vsft*。油压指令值设定处理m12在变速比的切换时,基于加速操作量accp、油温toil、变速比指令值vsft*及切换变量δvsft,设定在切换中使用的由电磁阀调整的作为油压的指令值的基础值的油压指令值p0*。在此,切换变量δvsft表示变速比的切换是升挡还是降挡。因此,当变速比指令值vsft*表示3速且切换变量δvsft为升挡时,表示变速的种类是从3速向4速的切换。油压指令值设定处理m12通过在以加速操作量accp、变速的种类、油温toil为输入变量并以油压指令值p0*为输出变量的映射数据预先存储于rom44的状态下利用cpu42对油压指令值p0*进行映射运算来实现。需要说明的是,映射数据是输入变量的离散性的值和与输入变量的值分别对应的输出变量的值的组数据。而且,映射运算只要设为下述处理即可:例如在输入变量的值与映射数据的输入变量的值的任一个一致的情况下,将对应的映射数据的输出变量的值作为运算结果,相对于此,在不一致的情况下,将通过映射数据包含的多个输出变量的值的插补而得到的值作为运算结果。
54.详细而言,油压指令值p0*是图2所示的阶段(phase)1、阶段2及阶段3的各自的值。在此,阶段1是从发出变速比的切换指令至经过预先确定的规定时间为止的期间。阶段2是转矩相的结束为止的期间,阶段3是变速比的切换完成为止的期间。需要说明的是,关于阶
段3,映射数据的输出变量的值实际上设为油压指令值p0*的上升速度。
55.学习补正量算出处理m14是基于作为第二电动机/发电机24的旋转轴24a的旋转速度nm2与成为基准的旋转速度nm2*之差的超出量(blow amounts)δnm2,算出对油压指令值p0*进行补正的补正量δp的处理。在此,旋转速度nm2通过cpu42基于第二旋转角传感器54的输出信号sm2算出。而且,cpu42以变速的种类及车速spd为输入而设定成为基准的旋转速度nm2。该处理能够通过在以变速的种类及车速spd为输入变量且以成为基准的旋转速度nm2*为输出变量的映射数据预先存储于rom44的状态下,利用cpu42对旋转速度nm2*进行映射运算而实现。
56.补正处理m16是通过将油压指令值p0*加上补正量δp而算出油压指令值p*的处理。电流转换处理m18是将油压指令值p*转换成在电磁阀28a中流动的电流的指令值(电流指令值i*)的处理。
57.控制装置40在变速比指令值vsft*的值变化的情况下,通过使电流指令值i*如图2所示按照各阶段变化而将摩擦卡合元件从释放状态切换为连结状态。需要说明的是,关于与从连结状态切换为释放状态的摩擦卡合元件对应的油压指令值或电流指令值,也只要设为上述同样的基于映射数据的映射运算即可。
58.图3示出控制装置40执行的处理的次序。图3所示的处理通过cpu42以例如规定周期反复执行rom44中存储的程序来实现。需要说明的是,以下,通过最前头附有“s”的数字表示各处理的步骤编号。
59.在图3所示的一连串的处理中,cpu42首先判定是否为变速比的切换控制时(s10)。并且,cpu42在判定为切换控制时的情况下(s10:是),取得加速操作量accp、变速比指令值vsft*、切换变量δvsft及油温toil(s12)。而且,cpu42算出伴随本次切换而从释放状态切换为连结状态的摩擦卡合元件的切换用的电磁阀28a中流动的电流i与电流指令值i*之差即电流偏差δi,并将其存储于存储装置46(s14)。
60.接下来,cpu42判定从发出变速指令起是否经过了规定期间(s16)。在此,规定期间根据为完成变速控制所设想的时间的最大值来设定。并且,cpu42在判定为还未经过规定期间的情况下(s16:否),判定第二电动机/发电机24的旋转轴24a的旋转速度nm2与成为基准的旋转速度nm2*之差的绝对值成为阈值δnm2th以上的状态是否持续了规定时间(s20)。该处理是判定变速控制是否发生了异常的处理。
61.即,在变速控制发生异常的情况下,产生变速装置26的输入侧的旋转速度较大地上升的事态等,因此如图4的单点划线所示,产生曲轴12的旋转速度ne、第二电动机/发电机24的旋转轴24a的旋转速度nm2上升的现象。需要说明的是,图4示出旋转速度ne、nm1、nm2、转矩指令值trqm1*、trqm2*的推移、及工作油压pc2、pc1和它们的指令值pc2*、pc1*的推移。在此,旋转速度ne是曲轴12的旋转速度,旋转速度nm1是第一电动机/发电机22的旋转轴22a的旋转速度。而且,转矩指令值trqm1*是对于第一电动机/发电机22的转矩指令值,转矩指令值trqm2*是对于第二电动机/发电机24的转矩指令值。而且,工作油压pc2及工作油压pc1是在图4所示的变速中设想的摩擦卡合元件中的连结侧的元件的工作油压及释放侧的元件的工作油压。
62.指令值pc2*、pc1*被设定成抑制产生变速装置26的输入侧的旋转速度上升等现象。并且,通过该设定,确定成为变速时的基准的旋转速度nm2*。
63.返回图3,cpu42在判定为持续了规定时间以上的情况下(s20:是),作出存在异常的临时判定(s22)。cpu42在完成s22的处理的情况下或在s20的处理中作出否定判定的情况下,返回s14的处理。
64.另一方面,cpu42在判定为经过了规定期间的情况下(s16:是),判定变速是否未完成(s18)。在此,cpu42只要在实际的变速比未成为变速比指令值vsft*的情况下判定为变速未完成即可。cpu42在判定为变速未完成的情况下(s18:否),作出存在异常的判定(s24)。
65.相对于此,cpu42在判定为变速完成的情况下(s18:是),判定是否作出了临时异常判定(s25)。并且,cpu42在判定为作出了临时异常判定的情况下(s25:是),将计数器c增加“1”(s26)。然后,cpu42判定计数器c的值是否为比“1”大的规定值cth以上(s28)。cpu42在判定为规定值cth以上的情况下(s28:是),向s24的处理转移。cpu42在完成s24的处理的情况下,执行将变速比固定为规定的变速比的失效保护处理并向失效标志f代入“0”(s30)。这里的规定的变速比是将在发生了异常时应为连结状态的摩擦卡合元件设为释放状态的变速比。而且,失效标志f是在执行失效保护处理时成为“0”,在除此以外时成为“1”的标志。
66.另外,cpu42执行操作图1所示的显示器70而使存在异常的意旨的视觉信息显示于显示器70的警告处理(s32)。并且,cpu42将表示作出异常判定的意旨的数据、发生了异常时的加速操作量accp、变速比指令值vsft*、切换变量δvsft及油温toil存储于存储装置46(s34)。
67.需要说明的是,cpu42在完成s34的处理的情况下或在s10、s25、s28的处理中作出否定判定的情况下,暂时结束图3所示的一连串的处理。图5示出控制装置40执行的另一处理的次序。图5所示的处理通过cpu42例如以规定周期反复执行rom44中存储的程序来实现。
68.在图5所示的一连串的处理中,cpu42首先判定是否通过图3所示的处理作出了异常判定(s40)。并且,cpu42在作出了异常判定的情况下(s40:是),读出在图3所示的s34的处理中存储于存储装置46的加速操作量accp、变速比指令值vsft*及切换变量δvsft(s42)。并且,cpu42基于发生了异常时的加速操作量accp和变速的种类,从图1所示的存储装置46存储的第一映射数据dm1之中选择并读出相应的第一映射数据dm1(s44)。即,在存储装置46中,存储有与根据图2所示的油压指令值设定处理m12确定油压指令值p0*的加速操作量accp及变速的种类而被分配的区域a1、a2、
…
、a7、b1、
…
分别对应的各不相同的第一映射数据dm1。
69.接下来,cpu42读出在图3所示的s14的处理中存储的作为电流偏差δi的时序数据的电流偏差δi(1)、δi(2)、
…
、δi(n)(s46)。电流偏差δi(1)、δi(2)、
…
、δi(n)是作出存在异常的意旨判定时的变速比的切换期间的电流偏差δi的时序数据。电流偏差δi的时序数据是与异常的原因存在相关的数据。
70.图6a~图6d示出变速时的电流i、工作油压pc2、及旋转速度nm2超过成为基准的旋转速度nm2*的量即超出量δnm2的推移。需要说明的是,在图6a~图6d的各自的右侧示出超出量δnm2的6个采样值。在此,图6a是正常时的推移例,图6b~图6d是异常时的推移例。
71.详细而言,图6b示出由于空气混入电磁阀28a并因反馈控制而在工作油压pc2的控制中发生异常,旋转速度nm2作出与正常时不同的表现的例子。此时的实际电流的表现与正常时不同。而且,图6c示出异物混入电磁阀28a而发生了阀暂时无法动作的异常即暂时钉住(temporary stick)的情况。在该情况下,以工作油压pc2的上升暂时减缓为起因而使超出
量δnm2暂时超过阈值nm2th。而且,此时的电流i的表现与图6b的情况不同。图6d示出异物混入电磁阀28a而发生了阀无法常规地进行动作的异常即完全钉住的情况。在该情况下,由于工作油压pc2低而无法将摩擦卡合元件形成为连结状态,超出量δnm2超过阈值nm2th的状态继续。并且,该情况下的电流i的表现也与图6b不同。
72.返回图5,cpu42在判定为异常发生之前,在作出了与发生异常时相同的变速比的切换的期间,读出在图3的s14的处理中存储的电流偏差δi的时序数据即电流偏差δi(
‑
p+1)、δi(
‑
p+2)、
…
、δi(
‑
p+n)(s48)。需要说明的是,在此,“与发生了异常时相同的变速比的切换”是指变速的种类及加速操作量accp处于图2所示的油压指令值p0*的设定所使用的区域a1、a2、
…
中的与发生了异常时相同的区域的情况。需要说明的是,更优选还增加与发生了异常时的油温toil之差的绝对值为规定值以下的意旨的条件。
73.接下来,cpu42在向由通过s44的处理选择的第一映射数据dm1规定的映射输入的输入变量x(1)~x(2n)中代入通过s46、s48的处理取得的时序数据(s50)。即,作为“i=1~n”,向输入变量x(i)代入电流偏差δi(i),向输入变量x(n+i)代入电流偏差δi(
‑
p+i)。
74.接下来,cpu42在由通过s44的处理选择的第一映射数据dm1规定的映射中代入输入变量x(1)~x(2n)的值,由此算出输出变量y(1)、y(2)、
…
、y(q)的值(s52)。
75.在本第一实施方式中,例示函数逼近器作为映射,详细而言,例示中间层为一层的全连接正向传播型的神经网络。具体而言,关于通过s50的处理被代入了值的输入变量x(1)~x(2n)和作为偏置参数的x(0),通过将利用由系数wfjk(j=1~m、k=0~2n)规定的线性映射转换后的“m”个值分别代入激活函数f,来确定中间层的节点的值。而且,通过利用由系数wsij规定的线性映射将中间层的节点的值分别转换后的值被分别代入激活函数g,来确定输出变量y(1)、y(2)、y(3)、
…
的值。需要说明的是,在本第一实施方式中,作为激活函数(activation function)f,例示双曲线正切函数(双曲正切(hyperbolic tangent))。而且,作为激活函数g,例示成为平滑的曲线且一个输出值成为最大的归一化指数函数(softmax function)。
76.如图7所示,输出变量y(1)、y(2)、y(3)、
…
成为确定异常的原因的原因变量。图7中示出输出变量y(1)表示图6b所示的空气混入发生的概率,输出变量y(2)表示图6c所示的暂时钉住发生的概率,输出变量y(3)表示图6d所示的完全钉住发生的概率的情况。
77.返回图5,cpu42选择输出变量y(1)~y(q)中的最大值ymax(s54)。并且,cpu42基于输出变量y(1)~y(q)中的与最大值ymax相等的输出变量,确定异常的原因,并将原因的确定结果存储于存储装置46(s56)。例如cpu42在输出变量y(1)的值与最大值ymax相等的情况下,将作出了异常判定的原因为发生空气混入的情况存储于存储装置46。
78.需要说明的是,cpu42在s56的处理完成的情况下或通过s40的处理作出否定判定的情况下,暂时结束图6a~图6d所示的一连串的处理。需要说明的是,第一映射数据dm1分别是在车辆vc出厂前,将通过驾驶试制车等而得到的电流偏差δi和表示有无实际异常的数据作为训练数据进行了学习的学习完模型。
79.图8示出控制装置40执行的另一处理的次序。图8所示的处理通过cpu42例如以规定周期反复执行rom44中存储的程序来实现。
80.在图8所示的一连串的处理中,cpu42首先判定失效标志f是否为“0”(s60)。cpu42在判定为失效标志f为“0”的情况下(s60:是),判定失效标志f为“0”的原因是否为暂时钉住
(s62)。即,判定输出变量y(2)是否为最大值ymax。cpu42在判定为暂时钉住的情况下(s62:是),判定是否为以d挡处于停止中(s64)。并且,cpu42在判定为以d挡处于停止中的情况下(s64:是),执行使微小的电流流过发生了暂时钉住的电磁阀28a并通过使该电流增减而使电磁阀28a微小地振动的颤振控制(s66)。并且,cpu42检测发生了暂时钉住的电磁阀28a的电流i(s68)。
81.并且,cpu42从在s64的处理中作出肯定判定至经过规定期间为止,以规定的采样周期持续进行电流i的检测(s70:否)。规定期间设定为具有以得到电流i的波形信息的方式预先确定的长度的时间。cpu42在判定为经过了规定期间的情况下(s70:是),将在规定期间通过s68处理检测到的时序数据即电流i(1)、i(2)、
…
i(n)代入由图1所示的存储装置46中存储的第二映射数据dm2规定的映射的输入变量x(1)~x(n)(s72)。
82.并且,cpu42通过向由第二映射数据dm2规定的映射代入输入变量x(1)~x(n)的值来算出输出变量z的值(s74)。在本第一实施方式中,例示函数逼近器作为映射,详细而言,例示中间层为一层的全连接正向传播型的神经网络。具体而言,关于通过s72的处理代入了值的输入变量x(1)~x(n)和作为偏置参数的x(0),通过将利用由系数wojk(j=1~m、k=0~n)规定的线性映射转换后的“m”个值分别代入激活函数h,来确定中间层的节点的值。而且,通过利用由系数wtij规定的线性映射将中间层的节点的值分别转换后的值被分别代入激活函数u,来确定输出变量z的值。需要说明的是,在本第一实施方式中,作为激活函数h,例示双曲正切。而且,作为激活函数u,例示logistic sigmoid函数。
83.第二映射数据dm2是在车辆vc出厂前,使用与车辆vc同一规格的车辆的变速装置26,将发生异常时和未发生异常时的各自的颤振控制时的电流i作为训练数据进行学习的学习完模型。此时,输出变量z的目标值在未发生异常的情况下设为“1”,在发生异常的情况下设为“0”。
84.并且,cpu42判定输出变量z的值是否为阈值zth以上(s76)。该处理是判定异常是否消除的处理。cpu42在判定为阈值zth以上的情况下(s76:是),认为异常消除,解除失效保护处理(s78)。而且,cpu42向失效标志f代入“1”(s80)。
85.需要说明的是,cpu42在完成s80的处理的情况下或在s60、s62、s64、s76的处理中作出否定判定的情况下,暂时结束图8所示的一连串的处理。在此,说明本第一实施方式的作用及效果。
86.cpu42基于变速比的切换期间的旋转速度nm2与成为基准的旋转速度nm2*之差的绝对值为阈值δnm2th以上的情况,判定为变速控制发生了异常。cpu42在判定为发生了异常的情况下,执行失效保护处理并向用户进行发生了异常的意旨警告。而且,cpu42在判定为发生了异常的情况下,基于对于发生了异常的电磁阀28a执行颤振控制时的通电电流的表现,判定异常是否消除。即,颤振控制是使电磁阀28a微小地振动的控制,但是在暂时钉住等异常未消除的情况下,实际上电磁阀28a不振动。并且,根据电磁阀28a是否振动,电磁阀28a的通电电流的表现不同。cpu42在判定为异常消除的情况下,解除失效保护处理。由此,在发生了短时间内消除的异常的情况下,能够使基于变速装置26的变速比迅速地返回使驾驶性能等良好的值。
87.根据以上说明的本第一实施方式,还能得到以下记载的效果。
88.(1)由第二映射数据dm2规定的映射的输入变量包含电磁阀28a的电流i的时序数
据。由此,能够将与电磁阀28a的通电电流的表现相关的变量即表现变量作为输入变量,因此能够高精度地判定电磁阀28a的异常是否消除。
89.(2)在判定为发生了异常的情况下,以异常的原因为暂时钉住的情况为条件,执行了颤振控制的基于通电电流的表现的异常是否消除的判定。由此,能够抑制尽管发生无消除预期的异常但还是无用地执行消除判定处理的情况。
90.(3)以车辆在d挡停止的情况为条件,执行了颤振控制。由此,即使以颤振控制为起因而万一摩擦卡合元件显示出意料外的表现,也能够抑制给车辆vc的行驶带来障碍的情况。
91.(4)cpu42在判定为发生了异常的情况下,基于发生了异常时的电磁阀28a的通电电流的表现,确定异常的原因,并将确定结果存储于存储装置46。由此,在用户接受到警告处理而将车辆带入例如修理工厂等时,判断对该车辆进行何种处置的主体能够基于存储于存储装置46的确定结果来决定处置。
92.(5)将向由第一映射数据dm1规定的映射输入的输入变量取代电流i而设为电流偏差δi。在本第一实施方式的情况下,基于补正量δp来补正油压指令值p0*,因此即使根据加速操作量accp及变速的种类而划分的区域相同,电流指令值i*也根据补正量δp而变化。而且,即使根据加速操作量accp及变速的种类而划分的区域相同且油温toil相同,电流指令值i*也会通过映射运算而变动。因此,电流i的表现虽然根据电流指令值i*而变动,但是这与异常没有直接关系。因此,通过取代使用电流i而使用电流偏差δi,能够抑制由于电流指令值i*的变化而输入变量x变化的情况。这样,通过将成为异常的原因的信息作为特征量进行加工而作为向映射的输入,能够更高精度地算出输出变量的值。
93.(6)向由第一映射数据dm1规定的映射输入的输入变量包含电流偏差δi的时序数据。时序数据表示电磁阀28a的通电电流的表现,因此在本第一实施方式中,能够将表示电磁阀28a的通电电流的表现的变量设为输入变量。
94.(7)在向由第一映射数据dm1规定的映射同时输入的输入变量中,除了基于变速装置26的变速比的本次的切换期间内的电流偏差δi(1)~δi(n)之外,还包含过去作出了相同切换时的电流偏差δi(
‑
p+1)~δi(
‑
p+n)。由此,能够根据电流的表现历史、倾向算出原因变量的值。
95.以下,关于本发明的第二实施方式,以与第一实施方式的不同点为中心参照附图进行说明。
96.图9示出本第二实施方式的系统的结构。需要说明的是,在图9中,关于与图1所示的构件对应的构件,为了简便起见,标注同一附图标记而省略其说明。如图9所示,车辆vc(1)的控制装置40具备通信机47,能够通过通信机47并经由外部的网络80而与数据解析中心90通信。
97.数据解析中心90将从多个车辆vc(1)、vc(2)、
…
发送的数据收集作为大数据db进行解析。数据解析中心90具备cpu92、rom94、存储装置96及通信机97,它们能够经由局域网99通信。需要说明的是,存储装置96是能够电气性地改写的非易失性的装置,除了大数据db之外,还存储有第一映射数据dm1及第二映射数据dm2。
98.图10a和图10b示出图9所示的系统执行的、与基于输出变量z的失效保护处理的解除相关的处理的次序。详细而言,图10a所示的处理通过cpu42例如以规定周期反复执行
rom44中存储的程序来实现。而且,图10b所示的处理通过cpu92例如以规定周期反复执行rom94中存储的程序来实现。需要说明的是,在图10a和图10b所示的处理中,关于与图8所示的处理对应的处理,为了简便起见,标注相同的步骤编号而省略其说明。以下,按照与失效保护处理的解除相关的处理的时序说明图10a和图10b所示的一连串的处理。
99.在图10a所示的一连串的处理中,cpu42首先执行s60~s70的处理,之后,通过对通信机47进行操作,将由s68的处理检测到的电流i的时序数据与车辆的辨别记号一起发送(s90)。
100.相对于此,如图10b所示,数据解析中心90的cpu92将时序数据与车辆的辨别记号一起接收(s100)。并且,cpu92执行s72、s74的处理。并且,cpu92通过对通信机47进行操作,将与通过s74的处理算出的输出变量z的值相关的数据向通过s100的处理接收到的数据的发送源发送(s102)。
101.相对于此,如图10a所示,cpu42接收与输出变量z的值相关的数据(s92)。并且,cpu在判定为输出变量z的值为阈值zth以上的情况下(s76:是),执行s78、s80的处理。另一方面,cpu42在判定为输出变量z的值小于阈值zth的情况下(s76:否),将计数器c增值(s94)。接下来,cpu42判定计数器c是否为规定值cth以上(s96)。该处理是用于判定为暂时钉住的判定的可靠性是否低的处理。并且,cpu42在判定为规定值cth以上的情况下(s96:是),通过操作通信机47而通知为暂时钉住的判定的可靠性低的意旨(s98)。
102.需要说明的是,cpu42在s80、s98的处理完成的情况下或在s60、s62、s64、s96的处理中作出否定判定的情况下,暂时结束图10a所示的一连串的处理。
103.另一方面,如图10b所示,cpu92判定为暂时钉住的意旨的判定的可靠性低的意旨的反馈是否存在(s104)。并且,在判定为存在反馈的情况下(s104:是),接收与反馈相关的数据(s106)。在此接收的数据包含执行了s98的处理的车辆的辨别记号、与发生了异常的电磁阀28a的种类相关的数据等。
104.需要说明的是,cpu92在完成s106的处理的情况下或在s104的处理中作出否定判定的情况下,暂时结束图10b所示的一连串的处理。图11a和图11b示出基于输出变量y(1)、y(2)、
…
的异常原因的判定处理的次序。
105.详细而言,图11a所示的处理通过cpu42例如以规定周期反复执行rom44中存储的程序来实现。而且,图11b所示的处理通过cpu92例如以规定周期反复执行rom94中存储的程序来实现。需要说明的是,在图11a和图11b所示的处理中,关于与图5所示的处理对应的处理,为了简便起见,标注相同的步骤编号而省略其说明。以下,按照基于输出变量y(1)、y(2)、
…
的异常的原因的判定处理的时序说明图11a和图11b所示的一连串的处理。
106.如图11a所示,控制装置40的cpu42在执行s40、s42、s46、s48的处理时,通过操作通信机47而将在s42、46、s48的处理中读出的数据(s110)与车辆vc(1)的辨别记号一起发送。
107.相对于此,如图11b所示,数据解析中心90的cpu92接收通过s90的处理发送的数据和辨别记号(s120)。并且,cpu92使用接收到的数据执行s44、s50~s54的处理。并且,cpu92操作通信机97而向通过s120的处理接收到的数据的发送源发送与基于输出变量y(1)~y(q)中的成为最大值ymax的变量的异常原因的判定结果相关的数据,并将该数据存储于存储装置96(s122)。
108.相对于此,如图11a所示,cpu42接收与通过s122的处理而发送的判定结果相关的
数据(s112)。并且,cpu42将判定结果存储于存储装置46(s114)。
109.需要说明的是,cpu42在完成s114的处理的情况下或在s40的处理中作出否定判定的情况下,暂时结束图11a所示的一连串的处理。由此,用户根据图3的s32的警告处理而将车辆vc(1)带入修理工厂时,在修理工厂中,通过访问存储装置46能够获知异常的原因。但是,在例如尽管存储有为固定钉住的判定结果但变速控制的异常消除等情况下,在修理工厂中确定异常原因。并且,在判明判定结果不妥当的情况下,从修理工厂向数据解析中心90进行该意旨的反馈。
110.相对于此,如图11b所示,数据解析中心90的cpu92判定是否被进行来自修理工厂的反馈或图10a的s98的处理的反馈(s124)。并且,cpu92在判定为进行了反馈的情况下(s124:是),以输入作出误判定时的输入变量x(1)~x(2n)的值之际的由第一映射数据dm1规定的映射的输出变量的值表示通过反馈通知的正确的异常原因的方式更新第一映射数据dm1(s126)。
111.需要说明的是,cpu92在完成s126的处理的情况下或在s124的处理中作出否定判定的情况下,暂时结束图11b所示的一连串的处理。这样,根据本第二实施方式,通过在车辆vc(1)的外部进行s52、s74的处理,能够减轻cpu42的运算负载。而且,在基于s52~s54的处理的原因的判定结果错误的情况下,能够对第一映射数据dm1进行更新。特别是在车辆vc(1)、vc(2)、
…
的出厂后,对于根据各种用户在各种驾驶状况下产生的异常,能够验证使用了由第一映射数据dm1规定的映射的原因的判定结果。
112.本发明与上述实施方式中的事项的对应关系如下所述。以下,按照“发明内容”一栏记载的顺序示出对应关系。“摩擦卡合元件”的一例是离合器c1、c2及制动器b1。“异常判定处理”的一例是s16~s28的处理。“失效保护处理”的一例是s30的处理。“消除判定处理”的一例是s76的处理。“解除处理”的一例是s78的处理。“控制装置”的一例是控制装置40。“操作处理”的一例是s66的处理。“存储装置”的一例是存储装置46、96。“存储处理”的一例是s34、s56或s114的处理。“第一电子控制单元”的一例是cpu42及rom44。“第二电子控制单元”的一例是cpu92或rom94。“映射数据”的一例是第二映射数据dm2。“取得处理”的一例是s46、s48或s68的处理。“确定处理”的一例是s50~s54的处理。“警告处理”的一例是s32的处理。“之前的定时的表现变量”的一例是电流偏差δi(
‑
p+1)、δi(
‑
p+2)、
…
、δi(
‑
p+n)。“数据发送处理”的一例是s90或s110的处理。“接收处理”的一例是s120的处理。“更新处理”的一例是s126的处理。“车外运算装置”的一例是数据解析中心90。
113.需要说明的是,本实施方式可以如以下那样变更而作为其他实施方式实施。本实施方式及以下的其他实施方式在技术上不矛盾的范围内可以相互组合实施。
114.接下来,说明选择处理。
115.在上述实施方式中,将表示向驱动轮30施加的转矩的变量即转矩变量设为加速操作量accp,但是并不局限于此。例如,可以算出根据加速操作量accp确定的驱动转矩的指令值,通过转矩的指令值构成转矩变量。
116.在上述实施方式中,例示了具备与转矩变量及变速的种类对应的互不相同的多个第一映射数据dm1(a1)、dm1(a2)、
…
,选择其中的一个作为在输出变量y(1)、y(2)、
…
的值的算出中使用的映射数据的处理,但是并不局限于此。例如,可以具备与变速的种类无关而与转矩变量对应的互不相同的多个第一映射数据,根据转矩变量而选择其中的一个作为在输
出变量y(1)、y(2)、
…
的值的算出中使用的映射数据。而且,例如,也可以具备与转矩变量无关而与变速的种类对应的互不相同的多个第一映射数据,根据变速的种类而选择其中的一个作为在输出变量y(1)、y(2)、
…
的值的算出中使用的映射数据。
117.作为选择处理,并不局限于根据转矩变量和变速的种类这两个变量中的至少一个来选择互不相同的多个第一映射数据dm1中的一个的处理。例如,也可以是根据油温toil而选择互不相同的多个第一映射数据dm1中的一个的处理。这能够通过具备与转矩变量及变速的种类无关而与油温toil对应的互不相同的多个第一映射数据dm1来实现。不过,也可以设为具备与转矩变量及变速的种类这两个变量中的至少一个变量及油温toil对应的互不相同的多个第一映射数据dm1,对应于此,选择互不相同的多个第一映射数据dm1中的一个的处理。
118.需要说明的是,作为各区域的第一映射数据dm1,并不局限于设定为油压指令值不同的值的各区域的数据。例如也可以将油压指令值相同的区域分割成多个而在这些分割的各区域具备互不相同的映射数据。在该情况下,在映射进一步受到限定的状况下只要以输出适当的输出变量的值的方式进行学习即可,因此例如虽然中间层的层数小但是能够高精度地算出输出变量的值,或者虽然输入变量的维度小但是能够高精度地算出输出变量的值。
119.接下来,说明指令值。
120.在上述实施方式中,按照根据加速操作量accp、变速的种类、油温toil而被分割的各区域来确定油压指令值,但是并不局限于此。例如,关于上述三个变量,可以按照仅基于它们中的两个而被分割的各区域来确定油压指令值。而且,例如,关于上述三个变量,也可以按照仅基于它们中的一个而被分割的各区域来确定油压指令值。
121.并非必须通过学习处理来对油压的指令值进行补正。
122.接下来,关于作为向由第一映射数据dm1规定的映射输入的输入变量的表现变量,在上述实施方式中,关于作为向由第一映射数据dm1规定的映射输入的输入变量的电流变量,例示了电流偏差δi,但是并不局限于此。例如,也可以是电流i自身。即使在该情况下,也不用例如关于上述的指令值像所说明的那样通过学习处理补正油压指令值,并且,如关于上述的选择处理所说明的那样,当具备与加速操作量accp、变速的种类及油温toil对应的互不相同的多个映射数据时,能够通过电流i自身高精度地算出输出变量的值。不过,在使用电流i自身的情况下,在利用任意的映射数据的区域,油压指令值变化的量小的情况并非必须。
123.在上述实施方式中,除了异常时的时序数据之外,还通过异常即将发生之前的一次的变速期间的时序数据构成作为向映射输入的输入变量的表现变量,但是并不局限于此。例如,可以除了异常时的时序数据之外还通过在异常发生之前且与最近相比过去的一次的变速期间中的时序数据构成。而且,例如,也可以除了异常时的时序数据之外还通过发生异常之前的多个变速期间中的时序数据构成。
124.作为向由第一映射数据dm1规定的映射输入的输入变量的表现变量并非必须包含发生异常之前的变速期间中的时序数据。
125.向由第一映射数据dm1规定的映射输入的输入变量可以包含旋转速度nm2、超出量δnm2的时序数据。
126.接下来,说明向由第二映射数据dm2规定的映射输入的输入变量。
127.作为向由第二映射数据dm2规定的映射输入的输入变量,并不局限于电流i的时序数据。例如,也可以设定颤振控制时的基准电流,设为与其的偏差的时序数据。不过,并不局限于与通电电流的时序数据相关的变量,例如,可以设为电流的振幅及周期。
128.接下来,说明异常判定处理。
129.在上述实施方式中,在s20的处理中作出肯定判定的情况下且在规定期间内完成变速的情况下,在计数器c成为阈值cth以上的情况下作出存在异常的意旨判定,但是并不局限于此。例如,可以在s20的处理中作出肯定判定的情况下,无论在规定期间内是否完成变速都作出存在异常的意旨判定。
130.接下来,说明消除判定处理。
131.作为消除判定处理,并不局限于利用通过机械学习进行了学习后的学习完模型的处理。例如,可以基于在使电流指令值变化之际在电磁阀28a中实际流动的电流i变化规定以上所需的时间等来判定是否消除。此外,与发生钉住时消除的情况相比,电流i变化规定以上所需的时间存在变长的倾向。
132.暂时钉住消除的意旨的判定结果仅利用于解除失效保护处理的处理,但是并不局限于此。例如,也可以利用于将异常消除的意旨向用户通知的处理。
133.接下来,说明警告处理。
134.在上述实施方式中,例示了将显示器70作为警告装置,显示发生了异常的意旨的视觉信息的处理,但是并不局限于此。例如,也可以设为将扬声器作为警告装置,输出发生了异常的意旨的听觉信息的处理。
135.接下来,说明存储处理。
136.在上述实施方式中,将存储输出变量的算出结果的存储装置设为与存储第一映射数据dm1的存储装置相同,但是并不局限于此。
137.即使在车辆vc内算出输出变量y(1)、y(2)、
…
的情况下,也不是必须执行存储处理。例如,可以不执行存储处理而替代地执行将算出结果向车辆vc的制造厂商或数据解析中心90等发送的处理。
138.接下来,说明车辆用控制系统。
139.在上述实施方式中,将算出输出变量y(1)、y(2)、
…
的值的主体和算出输出变量z的值的主体设为同一主体的数据解析中心90,但是并不局限于此。例如,关于输出变量z,可以在车辆vc侧算出。而且,例如,可以通过与数据解析中心90不同的车辆vc的外部的装置算出。
140.在上述实施方式中,将更新第一映射数据dm1的情况作为目标之一,通过数据解析中心90算出了输出变量y(1)、y(2)、
…
的值,但是并不局限于此。例如,即使在不更新第一映射数据dm1的情况下,当在车辆vc的外部算出输出变量y(1)、y(2)、
…
的值时,也能够减轻cpu42的运算负载。
141.作为为了算出输出变量y(1)、y(2)、
…
的值而发送的、基于电流传感器的检测值的数据,并不局限于如电流偏差δi那样设为输入变量x(1)、x(2)、
…
的数据。例如,也可以为电流i。即使在该情况下,通过将例如加速操作量accp、变速的种类、油温toil等在算出电流指令值i*的基础上所需的变量的值向数据解析中心90发送,也能够在数据解析中心90算出
电流偏差δi。
142.作为车辆vc发送为了算出输出变量y(1)、y(2)、
…
的值而所需的基于传感器的检测值的数据的发送目的地,并不局限于执行算出输出变量y(1)、y(2)、
…
的值的处理的主体。例如,也可以将存储大数据db的数据中心与算出输出变量y(1)、y(2)、
…
的值的解析中心分开,从车辆vc向数据中心发送基于传感器的检测值的数据。在该情况下,只要将接收到的数据等从数据中心向解析中心发送即可。
143.作为车辆vc发送为了算出输出变量z的值而所需的基于传感器的检测值的数据的发送目的地,并不局限于执行算出输出变量z的值的处理的主体。例如,也可以将存储大数据db的数据中心与算出输出变量z的值的解析中心分开,将基于传感器的检测值的数据从车辆vc向数据中心发送。在该情况下,只要将接收到的数据等从数据中心向解析中心发送即可。
144.作为车辆vc发送为了算出输出变量y(1)、y(2)、
…
的值而所需的基于传感器的检测值的数据的发送目的地,并不局限于处理来自多个车辆vc(1)、vc(2)、
…
的数据的主体。例如也可以是车辆vc的用户的便携终端。并且,便携终端只要算出输出变量y(1)、y(2)、
…
的值即可。
145.作为车辆vc发送为了算出输出变量z的值而所需的基于传感器的检测值的数据的发送目的地,并不局限于处理来自多个车辆vc(1)、vc(2)、
…
的数据的主体。例如也可以是车辆vc的用户的便携终端。并且,便携终端只要算出输出变量z的值即可。
146.接下来,说明电子控制单元。
147.作为电子控制单元,并不局限于具备cpu42(92)和rom44(94)而执行软件处理的结构。例如,也可以具备对在上述实施方式中被进行软件处理的结构的至少一部分进行硬件处理的例如asic等专用的硬件电路。即,电子控制单元只要是以下的(a)~(c)的任一结构即可。
148.(a)具备按照程序执行上述全部处理的处理装置和存储程序的rom等程序保存装置。
149.(b)具备按照程序执行上述处理的一部分的处理装置和程序保存装置以及执行其余处理的专用的硬件电路。
150.(c)具备执行上述全部处理的专用的硬件电路。在此,具备处理装置及程序保存装置的执行软件的装置、专用的硬件电路可以为多个。
151.接下来,说明车辆。
152.作为车辆,并不局限于具备变速装置26的结构。即使在不具备变速装置26的情况下,例如在判定动力分配装置20的润滑油中的气泡量、内燃机10的润滑油中的气泡量方面,利用上述映射也有效。
153.作为车辆,并不局限于串联/并联混合动力车。例如也可以是串联混合动力车或并联混合动力车。需要说明的是,作为车载旋转机,并不局限于具备内燃机和电动机/发电机的结构。可以是例如虽然具备内燃机但是不具备电动机/发电机的车辆,而且也可以是例如虽然具备电动机/发电机但是不具备内燃机的车辆。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1