一种管道内壁焊接行走机器人的制作方法
1.本发明涉及机械工程领域,尤其涉及一种管道内壁焊接行走机器人。
背景技术:
2.焊接是利用高温高压的环境来将两种相同材料的物质进行熔接,最常见的就有管道焊接、角铁焊接等,对于管道焊接,一些管壁较薄的管道可以在管道外侧焊接就可以形成严密的焊缝,而对于一些管壁较厚的管道来说,不仅需要管道外侧壁的焊接,还需要管道内壁进行焊接,由于管道内焊接其工作场景和环境不是一种非常理想的焊接条件,如果操作人员在焊接过程一个非平面场景操作,容易对操作人员形成危险,为了降低危险,增加管道内壁焊接的可靠性,特此设计一种管道内壁焊接行走机器人。
技术实现要素:
3.本发明的目的在于提供一种管道内壁焊接行走机器人,以解决上述技术问题,为实现上述目的本发明采用以下技术方案:一种管道内壁焊接行走机器人,包括行走架结构、焊接调整结构、固定焊接焊头结构,所述焊接调节结构固定在行走架结构的中心前侧面,所述固定焊接焊头结构设在行走架结构的后侧面,且固定焊接焊头结构穿过行走架结构的中心与焊接调整结构连接。
4.在上述技术方案基础上,所述行走架结构由结构中心架、一级减能连接臂、二级行走调整连接臂、双臂固定卡扣组成,所述一级减能连接臂、二级行走调整连接臂、双臂固定卡扣均设有四组,所述四组一级减能连接臂分别插接在四组二级行走调整连接臂的内侧端,且一级减能连接臂均通过双臂固定卡扣固定在二级行走调整连接臂内侧端,所述四组一级减能连接臂分别连接在结构中心架的外侧。
5.在上述技术方案基础上,所述焊接调整结构由固定外扒、外套臂、电机固载板、调整电动机组成,所述外套臂设有若干组,若干组外套臂呈等圆周角度的设在电机固载板的后侧面,所述固定外扒设在外套臂的后端内侧,所述固定外扒、外套臂、电机固载板一体成型,所述调整电动机固定在电机固载板的前侧面,所述电机固载板的中心开设有连接穿孔;所述固定焊接焊头结构穿过连接穿孔连接调整电动机,所述外套臂设在结构中心架的外侧面,所述电机固载板紧贴在结构中心架的前侧面,所述固定外扒设在结构中心架的后侧面。
6.在上述技术方案基础上,所述固定焊接焊头结构由焊条仿机夹、焊头支架、调整连接轴、进度弹簧组成,所述调整连接轴设在焊头支架的底端前侧,所述焊条仿机夹连接在焊头支架上,且焊条仿机夹可在焊头支架上上下滑动,所述进度弹簧的顶端固定在焊头支架的顶端后侧,进度弹簧的底端固定在焊条仿机夹的后端顶侧;所述调整连接轴依次穿过结构中心架和连接穿孔连接调整电动机,所述焊条仿机夹和焊头支架以调整连接轴为轴心可以转动。
7.在上述技术方案基础上,所述结构中心架由中心轴套、侧支筒、中心轴承组成,所
述侧支筒设有四组,四组侧支筒呈等圆周角度的设在中心轴套的外侧,且中心轴套、侧支筒一体成型,所述中心轴承设在中心轴套的中心,且中心轴承可在中心轴套的轴心转动,所述侧支筒的外侧端开设有减能连接筒槽;所述一级减能连接臂连接在减能连接筒槽内,且一级减能连接臂可在减能连接筒槽内抽动,所述调整连接轴连接在中心轴承上,所述外套臂设在中心轴套的外侧。
8.在上述技术方案基础上,所述一级减能连接臂由内端弹簧、外端套弹簧、承托板、减能支撑杆组成,所述承托板焊接在减能支撑杆的后侧端,所述外端套弹簧套置在减能支撑杆的后侧端,且外端套弹簧紧贴承托板的前侧面,所述内端弹簧紧贴在承托板的后侧面,所述二级行走调整连接臂由长短调整筒、轮架、行走轮组成,所述轮架焊接在长短调整筒的前侧端,所述行走轮连接在轮架上,所述减能支撑杆插接在长短调整筒内,所述减能支撑杆和长短调整筒上均开设有固定销孔,且减能支撑杆和长短调整筒上的固定销孔相互对应;所述双臂固定卡扣由外卡套、固定销子组成,所述固定销子设在外卡套的中心,所述固定销子穿过减能支撑杆和长短调整筒上的固定销孔,所述外卡套套置在长短调整筒的外侧,所述内端弹簧、外端套弹簧、承托板均设置在侧支筒外侧端的减能连接筒槽内,且承托板可在减能连接筒槽内滑动。
9.在上述技术方案基础上,所述焊条仿机夹由滑动架、后固定板、焊条头端板组成,所述后固定板设在滑动架的顶端后侧,所述焊条头端板设在滑动架的顶端前侧,且滑动架、后固定板、焊条头端板一体焊接,所述焊条头端板的中心开设有焊条穿孔,所述焊头支架由后滑套、弹簧轴、前夹板、焊机接电环组成,所述后滑套通过弹簧轴连接在前夹板的后侧面,所述焊机接电环设在前夹板的前侧面顶端,且前夹板、焊机接电环一体成型;所述后滑套套置在滑动架外侧,且后滑套可在滑动架外侧上下滑动,所述前夹板以弹簧轴为轴心可以转动,所述进度弹簧顶端固定在后固定板的底面,进度弹簧的底端固定在后滑套的顶面,所述调整连接轴与滑动架一体成型,所述前夹板的后侧面开设有焊条夹槽。
10.与现有技术相比,本发明具有以下优点:本发明优化了管道内壁焊接的设置,改变传统人工焊接的方式,采用一种可以在管道内行走的焊接机器人,降低了人工焊接的危险性,并且设备可以在多种工况的管道内进行焊接,设备采用可调节和减能伸缩的行走臂,减少焊接过程的抖动,本设备可以实现管道内的环形焊接,不具备死角的焊接方式,实用效果好,宜推广使用。
11.附图说明
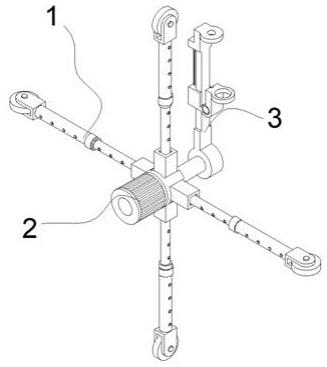
12.图1为本发明总体外观状态图。
13.图2为本发明拆分结构示意图。
14.图3为本发明行走架结构示意图。
15.图4为本发明焊接调整结构拆分后示意图。
16.图5为本发明固定焊接焊头结构示意图。
17.图6为本发明结构中心架示意图。
18.图7为本发明一级减能连接臂和二级行走调整连接臂示意图。
19.图8为本发明焊头支架示意图。
20.图9为本发明焊条仿机夹示意图。
21.图中:行走架结构1、焊接调整结构2、固定焊接焊头结构3;结构中心架1
‑
1、一级减能连接臂1
‑
2、二级行走调整连接臂1
‑
3、双臂固定卡扣1
‑
4;固定外扒2
‑
1、外套臂2
‑
2、电机固载板2
‑
3、调整电动机2
‑
4、连接穿孔2
‑
5;焊条仿机夹3
‑
1、焊头支架3
‑
2、调整连接轴3
‑
3、进度弹簧3
‑
4;中心轴套11
‑
1、侧支筒11
‑
2、中心轴承11
‑
3、能连接筒槽11
‑
4、内端弹簧12
‑
1、外端套弹簧12
‑
2、承托板12
‑
3、减能支撑杆12
‑
4、长短调整筒13
‑
1、轮架13
‑
2、行走轮13
‑
3、固定销孔13
‑
4、外卡套14
‑
1、固定销子14
‑
2;滑动架31
‑
1、后固定板31
‑
2、焊条头端板31
‑
3、焊条穿孔31
‑
4、后滑套32
‑
1、弹簧轴32
‑
2、前夹板32
‑
3、焊机接电环32
‑
4、焊条夹槽32
‑
5。
22.具体实施方式
23.下面结合附图和具体实施对本发明作进一步详细阐述。
24.一种管道内壁焊接行走机器人,包括行走架结构1、焊接调整结构2、固定焊接焊头结构3,所述焊接调节结构固定在行走架结构1的中心前侧面,所述固定焊接焊头结构3设在行走架结构1的后侧面,且固定焊接焊头结构3穿过行走架结构1的中心与焊接调整结构2连接。
25.所述行走架结构1由结构中心架1
‑
1、一级减能连接臂1
‑
2、二级行走调整连接臂1
‑
3、双臂固定卡扣1
‑
4组成,所述一级减能连接臂1
‑
2、二级行走调整连接臂1
‑
3、双臂固定卡扣1
‑
4均设有四组,所述四组一级减能连接臂1
‑
2分别插接在四组二级行走调整连接臂1
‑
3的内侧端,且一级减能连接臂1
‑
2均通过双臂固定卡扣1
‑
4固定在二级行走调整连接臂1
‑
3内侧端,所述四组一级减能连接臂1
‑
2分别连接在结构中心架1
‑
1的外侧。
26.所述焊接调整结构2由固定外扒2
‑
1、外套臂2
‑
2、电机固载板2
‑
3、调整电动机2
‑
4组成,所述外套臂2
‑
2设有若干组,若干组外套臂2
‑
2呈等圆周角度的设在电机固载板2
‑
3的后侧面,所述固定外扒2
‑
1设在外套臂2
‑
2的后端内侧,所述固定外扒2
‑
1、外套臂2
‑
2、电机固载板2
‑
3一体成型,所述调整电动机2
‑
4固定在电机固载板2
‑
3的前侧面,所述电机固载板2
‑
3的中心开设有连接穿孔2
‑
5,所述固定焊接焊头结构3穿过连接穿孔2
‑
5连接调整电动机2
‑
4,所述外套臂2
‑
2设在结构中心架1
‑
1的外侧面,所述电机固载板2
‑
3紧贴在结构中心架1
‑
1的前侧面,所述固定外扒2
‑
1设在结构中心架1
‑
1的后侧面。
27.所述固定焊接焊头结构3由焊条仿机夹3
‑
1、焊头支架3
‑
2、调整连接轴3
‑
3、进度弹簧3
‑
4组成,所述调整连接轴3
‑
3设在焊头支架3
‑
2的底端前侧,所述焊条仿机夹3
‑
1连接在焊头支架3
‑
2上,且焊条仿机夹3
‑
1可在焊头支架3
‑
2上上下滑动,所述进度弹簧3
‑
4的顶端固定在焊头支架3
‑
2的顶端后侧,进度弹簧3
‑
4的底端固定在焊条仿机夹3
‑
1的后端顶侧,所述调整连接轴3
‑
3依次穿过结构中心架1
‑
1和连接穿孔2
‑
5连接调整电动机2
‑
4,所述焊条仿机夹3
‑
1和焊头支架3
‑
2以调整连接轴3
‑
3为轴心可以转动。
28.所述结构中心架1
‑
1由中心轴套11
‑
1、侧支筒11
‑
2、中心轴承11
‑
3组成,所述侧支
筒11
‑
2设有四组,四组侧支筒11
‑
2呈等圆周角度的设在中心轴套11
‑
1的外侧,且中心轴套11
‑
1、侧支筒11
‑
2一体成型,所述中心轴承11
‑
3设在中心轴套11
‑
1的中心,且中心轴承11
‑
3可在中心轴套11
‑
1的轴心转动,所述侧支筒11
‑
2的外侧端开设有减能连接筒槽11
‑
4,所述一级减能连接臂1
‑
2连接在减能连接筒槽11
‑
4内,且一级减能连接臂1
‑
2可在减能连接筒槽11
‑
4内抽动,所述调整连接轴3
‑
3连接在中心轴承11
‑
3上,所述外套臂2
‑
2设在中心轴套11
‑
1的外侧。
29.所述一级减能连接臂1
‑
2由内端弹簧12
‑
1、外端套弹簧12
‑
2、承托板12
‑
3、减能支撑杆12
‑
4组成,所述承托板12
‑
3焊接在减能支撑杆12
‑
4的后侧端,所述外端套弹簧12
‑
2套置在减能支撑杆12
‑
4的后侧端,且外端套弹簧12
‑
2紧贴承托板12
‑
3的前侧面,所述内端弹簧12
‑
1紧贴在承托板12
‑
3的后侧面,所述二级行走调整连接臂1
‑
3由长短调整筒13
‑
1、轮架13
‑
2、行走轮13
‑
3组成,所述轮架13
‑
2焊接在长短调整筒13
‑
1的前侧端,所述行走轮13
‑
3连接在轮架13
‑
2上,所述减能支撑杆12
‑
4插接在长短调整筒13
‑
1内,所述减能支撑杆12
‑
4和长短调整筒13
‑
1上均开设有固定销孔13
‑
4,且减能支撑杆12
‑
4和长短调整筒13
‑
1上的固定销孔13
‑
4相互对应,所述双臂固定卡扣1
‑
4由外卡套14
‑
1、固定销子14
‑
2组成,所述固定销子14
‑
2设在外卡套14
‑
1的中心,所述固定销子14
‑
2穿过减能支撑杆12
‑
4和长短调整筒13
‑
1上的固定销孔13
‑
4,所述外卡套14
‑
1套置在长短调整筒13
‑
1的外侧,所述内端弹簧12
‑
1、外端套弹簧12
‑
2、承托板12
‑
3均设置在侧支筒11
‑
2外侧端的减能连接筒槽11
‑
4内,且承托板12
‑
3可在减能连接筒槽11
‑
4内滑动。
30.所述焊条仿机夹3
‑
1由滑动架31
‑
1、后固定板31
‑
2、焊条头端板31
‑
3组成,所述后固定板31
‑
2设在滑动架31
‑
1的顶端后侧,所述焊条头端板31
‑
3设在滑动架31
‑
1的顶端前侧,且滑动架31
‑
1、后固定板31
‑
2、焊条头端板31
‑
3一体焊接,所述焊条头端板31
‑
3的中心开设有焊条穿孔31
‑
4,所述焊头支架3
‑
2由后滑套32
‑
1、弹簧轴32
‑
2、前夹板32
‑
3、焊机接电环32
‑
4组成,所述后滑套32
‑
1通过弹簧轴32
‑
2连接在前夹板32
‑
3的后侧面,所述焊机接电环32
‑
4设在前夹板32
‑
3的前侧面顶端,且前夹板32
‑
3、焊机接电环32
‑
4一体成型,所述后滑套32
‑
1套置在滑动架31
‑
1外侧,且后滑套32
‑
1可在滑动架31
‑
1外侧上下滑动,所述前夹板32
‑
3以弹簧轴32
‑
2为轴心可以转动,所述进度弹簧3
‑
4顶端固定在后固定板31
‑
2的底面,进度弹簧3
‑
4的底端固定在后滑套32
‑
1的顶面,所述调整连接轴3
‑
3与滑动架31
‑
1一体成型,所述前夹板32
‑
3的后侧面开设有焊条夹槽32
‑
5。
31.本发明工作原理:设备的使用方式简单,主要分为不同管径调整和焊头的使用和调整。
32.一为不同管径的调整,在使用时需要根据管径的大小调整二级行走调整连接臂与一级减能连接臂的连接,并且使其四组二级行走调整连接臂的连接深度都相同,具体为让减能支撑杆插入到长短调整筒内,然后利用固定销子插入到固定销孔内,并且使其外卡套套置在长短调整筒的外侧,防止二级行走调整连接臂从一级减能连接臂外侧脱落,在行进过程中一级减能连接臂内侧端的内端弹簧和外端套弹簧可以起到很好的缓冲减震的作用。
33.二为焊头的使用和调整,需要将固定焊接焊头结构与焊接调整结构进行连接,当需要进行角度调整的时候,调整电动机驱动,带动调整连接轴的转动,与调整连接轴一体的焊头支架会跟随调整连接轴的转动而转动,将焊接的末端放置在前夹板的焊条夹槽内,然后将其焊条的顶端穿过焊条穿孔,将焊机需要连接的电源线连接在焊机接电环上,在管道
内,使其焊条的外端紧贴在焊接位置,此时的进度弹簧被拉伸,在逐渐焊接过程中,焊条逐渐变短,此时的进度弹簧会拉动后滑套移动,并且带动焊条递进。
34.以上所述为本发明较佳实施例,对于本领域的普通技术人员而言,根据本发明的教导,在不脱离本发明的原理与精神的情况下,对实施方式所进行的改变、修改、替换和变型仍落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1