一种用于管道运输安装机器人的行走轮支架的制作方法
1.本发明属于管道非开挖修复设备技术领域,具体涉及管道运输安装机器人的行走轮支架。
背景技术:
2.地下管网的更新与修复是目前市政基础设施建设的重点和难点,城市地下管网普遍深埋地下,传统修复模式需封锁交通、开挖路面、更换管道、回填作业面、修复道路等,代价巨大且直接影响到城市交通、企业生产,同时存在噪音污染、安全隐患。目前管道非开挖修复技术在我国也逐渐推广使用,受到重视。由于管道空间狭窄,施工人员在管道内施工受限,使得各式各样的管道机器人大量投入使用。
3.新型管道运输安装机器人属于重型机器人,可实现快速运输管道、快速安装管道的功能。机器人整体结构复杂,造价高,而工程修复的管道直径种类多,所以需要一种可调节角度的行走轮,可满足管道运输安装机器人在不同直径的待修复管道内行走,且能满足管道安装过程中对管道水平位置调整的功能需求。综上所述,设计一种新型的行走轮支架是十分必要的。
技术实现要素:
4.本发明提出了一种用于管道运输安装机器人的行走轮支架,为新型的管道运输安装机器人提供了调整行走轮角度的功能,使其能够适应各种不同直径的管道,并且实现在进行管道对接安装时调整管道的水平位置的功能。
5.本发明解决其技术问题所采用的技术方案是:一种用于管道运输安装机器人的行走轮支架,包括内侧固定型支架、外侧活动型支架、可调节式行走轮机构、滑块导轨机构、限位块、驱动机构、传动机构,所述的外侧活动型支架通过滑块导轨机构连接在内侧固定型支架上;所述的内侧固定型支架是由钢板焊接而成的中空的方形柱状结构,所述的外侧活动型支架是由钢板焊接而成的中空的方形柱状结构,滑块导轨机构中的导轨通过螺栓连接在内侧固定型支架的上表面,滑块导轨机构中的滑块通过螺栓连接在外侧活动型支架的内侧,将滑块装入导轨,使外侧活动型支架连接在内侧固定型支架上,所述的外侧活动型支架嵌套在内侧固定型支架外部,所述的限位块通过螺栓连接在导轨的两侧;所述的外侧活动型支架可通过焊接或螺栓连接的方式与管道运输安装机器人的其它部件相连接;所述的可调节式行走轮机构共有两组,设置在内侧固定型支架的两侧;所述的驱动机构设置在外侧活动型支架的上方;所述的传动机构设置在内侧固定型支架的内部,并连接到驱动机构上。
6.进一步的,所述的可调节式行走轮机构包括蜗轮、蜗杆、蜗杆用轴承、第一电机、行走轮、行走轮安装板、行走轮安装轴、行走轮安装轴用轴承,所述的蜗杆一端固定在内侧固定型支架的安装孔上,另一端装入蜗杆用轴承并通过螺栓安装在内侧固定型支架的安装孔上,所述的第一电机固定在蜗杆上方,所述的行走轮安装轴用轴承通过螺栓连接在内侧固定型支架一端的两侧,所述的行走轮安装轴穿过一个行走轮安装轴用轴承、一个蜗轮以及
另一个行走轮安装轴用轴承后固定在内侧固定型支架上,所述的行走轮安装板是一块平板上方带有凸台的结构,凸台中有一个贯穿凸台的圆孔,行走轮安装板上的圆孔穿入行走轮安装轴,固定安装在行走轮安装轴两侧,所述的行走轮通过螺栓连接在行走轮安装板上。
7.进一步的,所述的传动机构包括齿条、齿轮、齿轮轴、齿轮轴用轴承、轴承安装板、减速机连接轴,所述的齿条通过螺栓连接在内侧固定型支架的内部,所述的齿轮固定在齿轮轴上,所述的齿轮轴用轴承通过螺栓连接在轴承安装板上,所述的轴承安装板通过螺栓连接在外侧活动型支架上,所述的齿轮轴连接在齿轮轴用轴承上,所述的减速机连接轴固定在齿轮轴的上方。
8.进一步的,所述的驱动机构包括蜗轮蜗杆减速机、第二电机、蜗轮蜗杆减速机用安装板,所述的蜗轮蜗杆减速机用安装板通过螺栓连接在轴承安装板上,所述的蜗轮蜗杆减速机通过螺栓连接在蜗轮蜗杆减速机用安装板上,所述的第二电机固定在蜗轮蜗杆减速机的输入轴上。
9.进一步的,所述的第一电机和第二电机的电源及控制系统安装在管道运输安装机器人的其它机构中。
10.本发明的有益效果为:(1)本发明提供的行走轮支架,通过设置在内侧固定型支架两端的可调节式行走轮机构实现了任意调节行走轮角度的功能。在平地行走时可调节行走轮竖直,在不同直径的管道内行走时可调节行走轮垂直管道内壁。该机构使用蜗轮蜗杆传动,有很好的自锁功能,调节角度后行走轮的角度不会受外力改变,有很高的安全性,这样既解决了竖直安装的行走轮在管道内行走时容易损坏的问题,又大大提高了行走轮支架的通用性;(2)本发明提供的行走轮支架,通过驱动机构、传动机构、滑块导轨机构的相互作用实现了管道运输安装机器人左右横向平移调节的功能,在管道对接时可通过调整机器人的水平位置来调整管道的水平位置,提高了管道安装的效率;(3)本发明提供的行走轮支架,可调节式行走轮机构与驱动机构由电机带动,与管道运输安装机器人上的其它配件配合可实现远程操作调节行走轮的角度、调节管道水平位置的功能,减轻了作业人员的劳动强度,提高了安装效率,同时为管道内衬管的安装提供了安全保障。
附图说明
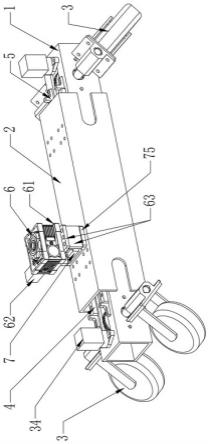
11.下面结合附图对本发明作进一步详细的说明:图1是本发明的结构示意图;图2是本发明的内侧固定型支架、传动机构、滑块导轨机构的示意图;图3是本发明的可调节式行走轮机构的示意图;图4是本发明在平底行走的示意图;图5是本发明在圆弧管道内行走的示意图;图6是本发明调节水平横移功能的示意图。
12.图中1.内侧固定型支架,2.外侧活动型支架,3.可调节式行走轮机构,4.滑块导轨机构,5.限位块,6.驱动机构,7.传动机构,31.蜗轮,32.蜗杆,33.蜗杆用轴承,34第一电机,35.行走轮,36.行走轮安装板,37.行走轮安装轴,38.行走轮安装轴用轴承,41.导轨,42.滑
块,61.蜗轮蜗杆减速机,62.第二电机,63.蜗轮蜗杆减速机用安装板,71.齿条,72.齿轮,73.齿轮轴,74.齿轮轴用轴承,75.轴承安装板,76.减速机连接轴。
具体实施方式
13.为了是本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,结合实施案例和附图,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。下面结合实施案例及附图详细说明本发明的技术方案,但保护范围不被此限制。
14.如图1至图6所示的一种用于管道运输安装机器人的行走轮支架,包括内侧固定型支架1、外侧活动型支架2、可调节式行走轮机构3、滑块导轨机构4、限位块5、驱动机构6、传动机构7,所述的外侧活动型支架2通过滑块导轨机构4连接在内侧固定型支架1上。
15.所述的内侧固定型支架1是由钢板焊接而成的中空的方形柱状结构,所述的外侧活动型支架2是由钢板焊接而成的中空的方形柱状结构,滑块导轨机构4中的导轨41通过螺栓连接在内侧固定型支架1的上表面,滑块导轨机构4中的滑块42通过螺栓连接在外侧活动型支架2的内侧,将滑块42装入导轨41,使外侧活动型支架2连接在内侧固定型支架1上,所述的外侧活动型支架2嵌套在内侧固定型支架1外部,所述的限位块5通过螺栓连接在导轨41的两侧。
16.所述的外侧活动型支架2可通过焊接或螺栓连接的方式与管道运输安装机器人的其它部件相连接。
17.所述的可调节式行走轮机构3共有两组,设置在内侧固定型支架1的两侧。可调节式行走轮机构3包括蜗轮31、蜗杆32、蜗杆用轴承33、第一电机34、行走轮35、行走轮安装板36、行走轮安装轴37、行走轮安装轴用轴承38,所述的蜗杆32一端固定在内侧固定型支架1的安装孔上,另一端装入蜗杆用轴承33并通过螺栓安装在内侧固定型支架1的安装孔上,所述的第一电机34固定在蜗杆32上方,所述的行走轮安装轴用轴承38通过螺栓连接在内侧固定型支架1一端的两侧,所述的行走轮安装轴37穿过一个行走轮安装轴用轴承38一个蜗轮31以及另一个行走轮安装轴用轴承38后固定在内侧固定型支架1上,所述的行走轮安装板36是一块平板上方带有凸台的结构,凸台中有一个贯穿凸台的圆孔,行走轮安装板36上的圆孔穿入行走轮安装轴37,固定安装在行走轮安装轴37两侧,所述的行走轮35通过螺栓连接在行走轮安装板36上。
18.所述的驱动机构6设置在外侧活动型支架2的上方。驱动机构6包括蜗轮蜗杆减速机61、第二电机62、蜗轮蜗杆减速机用安装板63,所述的蜗轮蜗杆减速机用安装板63通过螺栓连接在轴承安装板75上,所述的蜗轮蜗杆减速机61通过螺栓连接在蜗轮蜗杆减速机用安装板63上,所述的第二电机62固定在蜗轮蜗杆减速机61的输入轴上。
19.所述的传动机构7设置在内侧固定型支架1的内部,并连接到驱动机构6上。传动机构7包括齿条71、齿轮72、齿轮轴73、齿轮轴用轴承74、轴承安装板75、减速机连接轴76,所述的齿条71通过螺栓连接在内侧固定型支架1的内部,所述的齿轮72固定在齿轮轴73上,所述的齿轮轴用轴承74通过螺栓连接在轴承安装板75上,所述的轴承安装板75通过螺栓连接在外侧活动型支架2上,所述的齿轮轴73连接在齿轮轴用轴承74上,所述的减速机连接轴76固定在齿轮轴73的上方。
20.所述的第一电机34和第二电机62的电源及控制系统安装在管道运输安装机器人的其它机构中。
21.本发明的工作原理为:如图4所示,控制内侧固定型支架1两端的第一电机34转动,第一电机34转动后蜗杆32带动蜗轮31转动,而蜗轮31与行走轮安装轴37固定在一起,行走轮安装板36也固定装在行走轮安装轴37上,所以行走轮35开始转动。将行走轮35调整成竖直状态,该状态下管道运输安装机器人可在平地上行走。因为蜗轮蜗杆传动具有自锁功能,行走轮安装轴37及蜗轮31本身不能自由转动,只能由蜗杆32带动,所以可调节式行走轮机构3本身具有良好的稳定性,行走轮35行走的过程中不会发生偏转。
22.如图5所示,控制内侧固定型支架1两端的第一电机34,将行走轮35调整成垂直于管道内圆弧面的状态,该状态下管道运输安装机器人可在管道的内圆弧面上行走。
23.如图6所示,控制第二电机62转动,蜗轮蜗杆减速机61带动减速机连接轴76转动,因为齿轮72、齿轮轴73及减速机连接轴76固定连接,所以齿轮72开始转动。齿轮72与齿条71互相啮合,而齿条71固定在内侧固定型支架1的内部,齿轮轴73通过齿轮轴用轴承74、轴承安装板75连接在外侧活动型支架2上,并且外侧活动型支架2通过滑块导轨机构4连接在内侧固定型支架1上。当齿轮72开始转动后齿轮72在齿条71上水平移动,从而带动外侧活动型支架2在内侧固定型支架1上水平移动。根据蜗轮蜗杆减速机61的特性,第二电机62不转动时外侧活动型支架2无法自发水平移动,所以该结构拥有良好的稳定性。外侧活动型支架2通过焊接或螺栓连接等方式与管道运输安装机器人的其它部件相连接。进行管道对接时,如果两根管道水平位置不对齐,可以控制外侧活动型支架2左右水平移动来调节新管道的水平位置。
24.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1