一种水陆两栖管网机器人
1.本公开一般涉及管网机器人技术领域,具体涉及一种水陆两栖管网机器人。
背景技术:
2.管网机器人通常用于对管道内的数据进行采集,解决地下空间定位问题。
3.现有技术中,管网机器人受管道内复杂环境的限制,例如:潮湿的湿滑环境、淤泥环境、水环境等,容易造成机器人倾翻或陷入;影响其上的检测设备正常进行检测,甚至还会出现无法返程的情况,浪费检测资源。
技术实现要素:
4.鉴于现有技术中的上述缺陷或不足,期望提供一种可解决上述技术问题的一种水陆两栖管网机器人。
5.本申请提供一种水陆两栖管网机器人,包括:
6.履带底盘;
7.两个行进履带,通过传动组件安装在所述履带底盘两侧;
8.以及驱动组件,用于驱动所述传动组件动作;
9.所述传动组件动作时用于带动两个所述行进履带转动行进;
10.所述行进履带外壁上设有用于与水路或陆路摩擦接触的若干个划板和浮球。
11.根据本申请实施例提供的技术方案,所述划板与所述浮球间隔设置。
12.根据本申请实施例提供的技术方案,所述划板垂直于所述行进履带设置。
13.根据本申请实施例提供的技术方案,两个所述行进履带分别为第一履带和第二履带;所述传动组件包括用于带动所述第一履带转动的第一组件以及用于带动所述第二履带转动的第二组件。
14.根据本申请实施例提供的技术方案,所述履带底盘靠近所述第一履带一侧侧壁为第一侧壁,靠近所述第二履带一侧侧壁为第二侧壁;
15.所述第一组件包括垂直于所述第一侧壁且与所述第一侧壁转动连接的第一驱动轴和第一从动轴,安装在所述第一驱动轴上的第一驱动轮以及安装在所述第一从动轴上的第一从动轮;
16.所述第一驱动轮、第一从动轮与所述第一履带内壁啮合,用于带动所述第一履带转动。
17.根据本申请实施例提供的技术方案,所述第二组件包括垂直于所述第二侧壁且与所述第二侧壁转动连接的第二驱动轴和第二从动轴,安装在所述第二驱动轴上的第二驱动轮以及安装在所述第二从动轴上的第二从动轮;
18.所述第二驱动轮、第二从动轮与所述第二履带内壁啮合,用于带动所述第二履带转动。
19.根据本申请实施例提供的技术方案,所述驱动组件包括用于驱动所述第一驱动轴
转动的第一电机以及用于驱动所述第二驱动轴转动的第二电机;所述第一电机与所述第二电机安装在所述履带底盘内安装方向不共线。
20.根据本申请实施例提供的技术方案,所述第一电机远离所述第一驱动轮的一端靠近所述第二侧壁;所述第二电机远离所述第二驱动轮的一端靠近所述第一侧壁。
21.根据本申请实施例提供的技术方案,所述第一侧壁上转动连接有第一张紧轮,用于张紧所述第一履带;
22.所述第二侧壁上转动连接有第二张紧轮,用于张紧所述第二履带。
23.根据本申请实施例提供的技术方案,所述履带底盘上安装有摄像头。
24.本申请的有益效果在于:当所述水陆两栖管网机器人在有水环境中行进时,所述浮球受浮力作用而使得本装置可适应于水面环境,此时通过驱动组件驱动所述传动组件动作,使得行进履带转动行进;由于所述行进履带外壁上设有划板和浮球,使得增加了行进过程中与水的接触面积,增加了划水能力;在地面环境行进时,此时划板与浮球外侧直接与地面接触,增加了接触面积,抓地力更强。即使当管道内存有淤泥时,由于划板以及浮球与淤泥接触面较大,因此可顺利通行。
25.在划板起到与地面接触支撑的同时,由于所述浮球具有形变量,使得可有助于降低在行进过程中的颠簸,避免运动过快、或环境复杂造成机器人的倾倒、颠簸,影响行进或检测。
26.本申请提供的一种水陆两栖管网机器人可适应于水陆环境,增加了行进过程中与水面或底面间的接触面积,提高了对复杂环境的适应性,有利于提高检测效率。
附图说明
27.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它特征、目的和优点将会变得更明显:
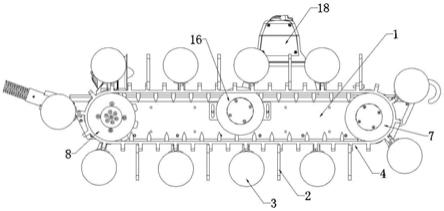
28.图1为本申请提供的一种水陆两栖管网机器人俯视结构示意图;
29.图2为本申请提供的一种水陆两栖管网机器人侧视结构示意图;
30.图中标号:
31.1、履带底盘;2、划板;3、浮球;4、第一履带;5、第二履带;6、第一驱动轴;7、第一从动轴;8、第一驱动轮;9、第一从动轮;10、第二驱动轴;11、第二从动轴;13、第二从动轮;14、第一电机;15、第二电机;16、第一张紧轮;17、第二张紧轮;18、摄像头。
具体实施方式
32.下面结合附图和实施例对本申请作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
33.需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
34.请参考图1及图2为本申请提供的一种水陆两栖管网机器人,包括:
35.履带底盘1;
36.两个行进履带,通过传动组件安装在所述履带底盘1两侧;
37.以及驱动组件,用于驱动所述传动组件动作;
38.所述传动组件动作时用于带动两个所述行进履带转动行进;
39.所述行进履带外壁上设有用于与水路或陆路摩擦接触的若干个划板2和浮球3,如图2所述。
40.具体的,“陆路”泛指地面环境,即可以为地面、结构面,沼泽地、淤泥地、草地或其他地面环境。“水路”泛指有水环境,即可以为有水管道、井下、河流或其他水路环境。
41.具体的,所述划板2和浮球3具有若干个,即可以为一个、两个或多个;优选的,所述划板2和浮球3均为多个且均匀设置在所述行进履带外壁上。
42.具体的,“行进履带外侧”为行进履带与水路或陆路相接触一侧。
43.具体的,两个所述行进履带外壁周向上均设有所述划板2以及浮球3,所述浮球3具有形变量。
44.具体的,所述行进履带外壁沿周向设有若干个安装齿,所述浮球3以及划板2通过紧固件或安装座固定安装在所述安装齿上。
45.具体的,所述履带底盘1内设有通信线缆和动力线缆。
46.工作原理:本申请提供的一种水陆两栖管网机器人可适应于多种应用场景,为了便于说明本申请的工作原理,以管道为例:
47.将所述水陆两栖管网机器人设置在管道内,当管道内有水存在时,所述浮球3受浮力作用而使得本装置可适应于水面环境,此时通过驱动组件驱动所述传动组件动作,使得行进履带转动行进;由于所述行进履带外壁上设有划板2和浮球3,使得增加了行进过程中与水的接触面积,增加了划水能力;当管道内没有水存在时,此时划板2与浮球3外侧直接与管道内壁接触,增加了接触面积,抓地力更强。即使当管道内存有淤泥时,由于划板2以及浮球3与淤泥接触面较大,因此也可顺利通行。浮球3一方面增加了水中浮力,同时在淤泥中有足够的接触面积,从而阻止了机器人陷入淤泥中,降低了前进阻力,同时浮球3又能提供足够的前后接触面积,从而增加了拖拽力。
48.在划板2起到与地面接触支撑的同时,由于所述浮球3具有形变量,使得可有助于降低在行进过程中的颠簸,避免运动过快、或环境复杂造成机器人的倾倒、颠簸,影响行进或检测。
49.本申请提供的一种水陆两栖管网机器人可适应于水陆环境,增加了行进过程中与水面或底面间的接触面积,提高了对复杂环境的适应性,有利于提高检测效率。
50.其中,在所述划板2与浮球3的优选实施方式中,所述划板2与所述浮球3间隔设置。
51.优选的,若干个所述划板2均布设置,相邻两个所述划板2间设置所述浮球3;间隔设置使得所述其与水面或地面接触时,受力均匀,使行进过程更加平稳。
52.其中,在所述划板2的优选实施方式中,所述划板2垂直于所述行进履带设置。使得当所述划板2与水面接触时,使得其与水面的接触面积最大,提高了划水能力。
53.其中,在所述传动组件的优选实施方式中,两个所述行进履带分别为第一履带4和第二履带5;所述传动组件包括用于带动所述第一履带4转动的第一组件以及用于带动所述第二履带5转动的第二组件。
54.通过将所述第一组件与第二组件分别控制所述第一履带4与第二履带5,使得所述第一履带4与第二履带5可独立驱动,当一侧的履带受限时,另一侧履带可进行驱动,有利于
适应复杂环境,避免陷入淤泥等环境中。
55.其中,在所述第一组件的优选实施方式中,所述履带底盘1靠近所述第一履带4一侧侧壁为第一侧壁101,靠近所述第二履带5一侧侧壁为第二侧壁102;
56.所述第一组件包括垂直于所述第一侧壁101且与所述第一侧壁101转动连接的第一驱动轴6和第一从动轴7,安装在所述第一驱动轴6上的第一驱动轮8以及安装在所述第一从动轴7上的第一从动轮9;
57.所述第一驱动轮8、第一从动轮9与所述第一履带4内壁啮合,用于带动所述第一履带4转动。
58.具体的,所述第一驱动轴6与所述第一驱动轮8固定连接,当所述第一驱动轴7转动时,所述第一驱动轮8随之转动,进而带动所述第一履带4以及第一从动轴7转动。
59.其中,在所述第二组件的优选实施方式中,所述第二组件包括垂直于所述第二侧壁102且与所述第二侧壁102转动连接的第二驱动轴10和第二从动轴11,安装在所述第二驱动轴10上的第二驱动轮12以及安装在所述第二从动轴11上的第二从动轮13;
60.所述第二驱动轮12、第二从动轮13与所述第二履带5内壁啮合,用于带动所述第二履带5转动。
61.具体的,所述第二驱动轴10与所述第二驱动轮12固定连接,当所述第二驱动轴10转动时,所述第二驱动轮12随之转动,进而带动所述第二履带5以及第二从动轴11转动。
62.其中,在所述驱动组件的优选实施方式中,所述驱动组件包括用于驱动所述第一驱动轴6转动的第一电机14以及用于驱动所述第二驱动轴10转动的第二电机15;所述第一电机14与所述第二电机15安装方向不共线。
63.具体的,所述第一电机14的转轴与所述第一驱动轴6固定连接;所述第二电机15的转轴与所述第二驱动轴10固定连接。
64.优选的,所述第一电机14与第二电机15为减速电机。
65.具体的,所述第一电机14以及第二电机15安装在履带底盘1内,因此其安装方向不共线,也即所述第一电机14与所述第二电机15侧壁相互朝向设置。使得可减小安装宽度,减小履带底盘1宽度尺寸,进而使所述水陆两栖管网机器人可适应检查井等狭小空间。
66.其中,在所述驱动组件的优选实施方式中,所述第一电机14远离所述第一驱动轮8的一端靠近所述第二侧壁102;所述第二电机15远离所述第二驱动轮12的一端靠近所述第一侧壁101。使得可最大化的减小安装宽度,以适应狭小空间环境。
67.其中,在所述第一履带4与第二履带5的优选实施方式中,所述第一侧壁101上转动连接有第一张紧轮16,用于张紧所述第一履带4;
68.所述第二侧壁102上转动连接有第二张紧轮17,用于张紧所述第二履带5。
69.具体的,所述第一侧壁101上转动连接有第一张紧轴;所述第一张紧轮安装在所述第一张紧轴上,所述第一张紧轮与所述第一履带4内壁啮合传动。
70.同理,所述第二侧壁102上转动连接有第二张紧轴;所述第二张紧轮安装在所述第二张紧轴上,所述第二张紧轮与所述第二履带5内壁啮合传动。
71.其中,在所述履带底盘1的优选实施方式中,所述履带底盘1上安装有摄像头18。
72.具体的,所述摄像头18用于采集图像或视频信息,优选的,所述摄像头18为防水摄像头,可通过无线的方式传输至外部系统。
73.其中,在所述履带底盘1的优选实施方式中,所述履带底盘1上安装有防水箱19,所述防水箱19用于对控制元件或线路起到防水和保护的作用。
74.以上描述仅为本申请的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本申请中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本申请中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1