磁流变减振器程控双向电流驱动器
1.本发明涉及电流驱动器领域,具体涉及一种磁流变减振器程控双向电流驱动器。
背景技术:
2.磁流变减振器是基于磁流变材料的磁控力学特性开发的智能可控器件,在电流(磁场)作用下其阻尼或者刚度可以发生连续变化,具有结构简单、响应迅速、能耗低、动态范围大等优点,在汽车智能悬架减振和智能精密稳定平台等应用中具有重要的应用前景。
3.具有双向(正向和负向)电流调节功能的磁流变减振器(磁流变阻尼器和磁流变弹性体隔振器)其阻尼或刚度可以在正向电流作用下增大或在反向电流作用下减小,使得其在缓冲或低频隔振应用中具有显著的优势,从而受到越来越多的关注。其中,电流驱动器是实现磁流变减振器双向调节功能的关键元件,其可将控制策略给出的控制信号转化成电流信号实现减振器的驱动控制。
4.常规的电流驱动器仅能输出正向电流,无法实现电流的双向调节。而现有的全桥双向电流驱动电路又存在电流输出响应时间长、输出电流纹波大等问题,影响电流的控制时间和精度,使得驱动控制效果受限。另外,对于具有多个减振器的复杂减振系统,驱动器需具有多路输入与输出的功能,如何集成多路输出控制的电流驱动器、减少驱动系统体积、增加系统稳定性也是驱动器研究中亟待解决的问题。
技术实现要素:
5.有鉴于此,本发明的目的是克服现有技术中的缺陷,提供磁流变减振器程控双向电流驱动器,能够实时调节输出电流的大小和方向,具有电流输出范围宽,线性误差小,兼容多种控制方式且转换效率高的优点。
6.本发明的磁流变减振器程控双向电流驱动器,包括主控电路、电平转换电路、功率驱动电路以及电流采样电路;
7.所述主控电路,用于调整输出电流值与输入电流值之间的误差,使得输出电流值达到设定阈值;所述主控电路的第一输入端输入电流信号,所述主控电路的第二输入端与电流采样电路的输出端连接,所述主控电路的输出端与电平转换电路的输入端连接;
8.所述电平转换电路,用于对主控电路输出的调制信号进行电平转换与隔离;所述电平转换电路的输出端与功率驱动电路的输入端连接;其中,所述调制信号包括使能信号以及控制信号;
9.所述功率驱动电路,用于根据主控电路输出的调制信号调整输出电流的方向,使得输出电流的方向为目标方向;所述功率驱动电路的输出端与电流采样电路的输入端连接,所述功率驱动电路的输出端输出电流;
10.所述电流采样电路,用于采集输出电流并将输出电流输入到主控电路。
11.进一步,所述功率驱动电路包括桥式驱动电路、电感l1、电感l2、电容c1以及电容c2;所述桥式驱动电路包括mos管q1、mos管q2、mos管q3以及mos管q4;
12.mos管q1的栅极输入控制信号,mos管q1的漏极与电源连接,mos管q1的源极与mos管q2的漏极连接,mos管q2的源极接地,mos管q2的栅极输入控制信号;电感l1的一端与mos管q1的源极和mos管q2的漏极的公共连接点连接,电感l1的另一端通过采样电阻r1与输出接口连接;电容c1的一端接地,电容c1的另一端与仪表放大器u1的正相端连接,仪表放大器u1的反相端与采样电阻r1与输出接口的公共连接点连接;
13.mos管q3的栅极输入控制信号,mos管q3的漏极与电源连接,mos管q3的源极与mos管q4的漏极连接,mos管q4的源极接地,mos管q4的栅极输入控制信号;电感l2的一端与mos管q3的源极和mos管q4的漏极的公共连接点连接,电感l2的另一端通过采样电阻r2与输出接口连接;电容c2的一端接地,电容c2的另一端与仪表放大器u2的正相端连接,仪表放大器u2的反相端与采样电阻r2与输出接口的公共连接点连接。
14.进一步,所述控制信号为pwm控制信号。
15.进一步,还包括通信电路;所述通信电路包括第一通信电路、第二通信电路以及控制电平电路;
16.所述第一通信电路通过第一通信接口与主控电路通信连接,用于获取控制指令并将控制指令传输到主控电路;所述第二通信电路通过第二通信接口与主控电路通信连接,用于获取控制指令并将控制指令传输到主控电路;所述控制电平电路通过第三通信接口与主控电路通信连接,用于获取控制指令并将控制指令传输到主控电路。
17.进一步,所述第一通信电路为sci通信电路,所述第一通信接口为sci通信接口;所述第二通信电路为can通信电路,所述第二通信接口为can通信接口;所述第三通信接口为adc通信接口。
18.进一步,还包括供电电路;所述供电电路采用分级输出,用于为主控电路、电平转换电路、功率驱动电路、电流采样电路以及通信电路提供不同的工作电压。
19.进一步,所述主控电路包括芯片、仿真接口以及固件保存电路。
20.进一步,所述电平转换电路包括信号隔离电平转换芯片。
21.进一步,所述功率驱动电路有四路。
22.本发明的有益效果是:本发明公开的一种磁流变减振器程控双向电流驱动器,采用dsp作为主控芯片,使用sci与can总线通讯电路和控制电平信号采集接收控制平台的电流输出指令,输出pwm调制信号经过信号隔离保护电平转换调制后,通过控制功率驱动电路实现电流的输出与换向。采样电阻将流经电路的电流大小转换成对应的电压信号,经过电流采样电路放大滤波后由dsp主控芯片上集成的ad采集模块完成数模转换,得到反馈的电流值。dsp通过对反馈值和电流输出指令的设定值进行误差计算,并采用pid控制算法对差值进行实时调整,使电流输出值无限接近设定值,实现输出电流的闭环控制。进而实现多路同时输出且电流方向大小独立可变,电流输出范围为
‑
3a~3a,线性误差小于5%,系统响应速度快,转换效率高,在汽车智能悬架和智能精密稳定平台等应用中具有较高的实用价值。
附图说明
23.下面结合附图和实施例对本发明作进一步描述:
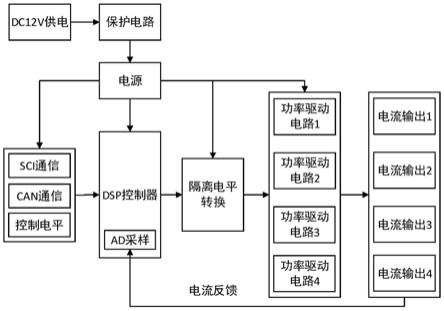
24.图1为本发明的电流驱动器系统示意图;
25.图2为本发明的功率驱动电路示意图;
26.图3为本发明的供电电路示意图;
27.图4为本发明的过压保护与防反接电路示意图;
28.图5为本发明的dsp主控电路示意图;
29.图6为本发明的通信电路示意图;
30.图7为本发明的电平转换电路示意图;
31.图8为本发明的电流采样电路示意图。
具体实施方式
32.以下结合说明书附图对本发明做出进一步的说明,如图所示:
33.本发明的磁流变减振器程控双向电流驱动器,包括主控电路、电平转换电路、功率驱动电路以及电流采样电路;
34.所述主控电路,用于调整输出电流值与输入电流值之间的误差,使得输出电流值达到设定阈值;所述主控电路的第一输入端输入电流信号,所述主控电路的第二输入端与电流采样电路的输出端连接,所述主控电路的输出端与电平转换电路的输入端连接;其中,所述主控电路为dsp主控电路。
35.所述电平转换电路,用于对主控电路输出的调制信号进行电平转换与隔离;所述电平转换电路的输出端与功率驱动电路的输入端连接;其中,所述调制信号包括使能信号以及控制信号;
36.所述功率驱动电路,用于根据主控电路输出的调制信号调整输出电流的方向,使得输出电流的方向为目标方向;所述功率驱动电路的输出端与电流采样电路的输入端连接,所述功率驱动电路的输出端输出电流;
37.所述电流采样电路,用于采集输出电流并将输出电流输入到主控电路。
38.其中,所述主控电路通过通信电路获取控制端或上位机下发的电流设定值,通过内部控制程序计算后经过电平转换电路输出对应的pwm调制信号到功率驱动电路,功率驱动电路输出对应方向和大小的反馈电流值施加于负载,所述负载为磁流变减振器,主控电路的a/d转换模块对反馈电流值进行采集,通过与电流设定值进行对比,并利用pid控制算法对电流设定值与反馈电流值之间的差值进行调整,完成对输出电流的闭环控制。
39.需要说明的是,本发明的磁流变减振器程控双向电流驱动器用于以磁流变材料为基础制成的减振器件的电流驱动中。
40.本实施例中,如图2所示,所述功率驱动电路包括桥式驱动电路、电感l1、电感l2、电容c1以及电容c2;所述桥式驱动电路包括mos管q1、mos管q2、mos管q3以及mos管q4;
41.mos管q1的栅极输入控制信号,mos管q1的漏极与电源连接,mos管q1的源极与mos管q2的漏极连接,mos管q2的源极接地,mos管q2的栅极输入控制信号;电感l1的一端与mos管q1的源极和mos管q2的漏极的公共连接点连接,电感l1的另一端通过采样电阻r1与输出接口连接;电容c1的一端接地,电容c1的另一端与仪表放大器u1的正相端连接,仪表放大器u1的反相端与采样电阻r1与输出接口的公共连接点连接;
42.mos管q3的栅极输入控制信号,mos管q3的漏极与电源连接,mos管q3的源极与mos管q4的漏极连接,mos管q4的源极接地,mos管q4的栅极输入控制信号;电感l2的一端与mos管q3的源极和mos管q4的漏极的公共连接点连接,电感l2的另一端通过采样电阻r2与输出
接口连接;电容c2的一端接地,电容c2的另一端与仪表放大器u2的正相端连接,仪表放大器u2的反相端与采样电阻r2与输出接口的公共连接点连接。其中,所述控制信号为pwm控制信号。
43.通过上述结构,在电流输出方向为正向时dsp主控电路的控制器控制pwm1导通和截至,pwm4为开启状态。当pwm1处于开启状态时,电路为l1和c1充能和输出,当pwm1截至周期时,经过死区时间后pwm2开启,然后构成续流回路。当电流输出方向为反向时,pwm2为导通状态,dsp主控电路控制pwm3的导通和截至,当pwm3导通时pwm4截至,电路为l2和c2充能和输出,pwm3截至经过死区时间电路pwm4导通构成续流回路。正向和负向输出电流值均由dsp主控电路的控制器通过pwm调制占空比实现。通过采样电阻将流经电流值转换成对应的电压,然后通过仪表放大器放大后输入到dsp主控电路的a/d转换模块,完成电流值的采集。通过与电流输出指令进行对比并利用pid控制算法完成对输出电流的闭环控制。
44.本实施例中,所述功率驱动电路有四路,从而使得本发明的电流驱动器具有多路输入与输出的功能。
45.本实施例中,还包括供电电路;所述供电电路采用外置12v电源或者汽车蓄电池供电,通过与电路保护电路连接实现供电电路的过压、反接保护。所述供电电路采用分级输出,用于为主控电路、电平转换电路、功率驱动电路、电流采样电路以及通信电路提供不同的工作电压。其中,功率驱动电路使用12v电压。如图3所示,供电电路包括u10降压芯片组成的12v转5v电路,连接到从保护电路输出将输入12v电源转换为5v,并为通信电路以及电流采样电路供电。线性降压芯片u11与u10输出的5v连接,对其二次降压至3.3v和1.8v,为主控电路以及电平转换电路供电。
46.其中,如图4所示,本发明的电流驱动器设计的过压保护与防反接电路。所述过压保护包括稳压二极管d13、p型三极管q4、q3为p沟道mosfet以及电阻,当电压超过稳压二极管d13的最大电压后,三极管截至,从而q3截至使电路断开实现过压保护。所述当反接电路包括r154以及q2,电路连接正确时,正负极的压差会使q2导通,使电路构成回路。如果正负极连接错误,则q2截至,防止后级电路损坏。
47.本实施例中,如图5所示的dsp主控电路包括tms320f28035pgnp芯片最小核心电路,jtag在线调试仿真接口以及eeprom固件保存电路;所述jtag在线调试仿真接口用于连接仿真器实现程序下载和调试;所述eeprom固件保存电路与dsp核心连接,用于保存程序固件和设置参数。
48.本实施例中,如图6所示的通信电路包括sci通信电路以及can通信电路,其中,sci通信电路通过u5隔离器件连接dsp主控电路,接收串口通信指令;can通信电路为u3组成的can收发器件,与控制端或上位机连接实现信号隔离和电平转换。通过使用串口通信和can协议与控制端或上位机连接,控制dsp主控电路接收电流输出指令并驱动功率驱动电路完成电流输出。为了保证通信电路能够稳定可靠地接收控制端或上位机下发的控制指令,所述通信电路还包括控制电平电路,所述控制电平电路获取使用dsp主控电路的adc接口,并通过adc接口获取外部控制电平的模拟信号,经过dsp主控电路处理后由驱动器输出对应电流,输出电流与输入电平信号比例可用于编程设计。
49.本实施例中,所述电平转换电路包括信号隔离电平转换芯片。如图7所示的电平转换电路通过u8对dsp核心电路输出的pwm控制信号进行电平转换和隔离,增强dsp核心的io
口的驱动能力,将3.3v转换成5v电平信号,连接到功率驱动电路。
50.本实施例中,如图8所示的电流采样电路连接到功率驱动电路中采样电阻的上下两端,采集采样电阻两端的电压差,然后通过仪表放大器将其放大后经过低通滤波输入到dsp主控电路的a/d转换模块,完成反馈电流值的采集。
51.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1