一种输煤智能清淤堵机器人的制作方法
1.本发明属于输煤管道清淤堵技术领域,具体涉及一种输煤智能清淤堵机器人。
背景技术:
2.以燃煤为动力的火力电厂需要通过传送带、落煤管道将煤粉或是煤泥定量传送到锅炉燃烧系统。在现有电厂的实际运用中,以煤泥作为燃料的比例占到80%以上,其中煤泥中的水分占比为16%左右。在输煤系统中经常出现落煤管道堵塞的问题,直接影响到电厂锅炉以及机组的运行安全可靠性,严重时必须停机,进行人工处理、疏通,具体过程为:运行人员根据设备运行现象作出堵煤判断,然后迅速到落煤管处倾听,以确定是哪个落煤管堵煤,然后迅速将堵塞的给煤机停止运行,锅炉拉大负压,以免捅煤孔喷烟、喷火、喷煤危及人身安全,采用钢筋、大锤敲打等方法疏通;根据堵煤的严重程度,处理人员的动作熟练程度,整个处理过程耗时从几分钟到几十分钟不等。每次处理堵煤的过程就是一次锅炉、汽机升降负荷的过程。频繁堵煤则锅炉势必频繁升降负荷,锅炉处在不断的变工况下运行,对锅炉使用寿命具有很大影响。这样不仅造成了停机损失,还需要投入大量的人力进行清淤,费时费力,而且危险系数高,增加了安全风险,且效率极低,具体的危害可总结以下几点:
3.(1)锅炉、汽机频繁的升降负荷,威胁机组的安全运行;
4.(2)锅炉的燃烧效率下降;
5.(3)上网电量下降,厂用电率升高;
6.(4)使锅炉各受热面磨损加剧,降低使用寿命;
7.(5)锅炉飞灰含碳量升高;
8.(6)清理堵煤易损伤落煤管的浇注料,造成下渣管堵塞,危及锅炉安全运行;
9.(7)运行人员的劳动强度加大,以及处理过程中人员吸入大量煤粉,严重影响运行人员的身体健康;
10.(8)现场卫生差,影响文明生产。
技术实现要素:
11.本发明克服了现有技术存在的不足,提供了一种输煤智能清淤堵机器人,在落煤管内部行走,沿落煤管道内部用专用清淤截齿钻头将淤堵的煤泥绞碎,完成落煤管的疏通,达到快速、安全地清除煤泥的目的。
12.为了解决上述技术问题,本发明采用的技术方案为:一种输煤智能清淤堵机器人,包括:钻头机构、机械臂、机身和行走机构,用于清淤堵的所述钻头机构安装于所述机械臂的一端,所述机械臂的另一端安装于柱状结构的所述机身的轴向前端,所述机身沿其周向均匀安装有多个所述行走机构,所述行走机构可沿垂直所述机身的轴向方向往复伸缩,所述行走机构用于压合于倾斜或者竖直设置的落煤管内壁上并沿所述落煤管的内壁行走。
13.系统停机状态时,通过检查孔将机器人放入落煤管道中,通过设置可伸缩的所述行走机构,使得所述行走机构压合于倾斜或者竖直设置的落煤管内壁,所述行走机构与落
煤管之间的摩擦力用于向钻头机构工作提供足够的稳定支撑,并随着所述行走机构在落煤管内壁上行走,钻头机构在机械臂的调控下完成落煤管内壁的清淤堵工作。
14.所述行走机构均包括:伸缩臂、履带、履带支撑梁和固定架,所述伸缩臂的一端与所述机身连接,所述伸缩臂的另一端均固定有固定架,所述固定架与所述履带支撑梁相固定,所述履带支撑梁上绕设有可转动的所述履带。
15.所述伸缩臂采用电动推杆,所述电动推杆的伸缩杆与所述固定架相固定,所述机身上开设有与相应的所述电动推杆相配合的贯穿孔,所述电动推杆可沿相对应的所述贯穿孔往复滑动,所述机身内安装有多个回弹部件,所述回弹部件与所述电动推杆一一对应,所述回弹部件与相应的所述电动推杆连接,所述回弹部件用于推动所述电动推杆向落煤管的内壁方向移动,当落煤管出现变形时,在不调节电动推杆的情况下,可以使得行走机构稳定的压合在落煤管的内壁上,防止机器人支撑不稳或者掉落。
16.所述钻头机构包括:截齿钻头和液压马达,所述截齿钻头可转动安装于所述机械臂的端部,所述液压马达用于驱动所述截齿钻头自转,所述液压马达为所述截齿钻头清淤堵提供足够的扭矩,所述机身内部安装有与所述液压马达连接的液压系统。
17.所述回弹部件包括:固定板a、压缩弹簧、滑杆、套管和固定板b,所述固定板b的一侧与所述电动推杆远离所述固定架的一端固定,所述套管与所述电动推杆的活塞杆同轴设置,所述套管的一端与所述固定板b的另一侧固定,所述滑杆的一端滑动套设于所述套管内,所述滑杆的另一端固定有所述固定板a,所述固定板a与所述机身相固定,所述滑杆和所述套管外部套设有所述压缩弹簧,所述压缩弹簧的一端与所述固定板b相固定,所述压缩弹簧的另一端与所述固定板a相固定。
18.所述履带支撑梁上均安装有:电机、转轴、固定支撑臂、驱动齿轮、伸缩梁、液压油缸和从动轮,所述固定支撑臂的一端与所述履带支撑梁的一端相固定,所述固定支撑臂的另一端转动安装有所述转轴,所述电机用于驱动所述转轴自转,所述转轴上固定套设有所述驱动齿轮,所述驱动齿轮与所述履带相啮合用于驱动所述履带转动,实现所述行走机构的行走功能,多个所述行走机构的电机采用同步电机,所述履带支撑梁的另一端滑动安装有所述伸缩梁,所述伸缩梁可沿所述履带支撑梁的延伸方向往复伸缩,所述伸缩梁的一端与所述液压油缸的活塞杆相固定,所述液压油缸的缸体与所述履带支撑梁相固定,所述伸缩梁的另一端转动安装有所述从动轮,所述从动轮与所述驱动齿轮相配合用于支撑所述履带,所述从动轮上设置有齿,所述从动轮与所述履带相啮合。
19.所述履带支撑梁上还安装有:上托轮和行走轮,所述履带支撑梁朝向所述落煤管内壁的一侧安装有若干个可自转的所述上托轮,所述履带支撑梁朝向所述机身的一侧安装有若干个可自转的所述行走轮,所述上托轮和所述行走轮用于支撑所述履带,使得所述履带平稳转动。
20.所述输煤智能清淤堵机器人还包括:终端控制器、控制系统、电缆、可视光源和摄像头,所述机身的前端安装有所述可视光源和所述摄像头,所述机身内安装有所述控制系统,根据清淤堵要求,结合机器人实际工作环境,编程人员编写控制文件,实现清淤整个过程的智能化,所述可视光源、所述摄像头均与所述控制系统电气连接,所述控制系统与设置于落煤管外部的所述终端控制器电气连接,所述电缆通过与外部电源连接向本机器人提供电力。
21.所述机械臂采用两轴万向连接结构,可以完成旋转功能,可在落煤管内多维度转动,以保证截齿钻头准确、高效地清理管道内堵塞煤泥。
22.所述机身的后端连接有安全绳,所述安全绳的另一端固定于落煤管外部,用于确保机器人安全。
23.本发明与现有技术相比具有以下有益效果。
24.一、本发明通过设计输煤智能清淤堵机器人,通过计算机控制机器人在落煤管内的行走和截齿钻头将煤泥绞碎,完成落煤管的疏通,达到快速、安全地清除煤泥的目的。
25.二、本发明通过伸缩臂控制行走机构沿垂直机身的轴向方向往复伸缩,行走机构压合于倾斜或者竖直设置的落煤管内壁上并沿落煤管的内壁行走,实现机器人在倾斜或者竖直设置的落煤管内的稳定支撑和行走功能。
26.三、本发明通过采用液压马达驱动截齿钻头转动进行清淤堵作业,为截齿钻头提供了足够大的扭矩。
27.四、本发明通过在伸缩臂的端部设置回弹部件,落煤管由于煤块的撞击会出现变形,当机器人行走至变形区域时,回弹部件会驱动履带紧密的压合在落煤管的内部,有效的防止了机器人支撑不稳或者掉落的问题。
附图说明
28.下面结合附图对本发明做进一步的说明。
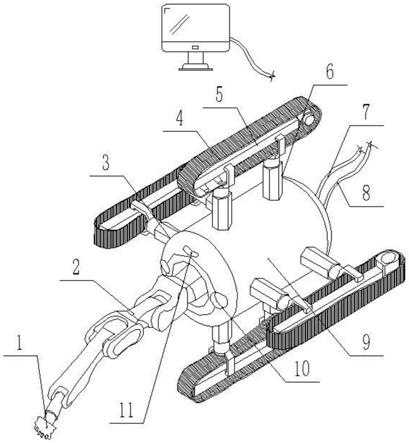
29.图1为本发明输煤智能清淤堵机器人的结构示意图。
30.图2为本发明伸缩臂的结构示意图。
31.图3为本发明伸缩臂的内部结构示意图。
32.图4为本发明履带和履带支撑梁的结构示意图。
33.图中:1为截齿钻头,2为机械臂,3为行走机构,4为履带,5为履带支撑梁,6为伸缩臂,7为安全绳,8为电缆,9为机身,10为可视光源,11为摄像头,12为回弹部件,121为固定板a,122为压缩弹簧,123为滑杆,124为套管,125为固定板b,13为转轴,14为固定架,15为贯穿孔,16为上托轮,17为固定支撑臂,18为驱动齿轮,19为行走轮,20为伸缩梁,21为从动轮。
具体实施方式
34.下面结合具体实施例做进一步的说明。
35.一种输煤智能清淤堵机器人,包括:钻头机构、机械臂2、机身9和行走机构3,用于清淤堵的所述钻头机构安装于所述机械臂2的一端,所述机械臂2的另一端安装于柱状结构的所述机身9的轴向前端,所述机身9沿其周向均匀安装有多个所述行走机构3,所述行走机构3可沿垂直所述机身9的轴向方向往复伸缩,所述行走机构3用于压合于倾斜或者竖直设置的落煤管内壁上并沿所述落煤管的内壁行走。
36.所述行走机构3均包括:伸缩臂6、履带4、履带支撑梁5和固定架14,所述伸缩臂6的一端与所述机身9连接,所述伸缩臂6的另一端均固定有固定架14,所述固定架14与所述履带支撑梁5相固定,所述履带支撑梁5上绕设有可转动的所述履带4。
37.所述行走机构3采用四组,四组所述行走机构3两两相对均匀设置于所述机身9周围,在工作中四条所述履带4同时向外延伸,支撑在落煤管道内壁上,给机械臂2工作提供足
够的稳定支撑,伸缩臂6的伸缩范围可在0~150mm内调节,在落煤管道内获得充分的支撑力同时便于行走。
38.所述伸缩臂6采用电动推杆,所述电动推杆的伸缩杆与所述固定架14相固定,所述机身9上开设有与相应的所述电动推杆相配合的贯穿孔15,所述电动推杆可沿相对应的所述贯穿孔15往复滑动,所述机身9内安装有多个回弹部件12,所述回弹部件12与所述电动推杆一一对应,所述回弹部件12与相应的所述电动推杆连接,所述回弹部件12用于推动所述电动推杆向落煤管的内壁方向移动。
39.所述钻头机构包括:截齿钻头1和液压马达,所述截齿钻头1可转动安装于所述机械臂2的端部,所述液压马达用于驱动所述截齿钻头1自转,所述液压马达为所述截齿钻头1清淤堵提供足够的扭矩,所述机身9内部安装有与所述液压马达连接的液压系统。
40.所述回弹部件12包括:固定板a121、压缩弹簧122、滑杆123、套管124和固定板b125,所述固定板b125的一侧与所述电动推杆远离所述固定架14的一端固定,所述套管124与所述电动推杆的活塞杆同轴设置,所述套管124的一端与所述固定板b125的另一侧固定,所述滑杆123的一端滑动套设于所述套管124内,所述滑杆123的另一端固定有所述固定板a121,所述固定板a121与所述机身9相固定,所述滑杆123和所述套管124外部套设有所述压缩弹簧122,所述压缩弹簧122的一端与所述固定板b125相固定,所述压缩弹簧122的另一端与所述固定板a121相固定。
41.所述履带支撑梁5上均安装有:电机、转轴13、固定支撑臂17、驱动齿轮18、伸缩梁20、液压油缸和从动轮21,所述固定支撑臂17的一端与所述履带支撑梁5的一端相固定,所述固定支撑臂17的另一端转动安装有所述转轴13,所述电机用于驱动所述转轴13自转,所述转轴13上固定套设有所述驱动齿轮18,所述驱动齿轮18与所述履带4相啮合,所述履带支撑梁5的另一端滑动安装有所述伸缩梁20,所述伸缩梁20可沿所述履带支撑梁5的延伸方向往复伸缩,所述伸缩梁20的一端与所述液压油缸的活塞杆相固定,所述液压油缸的缸体与所述履带支撑梁5相固定,所述伸缩梁20的另一端转动安装有所述从动轮21,所述从动轮21与所述驱动齿轮18相配合用于支撑所述履带4,所述从动轮21上设置有齿,所述从动轮21与所述履带4相啮合。
42.所述履带支撑梁5上还安装有:上托轮16和行走轮19,所述履带支撑梁5朝向所述落煤管内壁的一侧安装有若干个可自转的所述上托轮16,所述履带支撑梁5朝向所述机身9的一侧安装有若干个可自转的所述行走轮19,所述上托轮16和所述行走轮19用于支撑所述履带4。
43.所述输煤智能清淤堵机器人还包括:终端控制器、控制系统、电缆8、可视光源10和摄像头11,所述机身9的前端安装有所述可视光源10和所述摄像头11,所述机身9内安装有所述控制系统,根据清淤堵要求,结合机器人实际工作环境,编程人员编写控制文件,实现清淤整个过程的智能化,所述可视光源10、所述摄像头11均与所述控制系统电气连接,所述控制系统与设置于落煤管外部的所述终端控制器电气连接,所述电缆8通过与外部电源连接向本机器人提供电力。
44.所述机械臂2采用两轴万向连接结构,可以完成旋转功能,可在落煤管内多维度转动,以保证截齿钻头1准确、高效地清理管道内堵塞煤泥。
45.所述机身9的后端连接有安全绳7,所述安全绳7的另一端固定于落煤管外部,用于
确保机器人安全。
46.本机器人的基本性能:
47.工作电压:220v;
48.最大输出功率:1000w;
49.工作长度:≤20m;
50.爬坡能力:≤90
°
;
51.行走速度:≤3m/s;
52.截齿钻头1转速:800rpm/min;
53.机械臂2长、宽、高:900
×
90
×
90mm。
54.控制系统的运行过程:机器人前端有摄像头,并配有可视光源,摄像头采集落煤管中的淤堵图像,传送给控制系统,控制系统对图像进行识别和处理,将信号传输至终端控制器即计算机,通过计算机操控机器人将淤堵清理干净,并控制机器人返回检查孔,完成清淤堵作业。
55.上述实施方式仅示例性说明本发明的原理及其效果,而非用于限制本发明。对于熟悉此技术的人皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改进。因此,凡举所述技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1