用于飞行器涡轮机的机械齿轮箱的制作方法
1.本发明涉及用于涡轮机的机械齿轮箱领域,特别是用于飞行器涡轮机的机械齿轮箱。
背景技术:
2.现有技术尤其包括文件wo
‑
a1
‑
2010/092263、fr
‑
a1
‑
2987416、fr
‑
a1
‑
3008462、fr
‑
a1
‑
3008463、fr
‑
a1
‑
3041054、ep
‑
a1
‑
3726031和us
‑
a
‑
3307433。
3.机械齿轮箱的作用是改变机械系统的输入轴和输出轴之间的速度比和转矩比。
4.新一代的多流涡轮机,尤其是具有高涵道比的多流涡轮机,包括机械齿轮箱以驱动推进器(例如,风扇)的轴。通常,齿轮箱的目的是将动力涡轮机的轴的所谓的快速旋转速度转换成用于风扇的驱动轴的较慢的旋转速度。
5.这种齿轮箱包括被称为太阳齿轮的中心齿轮、环形齿轮和被称为行星齿轮的齿轮,行星齿轮被啮合在太阳齿轮和环形齿轮之间。行星齿轮由称为行星架的框架保持。太阳轮,齿圈和行星架是行星装置,因为它们的旋转轴线与涡轮机的纵向轴线x重合。行星齿轮具有不同的旋转轴线,并且旋转轴线围绕行星的轴线均匀地分布相同的运行直径上。这些轴线平行于纵向轴线x。
6.齿轮箱的架构有多种。在现有技术的多流涡轮机中,齿轮箱是行星或游星(epicyclic)式的。在其他类似的应用中,存在所谓的差动或“复合”架构。
7.对于行星齿轮箱,行星架是固定的,环形齿轮为该装置的输出轴,该输出轴的旋转方向与太阳齿轮相反。
8.对于游星齿轮箱,环形齿轮是固定的,行星架为该装置的输出轴,该输出轴的旋转方向与太阳齿轮相同。
9.对于复合齿轮箱,没有元件在旋转时是固定的。环形齿轮沿与太阳齿轮和行星架相反的方向旋转。
10.齿轮箱可以包括一个或多个啮合级。这种啮合通过不同方式实现,例如通过接触,摩擦或通过磁场实现。接触啮合具有几种类型,例如直齿齿接、螺旋齿接或人字齿齿接。
11.目标发动机的构架的减速比的增加导致了所谓的“双级”齿轮箱的使用。事实上,超过6或7的减速比,所谓的“单级”技术就失去了它的意义,因为它不再足够紧凑。则必须使用所谓的“双级”齿轮箱。
12.在单级技术中,行星齿轮的相同齿接部与太阳齿轮和环形齿轮配合。在双级技术中,行星齿轮的与太阳齿轮配合的齿接部和行星齿轮的与环形齿轮配合的齿接部是不同的。一般情况下,行星齿轮的分别与太阳齿轮和环形齿轮配合的齿接部具有不同的平均直径。
13.双级齿轮箱(每个级或齿接部包括单组齿)的主要问题在于,这些齿轮箱关于垂直于轴线x的平面是不对称的。因此,从内侧的下游进入和从外侧的上游离开的动力在行星齿轮处产生显著的力矩(表述“上游”和“下游”参照涡轮机中气体的总体流动)。
14.该问题的一个解决方案是使两个齿接部关于垂直于轴线x的平面的对称布置(每个级或齿接部包括双组齿)。这两个齿接部是人字形的,即,它们各自包括与一系列下游齿轴向分隔开的一系列上游齿。上游齿基本上彼此平行并相对于轴线x倾斜。下游齿也基本上彼此平行并相对于轴线x和相对于上游齿倾斜,使得上游齿和下游齿形成围绕行星齿轮的多个人字形。在人字齿接部中,两组齿的螺旋角具有相同的值(和相反的倾斜度),从而使这些组的齿产生具有相同值的相反轴向力。
15.齿接部的与太阳齿轮配合的上游齿、下游齿之间通过环形槽相互隔开。在本技术中,该齿接部的上游齿和下游齿关于前述平面对称,这意味着穿过上游齿和下游齿的顶点并沿着这些顶点延伸的假想线在位于对称平面中的点处相交。这也意味着穿过相应的上游齿和下游齿之一的顶点的假想线,相应地穿过下游齿和上游齿之一的顶点。
16.在行星齿轮的制造过程中,特别是在行星齿轮的与太阳齿轮的啮合齿接部的齿的磨削过程中,这种构造存在缺点。这是因为磨具在平行于齿的方向上以及在齿的整个轴向范围上于齿的上方和/或齿之间移动。在磨削上游齿(或反之亦然)时,为了防止磨具分别与下游齿或上游齿接触而损坏它们,需要使齿之间的轴向槽尺寸过大,以便允许行程结束和磨具的拆卸。这种轴向尺寸过大导致行星齿轮的轴向尺寸增加,从而导致齿轮箱的轴向尺寸增加,这是有害的。
17.这种对称人字形齿接部技术的另一个缺点在于,轴向定位通过齿系列对中的每一个来固定,其作用是:
18.‑
给齿轮箱带来潜在的过压(overstressing),从而不得不加大其尺寸,从而最终造成更大和更重的齿轮箱;这具有重大影响,特别是当行星齿轮的数量大于3个时,因为载荷分布在行星齿轮之间天然地不均匀,因此需要考虑已经存在一个与此现象相关的过压因素;
19.‑
或者强制使太阳齿轮轴向自由,因为在这一点处第一级的轴向位置是自由的,行星齿轮可以将其自身与环形齿轮的啮合齿接部的位置轴向对准,该啮合齿接部的位置本身由环形齿轮的位置固定;这通常通过使用能够轴向滑动的花键来实现,以将太阳齿轮连接到其驱动轴;这种连接存在磨损的危险,并且还可能在驱动太阳齿轮的轴上引入阻尼,这对齿轮箱和发动机的动态性能具有负面影响。
20.本发明提供了对该技术的改进,以简单、有效和经济的方式提供了上述缺点的至少一部分的解决方案。
技术实现要素:
21.本发明涉及一种用于涡轮机的机械齿轮箱,所述涡轮机尤其是飞行器的涡轮机,该齿轮箱包括:
22.‑
太阳齿轮,所述太阳齿轮具有旋转轴线,
23.‑
围绕所述太阳齿轮延伸的环形齿轮,
24.‑
行星齿轮,所述行星齿轮与所述太阳齿轮和所述环形齿轮啮合并且由行星架保持,每个所述行星齿轮具有旋转轴线,并且所述行星齿轮包括用于与所述太阳齿轮啮合的具有平均直径d1的第一齿接部,和用于与环形齿轮啮合的第二齿接部,所述第二齿接部具有不同于平均直径d1的平均直径d2,
25.所述第一齿接部包括一系列上游齿和一系列下游齿,所述上游齿和下游齿位于垂直于所述太阳齿轮的旋转轴线并且基本上穿过所述行星齿轮的中部的平面的两侧,
26.所述第二齿接部包括一系列上游齿和一系列下游齿,所述上游齿和下游齿位于所述平面的两侧并由所述第一齿接部彼此分隔开,
27.其特征在于,所述第二齿接部的上游齿和下游齿彼此平行并平行于行星齿轮的旋转轴线。
28.第二齿接部的上游齿和下游齿的平行意味着这些齿是直齿,而不是人字形的,这与现有技术不同。
29.使用直齿齿接部而不是人字形齿接部对于解决上文提到的关于行星齿轮的轴向过压的问题是有利的。实际上,使用直齿齿接部意味着行星齿轮的轴向位置不被第二齿接部固定,并且因此限制过压的发生,因为直齿齿接部允许轴向滑动。因此,行星齿轮能与仅太阳齿轮轴向对准。因此太阳齿轮的轴向位置可以被固定,这可以允许避免使用旋转花键来将太阳齿轮与其驱动轴连接,因为这些花键可能磨损并限制齿轮箱的使用寿命。
30.根据本技术的齿轮箱可包括一个或多个如下所述特征,这些特征可以相互独立或相互组合:
31.所述第一齿接部的上游齿和下游齿和/或所述第二齿接部的上游齿和下游齿围绕行星齿轮的旋转轴线成角度地布置,从而关于所述平面呈现对称缺陷(symmetry fault);因此,与现有技术相反,第一齿接部的齿关于行星齿轮的垂直于太阳齿轮的旋转轴线的中平面不对称;该对称缺陷对于上述齿的矫正步骤是有用的;事实上,通过这种对称缺陷,磨具与齿之间相互作用的风险是受到了限制;当磨具在第一系列的(上游或下游)齿上或齿之间移动时,磨具到达齿间槽并且发现自己在齿间空间的前方而不在第二系列的(下游或上游)齿的前方;于是,用于使磨具脱出的齿间槽的轴向尺寸可以相应地减小,从而减小行星齿轮的轴向尺寸,并进而减小齿轮箱的轴向尺寸;
32.‑
第一齿接部可为人字齿型,但是替代性地,也可为直齿型;在本技术中,人字齿齿接部是指包括两系列沿不同方向定向的齿的齿接部;所述第一系列的齿相对于一轴线(所述第一系列的齿围绕该轴线延伸)倾斜,所述第二系列的齿相对于所述轴线以与第一系列的齿不同的方式倾斜;因此,两个系列的齿相对于彼此倾斜以形成人字形;两个系列的齿的螺旋角具有相同的值和相反的倾斜方向;
33.所述第一齿接部的上游齿和下游齿各自包括顶点脊和两个侧翼面,所述第一齿接部的上游齿和下游齿围绕所述行星齿轮的旋转轴线成角度地定位,使得每个所述上游齿的顶点脊位于穿过所述下游齿中的一个的侧翼面中的一个的假想线上;
34.‑
所述第一齿接部的上游齿布置成彼此之间具有节距,所述第一齿接部的下游齿布置成彼此之间具有相同的节距,所述第一齿接部的上游齿相对于所述第一齿接部的下游齿围绕所述行星齿轮的旋转轴线以所述节距的一半成角度地偏移;这种偏移为磨具留出了足够的空间,因为在磨削过程结束时,该磨具定位成与相对齿中的两个之间的空间相对,因此可以使齿的系列更靠近,而不存在任何与磨具干涉的风险;因此可在行星齿轮和齿轮箱的轴向尺寸上节省出数毫米;
35.‑
所述第一齿接部的上游齿和下游齿通过位于所述平面中的环形槽彼此间隔开;
36.‑
所述第一齿接部的上游齿和下游齿彼此平行并平行于所述行星齿轮的旋转轴
线,并且在所述平面的层面(level)处相遇;
37.‑
所述环形齿轮包括具有一系列上游齿和下游齿的齿接部,所述环形齿轮的齿接部的上游齿和下游齿分别位于所述平面的两侧并被所述第二齿接部彼此分隔开,所述环形齿轮的上游齿和下游齿彼此平行并与所述太阳齿轮的旋转轴线平行;
38.‑
所述太阳齿轮包括齿接部(优选地,具有人字形齿),所述太阳齿轮的齿接部包括一系列的上游齿和下游齿,所述上游齿和下游齿分别位于所述平面的两侧;
39.‑
所述太阳齿轮的齿接部与驱动所述太阳齿轮的轴成一体;
40.‑
所述太阳齿轮的齿接部被安装并固定到用于驱动太阳齿轮的轴上,驱动轴包括与所述太阳齿轮的互补内花键接合的外花键。
41.‑
环形螺母被螺纹连接到所述轴的自由端部上,并轴向地压靠在所述太阳齿轮上,以将所述太阳齿轮轴向地固定在所述轴上;因此,螺母封锁了太阳齿轮相对于所述轴的自由度;
42.‑
所述环形齿轮被配置为固定而不围绕所述轴线旋转,并且所述行星架被配置为绕所述轴线可移动地旋转;
43.‑
所述环形齿轮被配置为绕所述轴线可移动地旋转,并且所述行星架被配置为固定而不围绕所述轴线旋转。
44.本发明还涉及一种涡轮机,特别是飞行器的涡轮机,所述涡轮机包括如上所述的机械齿轮箱。
附图说明
45.下面将参考附图对本发明进行描述,其中:
46.图1为根据本发明的涡轮机的示意性轴向截面视图;
47.图2为的单啮合级机械齿轮箱的部分轴向横截面视图,并且示出了本发明的现有技术;
48.图3为的双啮合级机械齿轮箱的部分轴向横截面视图,并且示出了本发明之前的现有技术;
49.图4为图3的齿轮箱的另一示意性截面视图;
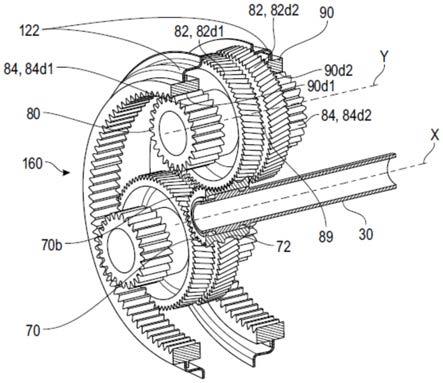
50.图5为的双啮合级机械齿轮箱的部分轴向横截面和透视视图,并且示出了本发明的实施例;
51.图6为齿轮箱的行星齿轮的齿接部中的一个的齿的纯示意性的视图;
52.图7为图6的一部分的放大视图,示出了太阳齿轮在其驱动轴上的安装示例,以及
53.图8为根据本发明的齿轮箱的行星齿轮的第一齿接部的一部分的示意性透视图。
具体实施方式
54.图1示出了涡轮机1,其通常包括风扇s,低压压缩机1a,高压压缩机1b,环形燃烧室1c,高压涡轮1d,低压涡轮1e和排气喷嘴1h。高压压缩机1b和高压涡轮1d通过高压轴2连接,并共同形成高压(hp)主体。低压压缩机1b和低压涡轮1d通过低压轴3连接,并共同形成低压(lp)主体。
55.风扇s由风扇轴4驱动,该风扇轴通过齿轮箱6而被lp轴3驱动。所述齿轮箱6通常是
行星式(planetary type)或游星式(epicyclic type)的。
56.下面的描述涉及游星式齿轮箱,其中,行星架和太阳齿轮可旋转地移动,齿轮箱的环形齿轮在发动机的参考系中固定。
57.齿轮箱6位于涡轮机的上游部分。在此处,示意性地,包括上游部分5a和下游部分5b(构成发动机壳体或定子5)的固定结构被布置成形成围绕齿轮箱6的外壳e。在此处,该外壳e在上游在轴承(level of a bearing)处通过密封件封闭,所述轴承允许风扇轴4穿过,该外壳在下游在lp轴3的通道(level of the passage)处通过密封件封闭。
58.图2示出游星齿轮箱6。在输入侧,齿轮箱6例如经由内花键7a连接至lp轴3。因此,lp轴3驱动称为太阳齿轮7的中心齿轮。常规地,太阳轮7的旋转轴线与涡轮机的轴线x重合,太阳轮驱动一系列称为行星齿轮8的齿轮,这些齿轮围绕旋转轴线x均匀地分布在相同的直径上。该直径等于太阳齿轮7和行星齿轮8之间的运行中心距离(operating centre distance)的两倍。对于这种类型的应用,行星齿轮8的数量通常限定为介于三个到七个之间。
59.行星齿轮8的组由称为行星架10的框架保持。每个行星齿轮8绕其自身的轴线y旋转并且与环形齿轮9啮合。
60.对于输出,为下述情况:
61.‑
在这种游星构型中,行星齿轮8的组使行星架10绕涡轮机的轴线x旋转。环形齿轮经由环形齿轮架12附接至发动机壳体或定子5,并且行星架10附接至风扇轴4。
62.‑
在另一种行星构型中,行星齿轮8的组由附接到发动机壳体或定子5的行星架10保持。每个行星齿轮驱动通过环形齿轮架12固定到风扇轴4的环形齿轮。
63.‑
在另一种不同构型中,行星齿轮8的组由连接到第一风扇轴5的行星架10保持。每个行星齿轮驱动通过环形齿轮架12固定到第二对旋风扇轴4的环形齿轮。
64.每个行星齿轮8借助于轴承11(例如,轴承或流体动力轴承)被可自由旋转地安装。每个轴承11安装在行星架10的轴10b中的一个上,并且所有的轴通过行星架10的一个或多个结构框架10a来相对于彼此定位。轴10b的数量和轴承11的数量等于行星齿轮的数量。出于操作,组装,制造,目检,维修或更换的原因,可以将轴10b和框架10a分成多个部分。
65.由于与上述相同的原因,行星齿轮的齿接部可以被分成多个螺旋或齿,螺旋或齿各自具有个中间平面p,p'。在示例中,详细说明了齿轮箱的操作,其中,每个行星齿轮包括与环形齿轮(所述环形齿轮分被成两个环形齿轮半部)配合的两个系列的人字形齿:
66.‑
上游环形齿轮半部9a由轮缘9aa和紧固凸缘半部9ab组成。在轮缘9aa上是与每个行星齿轮8的齿接部8d的螺旋啮合的前螺旋。齿接部8d的螺旋也与太阳齿轮7的螺旋啮合。
67.‑
下游环形齿轮半部9b包括轮缘9ba和紧固凸缘半部9bb。在轮缘9ba上是与每个行星齿轮8的齿接部8d的螺旋啮合的后螺旋。齿接部8d的螺旋也与太阳齿轮7的螺旋啮合。
68.尽管由于齿接重叠而使得太阳齿轮7,行星齿轮8和环形齿轮9之间的螺旋宽度变化,这些螺旋宽度都以针对上游齿的中间平面p为中心,并且以针对下游齿的另一中间平面p为中心。
69.因此,图2示出了单啮合级齿轮箱的情况,即,每个行星齿轮8的相同齿接部8d与太阳齿轮7和环形齿轮9两者配合。即使齿接部8d包括两组齿,这些齿也具有相同的平均直径并形成称为人字齿型的单个齿接部。
70.上游齿圈9a的紧固凸缘半部9ab和下游齿圈9b的紧固凸缘半部9bb形成环形齿轮的紧固凸缘9c。举例而言,通过利用螺栓组件将环形齿轮的紧固凸缘9c和环形齿轮架的紧固凸缘12a组装在一起,环形齿轮9被固定到环形齿轮架。
71.图2中的箭头描述了齿轮箱6中的油输送。油通过多种方式从定子部分5进入涡轮定子13而进入齿轮箱6,在此视图中对此将不再具体规定,因为它们针对了一种或多种类型的架构。涡轮定子13包括喷射器13a和臂13b。喷射器13a的作用是润滑齿接部,臂13b的作用是润滑轴承。油被供给到喷射器13a并通过端部13c离开以润滑齿接部。油也被供给到臂13b并流动穿过轴承的供给入口13d。然后,油经过轴流入一个或多个缓冲区10c,并随后通过孔口10d流出,以润滑行星齿轮的轴承。
72.图3和图4示出了称为双啮合级的齿轮箱构架的另一个示例,该齿轮箱包括:
73.‑
太阳齿轮70,所述太阳齿轮具有旋转轴线x,
74.‑
环形齿轮90,所述环形齿轮围绕太阳齿轮延伸并且构造成固定而不围绕轴线x旋转,以及
75.‑
行星齿轮80,所述行星齿轮与太阳齿轮70和环形齿轮90啮合,并由行星架100保持,该行星架构造成可移动地绕轴线x旋转。
76.平面h被定义为垂直于轴线x并且基本上穿过齿轮箱60的中部的中间平面(图4)。
77.太阳齿轮70包括用于与lp轴30联接的内花键70a以及用于与行星齿轮80啮合的外齿接部70b。齿接部70b具有两系列相邻的人字形齿,两系列相邻的人字形齿通过径向向外定向的环形槽72彼此分隔开。齿接部70b关于平面h对称,该齿接部的齿位于穿过槽72的平面h的两侧。
78.环形齿轮90由两个独立的环90a,90b形成,并包括齿接部,该齿接部被分成分别由两个环支撑的两系列的人字形齿90d1,90d2。
79.环90a,90b关于平面h对称地布置,平面h因此在所述环之间延伸。环通过环形连接罩122连接并固定到环形齿轮架120上。罩122之间彼此独立,每个罩具有大致的s形的轴向半截面,这在操作期间通过弹性变形为罩122提供一定的径向柔性。
80.每个环90a,90b围绕轴线x延伸,并通过环的外周固定到相应的罩122。环的内周包括齿90d1,90d2中的一个。
81.环形齿轮架120具有围绕轴线x的大致环形形状,并且更特别地是双锥形。因此,环形齿轮架包括第一上游(在图中左侧)部段,其包括具有较小直径的上游端部和具有较大直径的下游端部,具有较大直径的下游端部连接到另一下游(在图中右侧)部段的具有较大直径的上游端部。部段的具有较大直径的端部因此相互连接,部段的具有较小直径的端部形成环形齿轮架的轴向端部。
82.环形齿轮架120的上游端部围绕行星架100或连接到行星架的轴延伸,并且借助于至少一个轴承124在行星架或轴上对中并被可旋转地引导。相似地,环形齿轮架120的下游端部围绕行星架100或连接到行星架的轴延伸,并且借助于至少一个附加的轴承126在行星架或轴上对中并被可旋转地引导。
83.与环形齿轮90的情况一样,环形齿轮架120关于平面h是对称的,平面h在环形齿轮架的中部与环形齿轮架相交,因此穿过上述部段的具有较大直径的端部。
84.每个行星齿轮80包括用于与太阳齿轮70啮合第一齿接部82和用于与环形齿轮90
啮合的第二齿接部84,所述第一齿接部具有平均直径d1,所述第二齿接部具有平均直径d2,所述平均直径d2与平均直径d1不同,并且尤其是小于平均直径d1。平均直径从每个行星齿轮的轴线y测量,并表示该行星齿轮的齿接部的最大直径和最小直径之间的平均值。
85.每个行星齿轮80包括圆柱形主体86和从主体86的中部基本上径向向外延伸的环形腹板88。齿接部84被分成位于主体86的相应轴向端部上的两组人字形齿84d1,84d2。齿接部82包括两个系列的人字形齿82d1,82d2,所述两个系列的人字形齿位于腹板88的外周处,并通过相对于轴线y径向向外敞开的环形槽89彼此分隔开。
86.齿接部82在其中部被穿过槽89的平面h穿过,因此齿82d1,82d2布置在平面h的两侧。齿84d1,84d2也关于平面h对称地布置。
87.齿接部82和腹板88的外周具有的轴向尺寸小于环90a,90b之间以及罩122之间的轴向距离,使得每个行星齿轮80可以在环形齿轮架120中以及在环90a,90b之间和罩122之间自由旋转。
88.这种构架存在一些缺点,这些缺点通过根据本发明的齿轮箱160所作出的改进来解决,实施例示于图5中。
89.上文中关于图3和图4描述的元件在图5中由相同的附图标记指示。因此,上文中关于图3和4的描述适用于图5的实施例,只要它不与下文的内容相矛盾或不被下文的内容替代。
90.齿轮箱160的第一改进涉及第一齿接部82的齿82d1,82d2。所述第一齿接部82是人字形的,这和图3和图4的齿轮箱60相同。然而,与图3和图4的齿轮箱60不同,该齿接部82的齿82d1,82d2关于平面h不对称。相反,在根据本发明的齿轮箱160中,上游齿82d1相对于下游齿82d2围绕轴线y成角度地偏移,如图8所示。
91.图6是齿接部82的齿82d1,82d2的纯示意性的图示。每个齿82d1,82d2包括具有大致笔直的脊的顶点82s。每个齿82d1,82d2还包括从顶点82s或顶点脊向齿间空间82e延伸的两个侧翼面82f。如示意性地示出的,每个齿82d1,82d2的横截面大致为三角形或梯形。
92.第一齿接部82的上游齿82d1和下游齿82d2围绕轴线y成角度地布置,使得每个上游齿82d1的顶点脊82s位于穿过下游齿82d2中的侧翼面82f中的一个的假想线l上(参见图8)。
93.上游齿82d1布置成彼此之间具有节距p。下游齿82d2布置成彼此之间具有相同的节距p。优选地,上游齿82d1相对于下游齿82d2围绕行星齿轮80的旋转轴线y以节距的一半成角度地偏移。
94.这种偏移为磨具留出了足够的空间,因为在磨削过程结束时,该磨具定位成与两个相邻的齿之间的空间或间隙82e相对。因此,通过减小位于齿的系列之间的槽89的轴向尺寸,可以使齿82d1,82d2的系列更靠近,而不存在与磨具干涉的危险。这在行星齿轮80和齿轮箱160的轴向尺寸上节省数毫米。
95.齿轮箱160的另一个改进涉及第二齿接部84,第二齿接部不再是人字形而是直齿形(见图5)。该齿接部84包括彼此平行并与行星齿轮80的旋转轴线y平行的上游齿84d1和下游齿84d2。因此,与第一齿接部82不同,该第二齿接部84关于前述平面h(穿过槽89并垂直于轴线x的平面)对称。
96.使用直齿齿接部84而不是人字形齿接部对于解决上文提到的关于行星齿轮80的
轴向过压的问题是有利的。由于直齿齿接部84允许行星齿轮相对于环形齿轮90的轴向滑动,因此使用直齿齿接部84允许行星齿轮80的轴向位置不因该齿接部84而锁死,并因此限制过压的发生。
97.因此,行星齿轮80可以仅与太阳齿轮70轴向对准,并且因此可以确保太阳齿轮的轴向位置。
98.如图7所示,太阳齿轮70包括具有人字形齿的齿接部70b,该人字形齿与行星齿轮80的齿接部82互补,以便啮合。因此,该齿接部70b包括分别位于平面h的两侧并通过槽72彼此间隔开的上游齿和下游齿。由于该齿接部70b与行星齿轮的齿接部82的互补,齿接部70b的系列关于平面h也具有对称缺陷(偏移)。
99.太阳齿轮70及其齿接部70b可以与lp轴30成一体。在此处示出的变型中,太阳齿轮70被安装并固定到lp轴30上。
100.在该变型中,lp轴30包括与太阳齿轮70的互补内花键70a接合的外花键,并且环形螺母94螺纹连接到lp轴30的自由端部上并且轴向地压靠在太阳齿轮上以将其轴向地固定在轴上。太阳齿轮70包括,例如,内环形边缘96,该内环形边缘被轴向地夹置在螺母94和lp轴30的环形台肩(未示出)之间。因此,螺母94锁定了太阳齿轮70相对于lp轴30的自由度。
101.齿轮箱160的环形齿轮90与齿轮箱60的相似,除了其齿接部90的齿90d1,90d2是直齿并因此彼此平行并与轴线x平行。
102.上面提到的改进可以相互独立地使用,也可以相互组合地使用。
103.其它的改进也是可能的。
104.齿接部84的齿84d1,84d2可以围绕每个行星齿轮80的轴线y彼此成角度地偏移。该偏移可以单独使用或与齿接部82的齿82d1,82d2的偏移相组合地使用。
105.在根据本发明的齿轮箱的另一个未示出的替代方案中,每个行星齿轮80的齿接部82也可以是直齿。因此,应当理解,太阳齿轮的齿接部70b也将是直齿。每个行星齿轮80的齿接部84可以是直齿,如上所述,或者可以具有人字形齿。在该构造中,直齿齿接部82的齿82d1,82d2可以通过所述槽89彼此间隔开,或者它们可以在平面h的层面处相遇。
106.本发明的齿轮箱160尤其可以与下述情况兼容:
107.‑
具有旋转的行星架和固定的环形齿轮的“游星”用途;
108.‑
具有旋转的环形齿轮和固定的行星架的“行星”用途;
109.‑
具有旋转的环形齿轮和行星架的“差动”用途;
110.‑
滚动轴承和动压轴承;
111.‑
一体式或多部件式行星架。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1