减速装置和齿轮马达的制作方法
1.本发明涉及减速装置和齿轮马达。
背景技术:
2.近年来,随着智能手机等电子设备的精密化,正在进行更小型且高性能的齿轮马达的开发。作为齿轮马达,已知有在马达上连接有包含多级行星齿轮减速机构的齿轮箱(减速装置)的齿轮马达(专利文献1)。
3.专利文献1:日本特开2019-49325号公报
4.在具有多级行星齿轮机构的减速机构中,随着接近输出侧而传递的扭矩变大,因而需要确保各齿轮的强度。另一方面,从追求小型化的必要性来看,要求减小各齿轮的齿宽。即,在减速机构中,要求同时实现齿轮的强度确保和小型化。
技术实现要素:
5.本发明的一个方式的目的之一在于,提供能够在确保齿轮的强度的同时实现小型化的减速装置和齿轮马达。
6.本发明的一个方式为减速装置,其具有:内齿齿轮,其以中心轴线为中心而沿轴向延伸;第1太阳齿轮,其配置在所述内齿齿轮的内侧,以中心轴线为中心;第1行星齿轮,其与所述第1太阳齿轮和所述内齿齿轮啮合;以及第1轮架,其从轴向一侧支承所述第1行星齿轮而使所述第1行星齿轮能够旋转。所述第1轮架具有第1对置面,该第1对置面与所述第1行星齿轮在轴向上对置。在所述第1对置面设置有凹部,从轴向观察时,该凹部与所述第1行星齿轮的齿面的通过轨迹重叠。
7.本发明的一个方式为齿轮马达,其具有上述减速装置和马达主体。所述减速装置与所述马达主体连接。
8.根据本发明的一个方式,提供了能够在确保齿轮的强度的同时实现小型化的减速装置和齿轮马达。
附图说明
9.图1是一个实施方式的齿轮马达的剖视图。
10.图2是一个实施方式的齿轮马达的分解立体图。
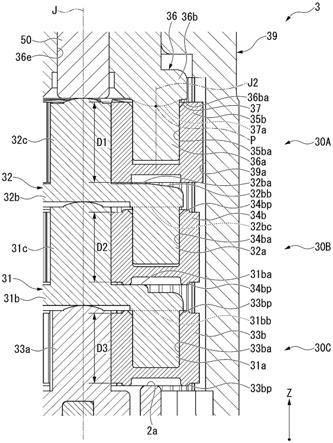
11.图3是图1的局部放大图。
12.图4是一个实施方式的第1轮架的立体图。
13.图5是变形例的第1轮架的立体图。
14.标号说明
15.1:齿轮马达;2:马达主体;3:减速装置;31:第3轮架;31c:第2太阳齿轮;32:第2轮架;32b:第2圆盘部(圆盘部);32ba:第2对置面;32bb:锥形部;32c:第1太阳齿轮;33a:第3太阳齿轮;33b:第3行星齿轮;33bp、34bp:凸条部;34b:第2行星齿轮;35b:第1行星齿轮;36、
136:第1轮架;36a:第1副轴(副轴);36ba、136ba:第1对置面;37、137:凹部;39a:内齿齿轮;d1、d2、d3:齿宽;j:中心轴线;j2:中心;p:峰;cv:节圆。
具体实施方式
16.以下,参照附图对本发明的实施方式的齿轮马达进行说明。另外,本发明的范围并不限定于以下的实施方式,能够在本发明的技术思想的范围内任意地变更。
17.在附图中,示出了与中心轴线j平行的z轴。在以下的说明中,只要没有特别说明,将z轴方向简称为“轴向”或“上下方向”,将+z侧称为“轴向一侧”或“上侧”,将-z侧称为“轴向另一侧”或“下侧”。另外,本说明书中的上下方向是为了便于说明而设定的方向,并不限定齿轮马达使用时的姿势。并且,在以下的说明中,将绕中心轴线j的周向简称为“周向”,将相对于中心轴线j的径向简称为“径向”。
18.<齿轮马达>
19.图1是齿轮马达1的剖视图。图2是齿轮马达1的分解立体图。齿轮马达1具有马达主体2和与马达主体2连接的减速装置3。以下,对齿轮马达1的各部进行详细地说明。
20.<马达主体>
21.马达主体2的整体呈以中心轴线j为中心的圆柱状。在本实施方式中,马达主体2是步进马达。
22.如图1所示,马达主体2具有转子21和从径向外侧包围转子21的定子26。另外,马达主体2具有固定于转子21的马达轴22。
23.马达轴22以中心轴线j为中心而沿轴向延伸。在本实施方式中,马达轴22在马达主体2处向上侧突出。马达轴22与转子一起绕中心轴线j旋转。在马达轴22的上端固定有第3太阳齿轮33a。
24.<减速装置>
25.减速装置3位于马达主体2的上侧。减速装置3与马达主体2连接。减速装置3对从马达主体2输出的动力进行减速。减速装置3由第1行星齿轮机构30a、第2行星齿轮机构30b以及第3行星齿轮机构30c构成。从马达主体2输出的动力按照第3行星齿轮机构30c、第2行星齿轮机构30b以及第1行星齿轮机构30a的顺序传递,并在第1行星齿轮机构30a中输出。第3行星齿轮机构30c、第2行星齿轮机构30b以及第1行星齿轮机构30a从下侧朝向上侧依次排列。
26.减速装置3具有齿轮壳体39、第3太阳齿轮33a、3个第3行星齿轮33b、第3轮架31、3个第2行星齿轮34b、第2轮架32、3个第1行星齿轮35b以及第1轮架36。如后所述,齿轮壳体39具有内齿齿轮39a。另外,第3轮架31具有第2太阳齿轮31c。同样地,第2轮架32具有第1太阳齿轮32c。
27.第3太阳齿轮33a、第3行星齿轮33b、第3轮架31以及内齿齿轮39a构成第3行星齿轮机构30c。第2太阳齿轮31c、第2行星齿轮34b、第2轮架32以及内齿齿轮39a构成第2行星齿轮机构30b。第1太阳齿轮32c、第1行星齿轮35b、第1轮架36以及内齿齿轮39a构成第1行星齿轮机构30a。
28.齿轮壳体39具有内齿齿轮39a、底部39b以及轴承部39d。即,减速装置3具有内齿齿轮39a。内齿齿轮39a呈以中心轴线j为中心而沿轴向延伸的筒状。内齿齿轮39a与第3行星齿
轮33b、第2行星齿轮34b以及第1行星齿轮35b啮合。底部39b位于内齿齿轮39a的上侧的端部。从轴向观察时,在底部39b的中央设置有轴承部39d。轴承部39d从底部39b朝向上侧呈筒状延伸。轴承部39d是滑动轴承。轴承部39d在内周面处将后述的输出部36d支承为能够旋转。
29.第3太阳齿轮33a在第1太阳齿轮32c和第2太阳齿轮31c的下侧(轴向另一侧)配置于内齿齿轮39a的内侧。第3太阳齿轮33a以中心轴线j为中心。第3太阳齿轮33a固定于马达轴22,与马达轴22一起以中心轴线j为中心进行旋转。
30.3个第3行星齿轮33b沿中心轴线j的周向等间隔地配置。3个第3行星齿轮33b在径向上配置于第3太阳齿轮33a与内齿齿轮39a之间。3个第3行星齿轮33b与第3太阳齿轮33a和内齿齿轮39a啮合。3个第3行星齿轮33b随着第3太阳齿轮33a的旋转而绕中心轴线j公转旋转。在第3行星齿轮33b的中央设置有在上侧开口的保持孔33ba。
31.第3轮架31具有第3圆盘部31b、3根第3副轴31a以及第2太阳齿轮31c。第3圆盘部31b以中心轴线j为中心而沿径向延伸。第3圆盘部31b位于第2行星齿轮34b的下侧且第3行星齿轮33b的上侧。第3圆盘部31b与第2太阳齿轮31c连结。第3圆盘部31b呈与中心轴线j垂直的板状。第3圆盘部31b位于第3太阳齿轮33a和第3行星齿轮33b的上侧。3根第3副轴31a从第3圆盘部31b向下侧延伸。第2太阳齿轮31c以中心轴线j为中心而从第3圆盘部31b向上侧延伸。
32.第3副轴31a插入至第3行星齿轮33b的保持孔33ba中。3根第3副轴31a分别将第3行星齿轮33b支承为能够旋转。即,第3轮架31从上侧(轴向一侧)支承多个第3行星齿轮33b而使该多个第3行星齿轮33b能够旋转。第3轮架31随着3个第3行星齿轮33b的公转旋转而以中心轴线j为中心进行旋转。
33.第2太阳齿轮31c在第1太阳齿轮32c的下侧(轴向另一侧)配置于内齿齿轮39a的内侧。第2太阳齿轮31c以中心轴线j为中心。第2太阳齿轮31c由于是第3轮架31的一部分,因此随着第3行星齿轮33b的公转旋转而以中心轴线j为中心进行旋转。
34.3个第2行星齿轮34b沿中心轴线j的周向等间隔地配置。3个第2行星齿轮34b在径向上配置于第2太阳齿轮31c与内齿齿轮39a之间。3个第2行星齿轮34b与第2太阳齿轮31c和内齿齿轮39a啮合。3个第2行星齿轮34b随着第2太阳齿轮31c的旋转而沿中心轴线j的周向公转旋转。在第2行星齿轮34b的中央设置有在上侧开口的保持孔34ba。
35.第2轮架32具有第2圆盘部(圆盘部)32b、3根第2副轴32a以及第1太阳齿轮32c。第2圆盘部32b以中心轴线j为中心而沿径向延伸。第2圆盘部32b位于第1行星齿轮35b的下侧且第2行星齿轮34b的上侧。第2圆盘部32b与第1太阳齿轮32c连结。第2圆盘部32b呈与中心轴线j垂直的板状。第2圆盘部32b位于第2太阳齿轮31c和第2行星齿轮34b的上侧。3根第2副轴32a从第2圆盘部32b向下侧延伸。第1太阳齿轮32c以中心轴线j为中心而从第2圆盘部32b向上侧延伸。
36.第2副轴32a插入至第2行星齿轮34b的保持孔34ba中。3根第2副轴32a分别将第2行星齿轮34b支承为能够旋转。即,第2轮架32将多个第2行星齿轮34b支承为能够绕中心轴线j公转旋转。即,第2轮架32从上侧(轴向一侧)支承多个第2行星齿轮34b而使该多个第2行星齿轮34b能够旋转。第2轮架32随着3个第2行星齿轮34b的公转旋转而以中心轴线j为中心进行旋转。
37.第1太阳齿轮32c配置于内齿齿轮39a的内侧。第1太阳齿轮32c以中心轴线j为中心。第1太阳齿轮32c由于是第2轮架32的一部分,因此随着第2行星齿轮34b的公转旋转而以中心轴线j为中心进行旋转。
38.3个第1行星齿轮35b沿中心轴线j的周向等间隔地配置。3个第1行星齿轮35b在径向上配置于第1太阳齿轮32c与内齿齿轮39a之间。3个第1行星齿轮35b与第1太阳齿轮32c和内齿齿轮39a啮合。3个第1行星齿轮35b随着第1太阳齿轮32c的旋转而沿中心轴线j的周向公转旋转。在第1行星齿轮35b的中央设置有在上侧开口的保持孔35ba。
39.第1轮架36具有第1圆盘部36b、3根第1副轴(副轴)36a以及输出部36d。第1圆盘部36b以中心轴线j为中心而沿径向延伸。第1圆盘部36b呈与中心轴线j垂直的板状。第1圆盘部36b位于第1太阳齿轮32c和第1行星齿轮35b的上侧。3根第1副轴36a从第1圆盘部36b向下侧延伸。输出部36d以中心轴线j为中心而从第1圆盘部36b向上侧延伸。
40.第1副轴36a插入至第1行星齿轮35b的保持孔35ba中。3根第1副轴36a分别将第1行星齿轮35b支承为能够旋转。即,第1轮架36从上侧(轴向一侧)支承多个第1行星齿轮35b而使该多个第1行星齿轮35b能够旋转。第1轮架36随着3个第1行星齿轮35b的公转旋转而以中心轴线j为中心进行旋转。
41.输出部36d由于是第1轮架36的一部分,因此随着第1行星齿轮35b的公转旋转而以中心轴线j为中心进行旋转。输出部36d呈以中心轴线j为中心的柱状。输出部36d被齿轮壳体39的轴承部39d支承为能够旋转。输出部36d的上端部从齿轮壳体39的上端部向上侧突出。在输出部36d的上端部固定有将齿轮马达1的动力传递至其他机构的小齿轮(省略图示)等。
42.在第1轮架36上设置有沿着中心轴线j延伸的贯通孔36e。贯通孔36e在输出部36d的上端面和第1圆盘部36b的下端面处开口。贯通孔36e为以中心轴线j为中心的圆形。在贯通孔36e中插入有贯穿插入轴50。贯穿插入轴50的上端部从贯通孔36e的上端面突出。贯穿插入轴50的上端部被轴承部(省略图示)支承为能够旋转。贯穿插入轴50引导输出部36d绕中心轴线j的旋转。
43.图3是图1的局部放大图。
44.如图3所示,第1行星齿轮35b的上端面和下端面分别为平坦面。第1行星齿轮35b配置在第1圆盘部36b与第2圆盘部32b之间。第1圆盘部36b具有与第1行星齿轮35b在轴向上对置的第1对置面36ba。第1对置面36ba是朝向下侧的面。第2圆盘部32b具有与第1行星齿轮35b在轴向上对置的第2对置面32ba。第2对置面32ba是朝向上侧的面。
45.图4是第1轮架36的立体图。
46.如图4所示,第1副轴36a从第1对置面36ba向下侧(轴向另一侧)延伸出。在第1对置面36ba中,在第1副轴36a的周围设置有凹部37。即,在第1对置面36ba设置有多个(在本实施方式中为3个)凹部37。
47.从轴向观察时,凹部37呈以第1副轴36a为中心的圆形状。凹部37的直径比第1副轴36a的直径大。因此,凹部37包含从轴向观察时安装于第1副轴36a的第1行星齿轮35b。
48.根据本实施方式,从轴向观察时,凹部37与第1行星齿轮35b的齿面的通过轨迹重叠。由此,能够在抑制减速装置3的轴向尺寸增大的同时确保第1行星齿轮35b的齿宽(齿面沿着轴向的尺寸)较大。其结果为,能够抑制在第1行星齿轮35b的齿面产生的表面压力而提
高第1行星齿轮35b的强度。
49.凹部37具有朝向下侧(轴向另一侧)的底面37a。底面37a沿着中心轴线j的径向平滑地弯曲。这里,在底面37a上设想通过3个第1副轴36a的节圆cv。节圆cv通过3个第1副轴36a的中心j2。节圆cv是以中心轴线j为中心的假想的圆。底面37a以节圆cv为峰p而随着从节圆cv朝向中心轴线j的径向内侧和外侧而向上侧(轴向一侧)倾斜。
50.第1行星齿轮35b的上表面能够与第1轮架36的凹部37的底面37a接触。根据本实施方式,通过在底面37a上设置倾斜,第1行星齿轮35b的上端面仅在底面37a的倾斜的峰p处与底面37a接触。
51.从轴向观察时,第1行星齿轮35b的一部分从第1圆盘部36b的外缘向径向外侧突出。另外,从轴向观察时,第1行星齿轮35b的一部分与贯通孔36e重叠。因此,在底面37a为平面的情况下,在第1行星齿轮35b旋转时,有可能第1行星齿轮35b的齿面钩挂于第1圆盘部36b的外缘或内缘。
52.根据本实施方式,底面37a在比节圆cv靠径向外侧和内侧的位置处向随着朝向上侧而远离第1行星齿轮35b的方向倾斜。因此,在第1圆盘部36b的外缘和内缘与第1行星齿轮35b之间设置有上下方向的间隙,从而能够抑制第1行星齿轮35b的齿面钩挂于第1圆盘部36b的外缘和内缘。由此,能够实现第1行星齿轮35b的顺畅的旋转,从而能够提高第1行星齿轮35b的旋转效率。
53.根据本实施方式,底面37a将节圆cv作为峰p而沿着径向平滑地弯曲。因此,第1行星齿轮35b的上端面与底面37a的接触为线接触,通过抑制接触面积,能够降低滑动阻力。另外,由于底面37a平滑地弯曲,因此第1行星齿轮35b的上端面与底面37a的滑动变得顺畅,从而能够提高第1行星齿轮35b的旋转效率。
54.根据本实施方式,底面37a呈沿周向弯曲的平滑的凸状。第1圆盘部36的厚度在节圆cv处最大,随着朝向中心轴线j1的径向内侧和外侧而变小。即,第1轮架36在第1副轴36a所排列的节圆cv上刚性得到了提高。根据本实施方式,能够在实现减速装置3的轴向的尺寸的小型化的同时确保各部件的足够的强度。
55.如图3所示,第2圆盘部32b的第2对置面32ba在上下方向上与第1行星齿轮35b的下端面对置。在第2对置面32ba的外缘设置有随着远离中心轴线j而向下侧(轴向另一侧)倾斜的锥形部32bb。
56.从轴向观察时,第1行星齿轮35b的一部分从第2圆盘部32b的外缘向径向外侧突出。根据本实施方式,第2对置面32ba的外缘向随着朝向径向外侧而远离第1行星齿轮35b的方向倾斜。因此,在第2圆盘部32b的外缘与第1行星齿轮35b之间设置有上下方向的间隙,从而能够抑制第1行星齿轮35b的齿面钩挂于第2圆盘部32b的外缘。由此,能够实现第1行星齿轮35b的顺畅的旋转,从而能够提高第1行星齿轮35b的旋转效率。
57.第2行星齿轮34b配置在第2圆盘部32b与第3圆盘部31b之间。第2圆盘部32b具有与第2行星齿轮34b在轴向上对置的第3对置面32bc。第3对置面32bc是朝向下侧的面。第3圆盘部31b具有与第2行星齿轮34b在轴向上对置的第4对置面31ba。第4对置面31ba是朝向上侧的面。
58.在第2行星齿轮34b的上端面和下端面设置有凸条部34bp。凸条部34bp相对于第2行星齿轮34b的中心呈圆环状延伸。第2行星齿轮34b的上端面的凸条部34bp向上侧突出。另
一方面,第2行星齿轮34b的下端面的凸条部34bp向下侧突出。
59.根据本实施方式,第2行星齿轮34b在凸条部34bp处与第3对置面32bc和第4对置面31ba接触。因此,能够抑制第2行星齿轮34b的齿面与第3对置面32bc和第4对置面31ba接触,从而能够提高第2行星齿轮34b的旋转效率。另外,能够抑制伴随与第2行星齿轮34b的齿面的接触的滑动音的产生。
60.第3行星齿轮33b配置在第3圆盘部31b与马达主体2之间。第3圆盘部31b具有与第3行星齿轮33b在轴向上对置的第5对置面31bb。第5对置面31bb是朝向下侧的面。马达主体2具有与第3行星齿轮33b在轴向上对置的第6对置面2a。第6对置面2a是朝向上侧的面。
61.在第3行星齿轮33b的上端面和下端面设置有凸条部33bp。凸条部33bp相对于第3行星齿轮33b的中心呈圆环状延伸。第3行星齿轮33b的上端面的凸条部33bp向上侧突出。另一方面,第3行星齿轮33b的下端面的凸条部33bp向下侧突出。
62.根据本实施方式,第3行星齿轮33b在凸条部33bp处与第5对置面31bb和第6对置面2a接触。因此,能够抑制第3行星齿轮33b的齿面与第5对置面31bb以及第6对置面2a接触,能够提高第3行星齿轮33b的旋转效率。另外,能够抑制与第3行星齿轮33b的齿面的接触相伴的滑动音的产生。
63.在本实施方式中,在第2行星齿轮34b和第3行星齿轮33b的上端面和下端面设置有凸条部34bp、33bp。另一方面,第1行星齿轮35b的上端面和下端面是未设置凸条部的平坦面。另外,第1行星齿轮35b、第2行星齿轮34b以及第3行星齿轮33b的轴向的全长大致相等。因此,第2行星齿轮34b的齿宽d2和第3行星齿轮33b的齿宽d3比第1行星齿轮35b的齿宽d1小相当于凸条部34bp、33bp的高度的量。
64.马达主体2的动力按照第3行星齿轮机构30c、第2行星齿轮机构30b以及第1行星齿轮机构30a的顺序被减速。因此,对第1行星齿轮35b的齿面赋予的表面压力比对第2行星齿轮34b和第3行星齿轮33b的齿面赋予的表面压力大。根据本实施方式,通过使第1行星齿轮35b的齿宽d1比第2行星齿轮34b和第3行星齿轮33b的齿宽d2、d3大,能够抑制第1行星齿轮35b的损伤。
65.另一方面,第2行星齿轮34b和第3行星齿轮33b的转速比第1行星齿轮35b的转速快。因此,由第2行星齿轮34b和第3行星齿轮33b的旋转引起的滑动音比由第1行星齿轮35b的旋转引起的滑动音大。根据本实施方式,通过在第2行星齿轮34b和第3行星齿轮33b的上端面及下端面分别设置凸条部34bp、33bp,能够抑制减速装置3发出的滑动音。
66.(变形例)
67.图5是上述实施方式中能够采用的变形例的第1轮架136的立体图。
68.本变形例的第1轮架136与上述实施方式相比,凹部137的底面137a的结构是不同的。另外,对于与上述实施方式相同的方式的构成要素标注相同的标号,而省略其说明。
69.本变形例的第1轮架136与上述实施方式同样地具有第1圆盘部136b、3根第1副轴36a、输出部36d。第1副轴36a将第1行星齿轮35b支承为能够旋转。在第1圆盘部136b上具有朝向下侧的第1对置面136ba。第1对置面136ba与第1行星齿轮35b在轴向上对置。第1副轴36a从第1对置面136ba向下侧延伸出。在第1对置面136ba设置有从轴向观察时与第1行星齿轮35b的齿面的通过轨迹重叠的凹部137。凹部137具有朝向下侧(轴向另一侧)的底面137a。从轴向观察时,底面137a为以第1副轴36a为中心的圆形。
70.在本变形例中,底面137a随着远离第1副轴36a而向上侧倾斜。即,底面137a呈以第1副轴36a的中心j2为中心的锥形形状。根据本变形例,底面137a在第1副轴36a的基端附近与第1行星齿轮35b接触。因此,在底面137a与第1行星齿轮35b的齿面之间设置有上下方向的间隙,从而能够抑制第1行星齿轮35b的齿面钩挂于第1圆盘部136b的外缘和内缘。由此,能够实现第1行星齿轮35b的顺畅的旋转,从而能够提高第1行星齿轮35b的旋转效率。
71.根据本变形例,第1圆盘部136b随着接近第1副轴36a而变厚。因此,在第1副轴36a的基端部处能够提高第1圆盘部136b的刚性。
72.另外,本变形例的底面137a可以为具有一定的倾斜角的圆锥面形状,也可以为倾斜角发生变化而平滑地弯曲的圆顶形状。
73.以上,对本发明的实施方式和变形例进行了说明,但实施方式中的各结构及它们的组合等只是一例,在不脱离本发明的主旨的范围内,能够进行结构的附加、省略、置换以及其他变更。另外,本发明并不受实施方式限定。
74.例如,在上述实施方式中,对在第1、第2以及第3行星齿轮机构30a、30b、30c中,内齿齿轮被固定,从轮架输出从太阳齿轮输入的动力的情况。但是,减速装置所采用的行星齿轮机构只要是内齿齿轮、太阳齿轮以及轮架相对旋转的机构,则可以从任意一方输入并从任意一方输出。例如,也可以固定轮架,将从太阳齿轮输入的动力从内齿齿轮输出。另外,也可以具有切换输出的部分而使减速比变化的变速机构。
75.另外,在本实施方式中,马达主体20a、20b是步进马达。但是,作为马达主体,也可以采用其他结构的马达。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1