一种油罐内壁检测机器人
1.本发明涉及智能检测技术领域,特别是涉及一种油罐内壁检测机器人。
背景技术:
2.大型立式油罐因压力的作用以及雨水和油品的侵蚀造成的缺陷若未被及时检验替换会造成人员和财产的巨大损失。
3.当前油罐的人工检测效率低,一致性差,环境及人为因素不可控,而且存在一定的危险。而机器人学是当今世界极为活跃的研究领域之一,作为一门集机械、电子和控制等多门学科于一体的学科,机器人的发展代表了一个国家的科技水平。机器人的高自动化技术使得它能够代替人类完成许多工作任务。随着科学技术和社会的发展,机器人的应用已不仅用于工业生产制造、航天探测等工业领域,它正逐渐深入到国民经济和人们的生活之中,极大的方便了人类的生活
4.现在市场上已经出现的大部分油罐检测机器人——吸附式爬壁机器人,机器人需要与壁面接触,对壁面要求较高,而且转向控制复杂,检测效率较低。
技术实现要素:
5.本发明的目的在于提供一种油罐内壁检测机器人,该智能检测机器人可极大的提高检测效率,检测无漏区,检测过程稳定,且控制简单,能够代替人来完成检测作业,提高检测的效率和质量,消除了人为操作的危险,具有极高的推广应用价值。
6.为实现上述目的,本发明提供如下技术方案:
7.一种油罐内壁检测机器人,包括机体、行走转向机构、升降检测机构、控制系统和座椅,所述行走转向机构位于机体的底部;所述升降检测机构位于机体的一侧;所述控制系统位于机体的上部;所述座椅位于机体的上部后侧;所述行走转向机构包括四个行走轮和四个行走电机;所述升降检测机构包括升降部和位于升降部一端的检测部,所述升降部通过z型连接板与所述机体连接;所述控制系统包括电源模块,所述电源模块为整个机器人提供电力,所述控制系统用以控制所述行走转向机构和升降检测机构进行相应的动作。
8.进一步地,所述行走轮的转轴安装在支撑轴承内,所述支撑轴承固定在所述机体上;转轴通过联轴器与所述行走电机连接。
9.进一步地,所述升降部包括固定块一、y轴移动电机、丝杠二、螺母、光杠一和滑块一,所述y轴移动电机安装在所述固定块一上,所述固定块一下方连接两个光杠一,所述滑块一安装在所述光杠一上;所述y轴移动电机下方通过联轴器连接丝杠二,所述螺母安装在所述丝杠二上,所述滑块一与所述螺母连接固定,所述滑块一固定在所述z型连接板上。
10.进一步地,所述升降部设置有两个限位传感器,所述限位传感器位于所述滑块一的上下安装面上。
11.进一步地,所述检测部包括固定块二、光杠二、滑块二、检测电机、丝杠三、固定块三、放置板、光杠三、喷头和探测器,所述固定块二连接两根光杠二,检测电机与滑块二连
8-光杠三,3-1-9-染料桶,3-1-10-水泵,3-1-11-喷头,3-1-12-探测器,3-2-升降部,3-2-1固定块一,3-2-2-y轴移动电机,3-2-3-丝杠二,3-2-4-螺母,3-2-5-光杠一,3-2-6-滑块一,3-3-z型连接板,3-4-x轴移动电机,3-5-丝杠一,3-6-导轨滑块,4-1-触摸显示屏,4-2-报警装置,4-3-触摸屏开关,4-4-指示灯,4-5-急停开关,4-6-总开关,4-7-模式切换开关,4-8-手动上升开关,4-9-手动下降开关。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
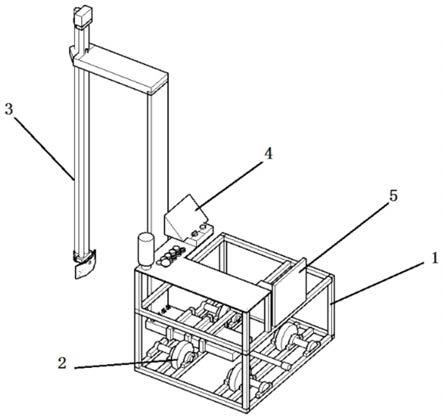
35.实施例1一种油罐内壁检测机器人,结构参照图1所示,包括机体1、行走转向机构2、升降检测机构3、控制系统4和座椅5,行走转向机构2位于机体1的底部;升降检测机构3位于机体1的一侧;控制系统4位于机体1的上部;座椅5位于机体1的上部后侧;
36.其中,参照图7所示,行走转向机构2包括四个行走轮2-1和四个行走电机2-4;行走轮2-1的转轴安装在支撑轴承2-2内,支撑轴承2-2固定在机体1上;转轴通过联轴器2-3与行走电机2-4连接。通过行走电机2-4的不同转向来实现不同方向的移动。
37.参照图2所示,升降检测机构3包括升降部3-2和位于升降部3-2一端的检测部3-1,升降部3-2通过z型连接板3-3与机体1连接;z型连接板3-3通过导轨滑块3-6滑动连接在机体1上,z型连接板3-3的一端通过丝杠一3-5与x轴移动电机3-4连接,x轴移动电机3-4固定在机体1上。
38.参照图3所示,升降部3-2包括固定块一3-2-1、y轴移动电机3-2-2、丝杠二3-2-3、螺母3-2-4、光杠一3-2-5和滑块一3-2-6,y轴移动电机3-2-2安装在固定块一3-2-1上,固定块一3-2-1下方连接两个光杠一3-2-5,滑块一3-2-6安装在光杠一3-2-5上;y轴移动电机3-2-2下方通过联轴器连接丝杠二3-2-3,螺母3-2-4安装在丝杠二3-2-3上,滑块一3-2-6与螺母3-2-4连接固定,滑块一3-2-6固定在z型连接板3-3上。光杠一3-2-5与滑块一3-2-6配合,一方面对y轴移动电机3-2-2起到支撑作用,另一方面可以让升降部更加稳定。
39.升降部3-2设置有限位传感器,限位传感器设置两个,限位传感器位于滑块一3-2-6的上下安装面上为光电传感器或接近开关;限位传感器用于给y轴移动电机3-2-2一个限位信号。
40.参照图4和图5所示,检测部3-1包括固定块二3-1-1、光杠二3-1-2、滑块二3-1-3、检测电机3-1-4、丝杠三3-1-5、固定块三3-1-6、放置板3-1-7、光杠三3-1-8、喷头3-1-11和探测器3-1-12,固定块二3-1-1连接两根光杠二3-1-2,检测电机3-1-4与滑块二3-1-3连接,滑块二3-1-3安装在光杠二3-1-2上;光杠二3-1-2的一端固定在固定块三3-1-6上,丝杠三3-1-5通过联轴器与检测电机3-1-4连接,固定块三3-1-6与丝杠三3-1-5上的螺母连接,丝杠三3-1-5的一端固定连接放置板3-1-7,放置板3-1-7通过光杠三3-1-8与固定块三3-1-6连接;放置板3-1-7为弧形面板,喷头3-1-11和探测器3-1-12置于放置板3-1-7上,其中探测器3-1-12可以是超声波探测器,探测器3-1-12的个数可以根据需要自行设置;喷头3-1-11通过软管与机体1上的水泵3-1-10的出水管连接,水泵3-1-10的进水管与染料桶3-1-9连
通。
41.控制系统4包括电源模块,电源模块为整个机器人提供电力,控制系统4用以控制行走转向机构2和升降检测机构3进行相应的动作。控制系统4还包括mega 2560 rev3开发板、电机控制板、通讯模块、降压模块和触摸显示屏4-1;控制系统4用以控制检测机器人进行相应的操作。触摸显示屏4-1采用昆仑通态触摸屏,通过压力感应进行控制。
42.参照图8所示,机体1的前侧还设置有控制操作平台,控制操作平台包括报警装置4-2、触摸屏开关4-3、指示灯4-4、急停开关4-5、总开关4-6和模式切换开关4-7。控制操作平台还包括手动上升开关4-8和手动下降开关4-9。控制操作平台与控制系统4电连接。其中,报警装置4-2由报警灯和蜂鸣器组成、当探头探测到壁面缺陷时,报警灯亮起,蜂鸣器发出报警声。急停开关4-5直接连接到总电源上,可进行紧急制动,可避免车身发生失控造成的损伤。总开关4-6用来控制总电路,模式切换开关4-7可以切换为自动模式或者手动模式,手动上升开关4-8可用于升降检测机构3的手动上升,手动下降开关4-9可用于升降检测机构3的手动下降,触摸屏开关4-3来控制触摸显示屏4-1的通电断电,触摸显示屏4-1显示实时数据,实时电量、实时坐标、缺陷个数等数据。
43.本发明油罐内壁检测机器人的电气控制原理,如图9所示。
44.本发明提供的一种油罐内壁检测机器人,其工作原理为:
45.首先,机器人移动至待检测油罐附近合适位置,y轴移动电机3-2-2带动丝杠二3-2-3向上移动,移动至检测部3-1高过油罐壁面高度,机器人继续向油罐方向移动至升降检测机构3伸入油罐。然后,y轴移动电机3-2-2带动丝杠二3-2-3反转,升降检测机构3向下运动,此时检测部3-1对壁面进行探测,探测过程中可以通过x轴移动电机3-4控制z型连接板3-3在x轴方向的伸缩,进而带动升降检测机构3上的检测部3-1靠近或远离油罐壁面,当探测至油罐壁面下端时,机器人小车绕油罐外壁转动一个检测宽度,控制升降检测机构3开始向上运动,探测器进行壁面探测。重复以上流程直至油罐检测完毕。在探测过程中,机器人探测到故障时会进行报警,报警灯亮起,工作人员可将报警信号与屏幕显示画面进行结合,来判断是什么故障,之后可通过检测部3-1上的喷头3-1-11进行标记。油罐内壁检测完毕,升降检测机构3向上运动至高过油罐壁面高度,机器人移动驶离油罐,升降检测机构3缩回至初始状态。该检测机器人中电机全部采用无刷减速电机防止火花产生,同时采用了外壳接地,有效防止静电产生。
46.以上实施例仅供说明本发明之用,而非对本发明的限制,有关技术领域的技术人员,在不脱离本发明的精神和范围的情况下,还可以作出各种变换或变化。本领域的普通技术人员,以本发明所明确公开的或根据文件的书面描述毫无异议的得到的,均应认为是本专利所要保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1