管道爬行装置及其模块化驱动装置的制作方法
1.本发明属于管道机器技术领域,更具体地说,本发明涉及一种管道爬行装置及其模块化驱动装置。
背景技术:
2.由于在实际工作中,各种管道存在弯角、变径、或者布置方式水平或者竖直的各种工况,当管道内部出现裂纹、腐蚀、或者管道中存在异物时,为了查明管道内部的具体情况,需要采用管道爬行装置进入管道内部,通过管道爬行装置上携带的视频设备等对管道内部情况做详细的评估,再确定如何实现下一步对管道内部的修复工作。
3.但是,在实际中遇到的管道直径有各种系列,如果对每种规格的管道都设计相应的管道爬行装置不但使用繁琐,而且会导致成本增加。
4.有鉴于此,确有必要提供一种简单、方便的管道爬行装置及其模块化驱动装置。
技术实现要素:
5.本发明的目的在于:克服现有技术的缺陷,提供一种简单、方便的管道爬行装置及其模块化驱动装置。
6.为了实现上述发明目的,本发明提供了一种模块化驱动装置,其包括:
7.壳体,设有中心块,中心块包括内置的驱动电机和电机减速机;
8.前轴,位于壳体的前端,前轴两侧分别安装有主动轮;以及
9.后轴,位于壳体的后端,后轴两侧分别安装有从动轮;
10.其中,壳体同侧的主动轮和从动轮通过链条连接,驱动电机经电机减速机驱动主动轮转动,并通过链条传动带动从动轮同步转动。
11.作为本发明模块化驱动装置的一种改进,所述中心块采用密封设计,具有ip68的防护等级。
12.作为本发明模块化驱动装置的一种改进,所述壳体上设有相对于壳体突出的辅助行走轮。
13.作为本发明模块化驱动装置的一种改进,所述壳体上设有位于主动轮和从动轮之间的张紧轮。
14.作为本发明模块化驱动装置的一种改进,所述电机减速机端部设有对接的锥齿轮组,锥齿轮组通过驱动电机带动转动,使前轴与锥齿轮组同步转动并带动主动轮转动。
15.作为本发明模块化驱动装置的一种改进,所述壳体的两侧分别设有相对于壳体侧边缘突出的辅助支撑轮。
16.作为本发明模块化驱动装置的一种改进,所述壳体的两侧分别设有两个辅助支撑轮,两个辅助支撑轮分别邻近前轴和后轴。
17.作为本发明模块化驱动装置的一种改进,所述壳体邻近前轴或后轴设有保护罩。
18.为了实现上述发明目的,本发明还提供了一种管道爬行装置,其包括爬行本体和
安装在爬行本体上的模块化驱动装置,其中,所述模块化驱动装置为本发明模块化驱动装置。
19.作为本发明管道爬行装置的一种改进,所述模块化驱动装置和爬行本体通过快换接卸接口组接。
20.相对于现有技术,本发明模块化驱动装置具有以下优点:
21.模块化驱动装置采用模块化设计,在不同直径的管道中使用时,只需要设计适合相应管道内径的爬行本体,再通过爬行本体和模块化驱动装置上预留的快换接卸接口将二者组合起来,即可实现管道爬行装置在相应内径的管道中的爬行作业,整套设备简单可靠,操作方便,适用性强。
22.模块化驱动装置的驱动电机和电机减速机安装在驱动装置内部,并做了相应的密封设计,整体可实现ip68级防护,可以适应各种类型的管道环境。
23.驱动电机驱动两个主动轮,并采用链条将主动轮与从动轮连接起来,使驱动模块中驱动电机工作时,前后两侧均具备驱动力,可避免因管道内部直径变化过大使主动轮悬空空转,而使整个模块化驱动装置失去驱动力。
附图说明
24.下面结合附图和具体实施方式,对本发明管道爬行装置及其模块化驱动装置进行详细说明,其中:
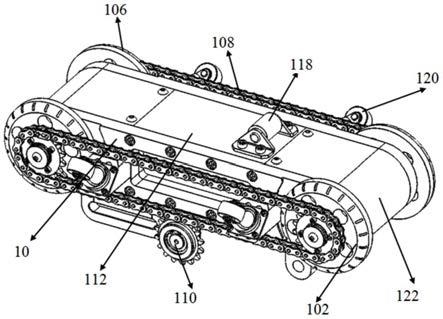
25.图1为本发明模块化驱动装置的结构示意图。
26.图2为本发明模块化驱动装置的另一个结构示意图。
27.图中:
28.10
‑‑
壳体;100
‑‑
前轴;102
‑‑
主动轮;104
‑‑
后轴;106
‑‑
从动轮;108
‑‑
链条;110
‑‑
张紧轮;112
‑‑
中心块;114
‑‑
电机减速机;116
‑‑
锥齿轮组;118
‑‑
辅助行走轮;120
‑‑
辅助支撑轮;122
‑‑
保护罩。
具体实施方式
29.为了使本发明的发明目的、技术方案及其技术效果更加清晰,以下结合附图和具体实施方式,对本发明进行进一步详细说明。应当理解的是,本说明书中描述的具体实施方式仅仅是为了解释本发明,并非为了限定本发明。
30.请参照图1至图2所示,本发明提供了一种模块化驱动装置,其包括:
31.壳体10,设有中心块112,中心块112包括内置的驱动电机(未图示)和电机减速机114;
32.前轴100,位于壳体10的前端,前轴100两侧分别安装有主动轮102;以及
33.后轴104,位于壳体10的后端,后轴104两侧分别安装有从动轮106;
34.其中,壳体10同侧的主动轮102和从动轮106通过链条108连接,驱动电机经电机减速机114驱动主动轮102转动,并通过链条传动带动从动轮106同步转动。
35.在图示实施方式中,驱动电机和电机减速机114安装在中心块112的内部,中心块112的两侧均采用密封设计,模块化驱动装置的其他零部件均可在有水环境下工作,所以整个模块化驱动装置具有ip68的防护等级,可保证模块化驱动装置在复杂的管道环境中工
作。
36.请参照图2所示,本发明模块化驱动装置中,电机减速机114端部与锥齿轮组116相连,通过驱动电机带动锥齿轮组116转动,可使前轴100与锥齿轮组116同步转动,从而带动主动轮102旋转,实现装置在管道内部的行走。
37.主动轮102与从动轮106之间采用链条108连接,可使主动轮102与从动轮106同步转动,当驱动装置处在管道内径变化复杂的管道中导致驱动装置主动轮悬空时,驱动电机依然能够传递扭矩到从动轮106上,使驱动装置依然能够有足够的驱动力前进。
38.请继续参照图1所示,模块化驱动装置的顶部安装辅助行走轮118,当其搭载在爬行本体上通过弯曲管道时,模块化驱动装置上的辅助行走轮118会先与弯管靠内的管壁侧接触,从而防止模块化驱动装置的上侧面与管壁直接接触导致爬行设备卡死在管道中无法通过。
39.本发明模块化驱动装置的侧面安装辅助支撑轮120,当其搭载在爬行本体上通过弯曲管道时,无论管道爬行装置处在何种姿态,侧面的辅助支撑轮120都会先于驱动装置上的零部件与管道壁接触,防止设备上的其他零件与管道内壁碰撞而产生损坏。在图示实施方式中,壳体10的两侧分别设有两个辅助支撑轮120,两个辅助支撑轮120分别邻近前轴100和后轴104。此外,壳体10邻近前轴100或后轴104设有保护罩122。
40.请继续参照图1所示,主动轮102和从动轮106之间的链条108上设有张紧轮110,在使用过程中可通过调节张紧轮110使链条108始终保持在一个比较紧的状态,防止链条传动时跳齿或者拖行到管道内壁上。在图1所示的实施方式中,张紧轮110设置于壳体10上。
41.可以理解的是,本发明模块化驱动装置可用于管道爬行装置中,管道爬行装置包括爬行本体和安装在爬行本体上的本发明模块化驱动装置,模块化驱动装置和爬行本体通过快换接卸接口组接。
42.结合以上对本发明实施方式的详细描述可以看出,相对于现有技术,本发明模块化驱动装置具有以下优点:
43.模块化驱动装置采用模块化设计,在不同直径的管道中使用时,只需要设计适合相应管道内径的爬行本体,再通过爬行本体和模块化驱动装置上预留的快换接卸接口将二者组合起来,即可实现管道爬行装置在相应内径的管道中的爬行作业,整套设备简单可靠,操作方便,适用性强。
44.模块化驱动装置的驱动电机和电机减速机114安装在驱动装置内部,并做了相应的密封设计,整体可实现ip68级防护,可以适应各种类型的管道环境。
45.驱动电机驱动两个主动轮102并采用链条108将主动轮102与从动轮106连接起来,使驱动模块中驱动电机工作时,前后两侧的主动轮102均具备驱动力,可避免因管道内部直径变化过大使主动轮悬空空转,而使整个模块化驱动装置失去驱动力。
46.根据上述原理,本发明还可以对上述实施方式进行适当的变更和修改。因此,本发明并不局限于上面揭示和描述的具体实施方式,对本发明的一些修改和变更也应当落入本发明的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本发明构成任何限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1