1.本公开涉及车辆用差动装置,例如使车辆的左右驱动轴或四轮驱动车辆的前后传动轴等配置在同轴上的两根驱动轴之间能够差动旋转,且向该两根驱动轴分配转矩。
背景技术:
2.在日本特开2019-7505中记载了以抑制加工工时的增加并且实现小型化为目的的差动装置的一例。该日本特开2019-7505所记载的差动装置具备:第一侧齿轮及第二侧齿轮,在旋转轴线方向上排列配置;小齿轮组,使多个小齿轮相互啮合而构成;及外壳,保持多个小齿轮。第一侧齿轮和第二侧齿轮通过小齿轮组以差动旋转的方式连结。小齿轮组具有与第一侧齿轮啮合的第一小齿轮和与第二侧齿轮啮合的多个第二小齿轮。第一小齿轮和多个第二小齿轮相互平行地配置,并被保持于外壳。第一小齿轮具有与第一侧齿轮啮合的第一齿轮部和与多个第二小齿轮啮合的第二齿轮部。第一齿轮部形成于第一小齿轮的旋转轴线方向上的一个端部侧。第二齿轮部形成于第一小齿轮的旋转轴线方向上的另一个端部侧。多个第二小齿轮配置于在第二侧齿轮的周向上相互分离的位置,并分别与第二侧齿轮啮合。并且,第一小齿轮的第二齿轮部在相当于第二侧齿轮的径向外侧的位置处与多个第二小齿轮啮合。
技术实现要素:
3.上述日本特开2019-7505所记载的差动装置作为在左右的驱动轴之间、或者四轮驱动车辆的前后的传动轴之间允许差动旋转且分配转矩的装置而搭载于车辆。为了使向车辆的搭载变得容易,优选使装置的体积尽可能地小型化。根据日本特开2019-7505所记载的差动装置,由于第一小齿轮和第二小齿轮在第二侧齿轮的外周侧啮合,因此与如现有技术那样两个小齿轮在比侧齿轮靠旋转轴线方向的外侧啮合的情况相比,能够使旋转轴线方向上的装置尺寸小型化。但是,日本特开2019-7505所记载的差动装置中,三个小齿轮组合而成的小齿轮组在第一侧齿轮及第二侧齿轮的周向上设有三组。因此,日本特开2019-7505所记载的差动装置使用9个小齿轮和2个侧齿轮共计11个齿轮。因此,在日本特开2019-7505所记载的差动装置中,虽然如上所述能够使旋转轴线方向上的装置尺寸小型化,但必须使用大量的齿轮。其结果是,部件个数及组装工时变多,相应地成本增大。另外,由于大量的小齿轮配置于侧齿轮的外周侧,因此不容易使径向上的装置尺寸小型化。其结果是,有可能无法使装置整体的体积充分地小型化。
4.本公开提供一种车辆用差动装置,紧凑且结构简单,容易搭载于车辆。
5.根据本公开的一个方式,提供一种车辆用差动装置,包括:第一驱动轴和第二驱动轴,彼此配置在同一旋转轴线上,并且彼此能够相对旋转;差动旋转机构,能够进行第一驱动轴与第二驱动轴之间的差动旋转;及转矩输入构件,配置在所述旋转轴线上,驱动转矩从规定的动力源输入该转矩输入构件。在车辆用差动装置中,所述驱动转矩被分配并传递给所述第一驱动轴和所述第二驱动轴。
6.所述差动旋转机构的特征在于,包括:输入齿轮,配置在所述旋转轴线上,与所述转矩输入构件一体地旋转;输出齿轮,配置在所述旋转轴线上,与所述第一驱动轴一体地旋转;第一齿轮和第二齿轮,彼此配置在同轴上且一体地旋转;及行星架,配置在所述旋转轴线上,将所述第一齿轮和所述第二齿轮以能够自转且能够绕所述旋转轴线公转的方式进行支承,并与所述第二驱动轴一体地旋转,所述输入齿轮与所述第一齿轮啮合,所述输出齿轮与所述第二齿轮啮合,所述输入齿轮与所述第一齿轮之间的齿数比(第一齿数比)和所述输出齿轮与所述第二齿轮之间的齿数比(第二齿数比)互不相同,在所述第一驱动轴的转速与所述第二驱动轴的转速彼此相等的情况下,将所述驱动转矩等分地传递给所述第一驱动轴和所述第二驱动轴(即,使所述第一驱动轴和所述第二驱动轴一体地旋转),在所述第一驱动轴和所述第二驱动轴差动旋转时,使所述第一驱动轴和所述第二驱动轴彼此向相反方向相对旋转(彼此反转)。
7.另外,根据本公开,在设所述第一齿轮的齿数为z1、所述第二齿轮的齿数为z2、所述输入齿轮的齿数为z3、所述输出齿轮的齿数为z4的情况下,下式成立:
8.1/(1-z3/z1×
z2/z4)=-1。
9.另外,根据本公开,在设所述第一齿轮的齿数为z1、所述第二齿轮的齿数为z2、所述输入齿轮的齿数为z3、所述输出齿轮的齿数为z4的情况下,下式成立:
[0010]-2<1/(1-z3/z1×
z2/z4)<-1。
[0011]
另外,也可以构成为,本公开中的所述输入齿轮是外齿轮的第一太阳齿轮,所述输出齿轮是外齿轮的第二太阳齿轮,所述第一齿轮是在与所述第一太阳齿轮啮合的同时在所述第一太阳齿轮的外周部分公转的第一小齿轮(行星齿轮),所述第二齿轮是在与所述第二太阳齿轮啮合的同时在所述第二太阳齿轮的外周部分公转的第二小齿轮(行星齿轮)。
[0012]
另外,也可以构成为,本公开中的所述第一太阳齿轮的外径大于所述第二太阳齿轮的外径。
[0013]
另外,也可以是,本公开中的所述第一太阳齿轮与所述第一小齿轮的第一齿轮对、及所述第二太阳齿轮与所述第二小齿轮的第二齿轮对中的至少任一方齿轮对由斜齿轮形成。
[0014]
另外,也可以构成为,本公开中的所述输入齿轮是内齿轮的第一齿圈,所述输出齿轮是内齿轮的第二齿圈,所述第一齿轮是在与所述第一齿圈啮合的同时在所述第一齿圈的内周部分公转的外齿轮的第一小齿轮(行星齿轮),所述第二齿轮是在与所述第二齿圈啮合的同时在所述第二齿圈的内周部分公转的外齿轮的第二小齿轮(行星齿轮)。
[0015]
另外,也可以是,本公开中的所述输入齿轮是内齿轮的输入齿圈,所述输出齿轮是外齿轮的输出太阳齿轮,所述第一齿轮是在与所述输入齿圈啮合的同时在所述输入齿圈的内周部分公转的外齿轮的第一行星齿轮,所述第二齿轮是在与所述输出太阳齿轮啮合的同时在所述输出太阳齿轮的外周部分公转的内齿轮的第二行星齿轮,所述第一行星齿轮和所述第二行星齿轮一体地形成。
[0016]
另外,也可以构成为,本公开的车辆用差动装置搭载于在车宽方向的左右具有驱动轮的车辆,所述第一驱动轴在所述左右的任一方的所述驱动轮与所述输出齿轮之间传递转矩,所述第二驱动轴在所述左右的另一方的所述驱动轮与所述行星架之间传递转矩,所述第一驱动轴和所述第二驱动轴分别在所述车宽方向的左右对向配置。
[0017]
另外,也可以构成为,本公开的车辆用差动装置搭载于在全长方向的前后具有驱动轮的四轮驱动车辆,所述第一驱动轴在所述前后的任一方的驱动轮与所述输出齿轮之间传递转矩,所述第二驱动轴在所述前后的另一方的驱动轮与所述行星架之间传递转矩,所述第一驱动轴和所述第二驱动轴分别在所述全长方向的前后对向配置。
[0018]
另外,本公开的车辆用差动装置可以还包括控制用致动器,该控制用致动器输出与所述驱动转矩不同的控制转矩。也可以构成为,所述控制用致动器与所述转矩输入构件和所述第二驱动轴以能够传递动力的方式连结,所述差动旋转机构通过对所述第二驱动轴施加(输入)所述控制转矩,来使所述第一齿轮和所述第二齿轮彼此向相反方向旋转,通过控制所述控制转矩,来控制从所述转矩输入构件分别传递给所述第一驱动轴和所述第二驱动轴的所述驱动转矩的分配(分配率)(即,在所述第一驱动轴与所述第二驱动轴之间执行转矩矢量化)。
[0019]
此外,根据本公开,所述控制用致动器可以是控制用马达、励磁工作型电磁制动器或电动制动器。
[0020]
另外,本公开的车辆用差动装置可以还包括控制用减速机构,该控制用减速机构设置在所述控制用致动器与所述差动旋转机构和所述第二驱动轴之间。所述控制用减速机构可以包括:太阳齿轮,经由所述转矩输入构件与所述差动旋转机构连结;行星齿轮,与所述太阳齿轮啮合并且绕所述旋转轴线公转;公转支承行星架,支承所述行星齿轮的公转运动;及输出板,与所述第二驱动轴一体地旋转,将行星齿轮的公转运动转换为第二驱动轴的旋转运动。也可以是,所述控制用转矩从所述控制用致动器输入到所述公转支承行星架,由太阳齿轮和行星齿轮构成的内接式行星齿轮机构的减速比与行星齿轮的齿数相等。
[0021]
另外,本公开的车辆用差动装置可以还包括控制用减速机构,该控制用减速机构设置在所述控制用致动器与所述差动旋转机构和所述第二驱动轴之间。所述控制用减速机构可以包括:第一太阳齿轮,与所述转矩输入构件一体地旋转;第二太阳齿轮,配置在旋转轴线上,并与第二驱动轴一体地旋转;第一小齿轮,与第一太阳齿轮啮合;第二小齿轮,与第二太阳齿轮啮合;及行星架,配置在旋转轴线上,并将第一小齿轮和第二小齿轮以能够自转且能够绕旋转轴线公转的方式进行支承。也可以是,第一太阳齿轮和第二太阳齿轮彼此相对旋转,第一小齿轮和第二小齿轮向自转方向一体地旋转,行星架经由减速行星齿轮机构被输入控制用马达的控制转矩,使由第一太阳齿轮和第一小齿轮构成的齿轮对的齿数比与由第二太阳齿轮和第二小齿轮构成的齿轮对的齿数比互不相同。
[0022]
另外,也可以构成为,本公开的车辆用差动装置还包括:增速行星齿轮机构,具有增速太阳齿轮、增速行星架和增速齿圈;及减速行星齿轮机构,具有减速太阳齿轮、减速行星架和减速齿圈,所述增速行星齿轮机构和所述减速行星齿轮机构均配置在所述旋转轴线上,所述增速太阳齿轮以不能旋转的方式被固定,所述增速行星架与所述转矩输入构件(及所述输入齿轮)一体地旋转,在所述增速行星架旋转时,所述增速齿圈的转速相对于所述增速行星架的转速增大,所述减速齿圈与所述增速齿圈连结而与所述增速齿圈一体地旋转,所述减速行星架的转速相对于所述减速齿圈的转速减少,所述减速太阳齿轮与所述控制用致动器输出所述控制转矩所用的控制转矩输出轴一体地旋转,并且在所述第一驱动轴和所述第二驱动轴向相同方向等速地旋转而与所述转矩输入构件一起连带旋转的情况下,所述减速太阳齿轮与所述转矩输入构件相对旋转(即,不连带旋转)。
[0023]
另外,也可以构成为,本公开的车辆用差动装置与作为所述动力源而输出所述驱动转矩的驱动用马达一起搭载于在车宽方向的左右具有驱动轮的车辆,所述第一驱动轴和所述第二驱动轴分别在所述车宽方向的左右对向配置,所述车辆用差动装置还包括:第一减速机构,配置在所述第一驱动轴与连结有所述左右的任一方的所述驱动轮的第一车轴之间,将所述第一驱动轴的转矩放大并传递给所述第一车轴;及第二减速机构,配置在所述第二驱动轴与连结有所述左右的另一方的所述驱动轮的第二车轴之间,将所述第二驱动轴的转矩放大并传递给所述第二车轴,所述差动旋转机构、所述驱动用马达、所述第一减速机构及所述第二减速机构均配置在所述旋转轴线上。
[0024]
并且,也可以构成为,本公开中的所述驱动用马达具有中空构造的转子,所述差动旋转机构配置于所述转子的中空部分(即,内置于驱动用马达)。
[0025]
本公开的车辆用差动装置主要由输入齿轮和输出齿轮这两个齿轮、分别与这两个齿轮啮合的第一齿轮和第二齿轮这另外两个齿轮、及将该第一齿轮和第二齿轮以能够自转且能够绕旋转轴线公转的方式进行支承行星架构成。因此,本公开的车辆用差动装置的主要的齿轮传动部分共由四种齿轮和行星架构成。第一齿轮和第二齿轮分别与输入齿轮和输出齿轮啮合并且绕旋转轴线公转。即,第一齿轮和第二齿轮均为行星齿轮机构的所谓的行星齿轮。总之,本公开的车辆用差动装置由共用行星架的、实质上为两组的行星齿轮机构构成。例如,由不使用齿圈的两组行星齿轮机构、或不使用太阳齿轮的两组行星齿轮机构、或不使用小齿轮的两组行星齿轮机构构成。与由太阳齿轮、齿圈和小齿轮构成的通常的行星齿轮机构相比,结构简单。
[0026]
而且,在本公开的车辆用差动装置中,使输入齿轮与第一齿轮之间的齿数比(为了便于说明而称为“第一齿数比”)和输出齿轮与第二齿轮之间的齿数比(为了便于说明而称为“第二齿数比”)互不相同。因此,在与转矩输入构件连结的输入齿轮的转速和与第一驱动轴连结的输出齿轮的转速相等的状态下,在输入齿轮与第一齿轮之间、及输出齿轮与第二齿轮之间分别传递转矩时,这些输入齿轮侧的齿轮的啮合与输出齿轮侧的齿轮的啮合相互干涉。其结果是,差动旋转机构实质上成为卡合状态,并成为一体而旋转。因此,输入齿轮、输出齿轮及行星架不进行差动旋转而一体地旋转。其结果是,第一驱动轴和第二驱动轴不进行差动旋转而相互等速地旋转。与此相对,在输入齿轮的转速与输出齿轮的转速之间存在转速差的状态下,如上所述的由输入齿轮侧的齿轮与输出齿轮侧的齿轮的干涉引起的卡合状态被解除,在差动旋转机构中,分别根据“第一齿数比”和“第二齿数比”传递转矩。因此,输入齿轮和输出齿轮分别旋转,以使输出齿轮相对于输入齿轮反转。而且,输出齿轮和行星架彼此向相反方向旋转。其结果是,第一驱动轴和第二驱动轴分别旋转,以使一个驱动轴相对于另一个驱动轴反转。即,第一驱动轴和第二驱动轴一边差动旋转,一边彼此向相反的旋转方向相对旋转。因此,从规定的动力源输入到转矩输入构件的驱动转矩被分配给第一驱动轴和第二驱动轴。与此同时,第一驱动轴与第二驱动轴之间的转速差被吸收。因此,根据本公开,能够使用如上所述的两组简单的行星齿轮机构(差动旋转机构)来构成紧凑且简单的车辆用差动装置。
[0027]
另外,在本公开的车辆用差动装置中,也可以是,当设第一齿轮的齿数为z1、第二齿轮的齿数为z2、输入齿轮的齿数为z3、输出齿轮的齿数为z4时,将第一齿轮的齿数z1、第二齿轮的齿数z2、输入齿轮的齿数z3及输出齿轮的齿数z4分别设定成使如下关系成立:
[0028]
1/(1-z3/z1×
z2/z4)=-1。
[0029]
上述与各齿轮的齿数相关的关系式中的“1/(1-z3/z1×
z2/z4)”是输入齿轮的转速相对于行星架的转速的比例的倒数,并且是将旋转方向纳入考虑的差动旋转机构的减速比(在对减速比赋予负号的情况下,意味着行星架的旋转方向与输入齿轮的旋转方向相反)。因此,由于差动旋转机构的减速比为
“‑
1”,因此在第一驱动轴和第二驱动轴差动旋转时,第一驱动轴和第二驱动轴彼此向相反方向以相等的转速相对旋转。因此,根据本公开的车辆用差动装置,能够在允许第一驱动轴与第二驱动轴之间的差动旋转的同时,将输入到转矩输入构件的驱动转矩等分配地传递给第一驱动轴和第二驱动轴。
[0030]
另外,在本公开的车辆用差动装置中,也可以是,当设第一齿轮的齿数为z1、第二齿轮的齿数为z2、输入齿轮的齿数为z3、输出齿轮的齿数为z4时,将第一齿轮的齿数z1、第二齿轮的齿数z2、输入齿轮的齿数z3及输出齿轮的齿数z4分别设定成使如下关系成立:
[0031]-2<1/(1-z3/z1×
z2/z4)<-1。
[0032]
在现有的使用普通的行星齿轮机构构成的差动旋转机构的情况下,能够设定的减速比的大小(绝对值)最小为大致“3”左右。与此相对,根据本公开的车辆用差动装置,通过适当地调整并设定第一齿轮的齿数z1、第二齿轮的齿数z2、输入齿轮的齿数z3及输出齿轮的齿数z4,即使在“1”至“2”左右的范围内也能够设定减速比。因此,能够构成转矩分配比的设定自由度较高的车辆用差动装置。
[0033]
另外,在本公开的车辆用差动装置中,也可以是,输入齿轮和输出齿轮分别是外齿轮的太阳齿轮(第一太阳齿轮和第二太阳齿轮),第一齿轮和第二齿轮分别是在输入齿轮和输出齿轮的外周部分公转的行星齿轮(第一小齿轮和第二小齿轮),构成了两组行星齿轮机构。并且,由这两组行星齿轮机构构成差动旋转机构。该情况下的两组行星齿轮机构均是不使用齿圈的简单的结构。因此,根据本公开,能够使用两组简单的行星齿轮机构(差动旋转机构)来构成紧凑且简单的车辆用差动装置。
[0034]
另外,在本公开的车辆用差动装置中,如上所述,在将输入齿轮和输出齿轮分别由外齿轮的第一太阳齿轮和第二太阳齿轮构成的情况下,可以将第一太阳齿轮(输入齿轮)的外径设定得比第二太阳齿轮(输出齿轮)的外径大。因此,能够增大作为输入元件而需要更大的强度的第一太阳齿轮的直径。其结果是,能够确保第一太阳齿轮的强度。因此,能够实现差动旋转机构的小型化设计,进而能够实现本公开的车辆用差动装置的小型化。
[0035]
另外,在本公开的车辆用差动装置中,如上所述,在将输入齿轮和输出齿轮分别由外齿轮的第一太阳齿轮和第二太阳齿轮构成,将第一齿轮和第二齿轮分别由外齿轮的第一小齿轮和第二小齿轮构成的情况下,第一太阳齿轮与第一小齿轮的齿轮对、及第二太阳齿轮与第二小齿轮的齿轮对中的至少任一方的齿轮对可以由斜齿轮形成。通过使用斜齿轮,在对齿轮对施加转矩的情况下,产生与该转矩相应的推力(旋转轴线方向的力)。因此,能够利用受到该推力而在齿轮的端面产生的摩擦滑动阻力来进行车辆用差动装置的差动限制。因此,能够使本公开的车辆用差动装置具有所谓的转矩感应式的差动限制功能。
[0036]
另外,在本公开的车辆用差动装置中,也可以是,输入齿轮和输出齿轮分别是内齿轮的齿圈,第一齿轮和第二齿轮分别是在输入齿轮和输出齿轮的内周部分公转的行星齿轮(小齿轮),构成了两组行星齿轮机构。并且,由这两组行星齿轮机构构成差动旋转机构。该情况下的两组行星齿轮机构均是不使用太阳齿轮的简单的结构。因此,根据本公开,能够使
用两组简单的行星齿轮机构(差动旋转机构)来构成紧凑且简单的车辆用差动装置。
[0037]
另外,在本公开的车辆用差动装置中,也可以是,输入齿轮是内齿轮的齿圈,输出齿轮是外齿轮的太阳齿轮,第一齿轮是在输入齿轮的内周部分公转的行星齿轮,第二齿轮是在输出齿轮的外周部分公转的行星齿轮,构成了两组内接式行星齿轮机构。并且,由这两组内接式行星齿轮机构构成差动旋转机构。内接式行星齿轮机构是不使用小齿轮的简单的结构。因此,根据本公开,能够使用两组简单的内接式行星齿轮机构(差动旋转机构)来构成紧凑且简单的车辆用差动装置。
[0038]
另外,本公开的车辆用差动装置中,第一驱动轴和第二驱动轴也可以在车辆的车宽方向的左右排列配置。因此,通过将第一驱动轴和第二驱动轴分别设为向驱动轮传递转矩的车轴,或者通过将第一驱动轴和第二驱动轴分别与左右驱动轮的车轴连结,能够构成针对车辆的左右驱动轮的差动装置。因此,根据本公开的车辆用差动装置,能够紧凑且以简单的结构构成容易搭载于车辆的、针对左右驱动轮的差动装置。
[0039]
另外,本公开的车辆用差动装置中,第一驱动轴和第二驱动轴也可以在车辆的全长方向(或者前后方向)的前后排列配置。因此,通过将第一驱动轴和第二驱动轴分别设为向驱动轮传递转矩的推进轴,能够构成四轮驱动车辆的所谓的中央差速器。因此,根据本公开的车辆用差动装置,能够紧凑且以简单的结构构成容易搭载于四轮驱动车辆的、针对前后驱动轮的中央差速器。
[0040]
另外,本公开的车辆用差动装置也可以与控制用致动器组合而构成转矩矢量化装置。通过将控制用致动器输出的控制转矩传递给转矩输入构件,能够将该控制转矩分配并传递给输出齿轮即第一驱动轴和行星架即第二驱动轴。传递到输出齿轮和行星架的控制转矩使该输出齿轮和行星架彼此反转。因此,通过对控制用致动器的控制转矩进行控制,能够积极地控制从动力源向第一驱动轴和第二驱动轴传递的驱动转矩的分配或分配率。即,例如能够执行对左右驱动轮或前后驱动轮的转矩矢量化。因此,根据本公开的车辆用差动装置,能够构成紧凑且简单的转矩矢量化装置。
[0041]
另外,本公开的车辆用差动装置在如上述那样与控制用致动器组合而构成转矩矢量化装置的情况下,也可以设置用于抑制控制用致动器的所谓的连带旋转的增速行星齿轮机构和减速行星齿轮机构。在本公开的车辆用差动装置中,在输入齿轮和输出齿轮向相同方向等速地旋转的情况下,除了该输入齿轮和输出齿轮之外,第一齿轮、第二齿轮和行星架也一体地旋转。即,差动旋转机构一体地旋转。与此相伴,增速行星齿轮机构的增速行星架和减速行星齿轮机构的减速行星架向相同方向等速地旋转。在该情况下,增速行星齿轮机构作为在停止了增速太阳齿轮的旋转的状态下使增速齿圈的转速相对于增速行星架的转速增大的增速机构发挥功能。另一方面,减速行星齿轮机构作为使减速行星架的转速相对于减速齿圈的转速减少的减速机构发挥功能。增速行星架的转速与减速行星架的转速彼此相等。另外,由于增速齿圈与减速齿圈连结,因此该增速齿圈的转速与减速齿圈的转速也彼此相等。因此,增速行星齿轮机构的增速比的绝对值与减速行星齿轮机构的减速比的绝对值相等,在该情况下,由于增速行星齿轮机构的增速太阳齿轮的转速为“0”,所以在减速行星齿轮机构中,根据减速行星齿轮机构的齿数比,减速太阳齿轮的转速相对于减速齿圈或减速行星架的转速减少到“0”或“0”附近的转速。在该情况下,通过将增速行星齿轮机构的齿数比与减速行星齿轮机构的齿数比设定为彼此相等,能够使减速太阳齿轮的转速为0。因
此,在如上述那样输入齿轮和输出齿轮向相同方向等速地旋转,差动旋转机构一体地连带旋转的情况下,能够使与减速太阳齿轮连结的控制转矩输出轴的转速为0或大致为0。即,能够抑制控制用致动器的连带旋转。因此,根据本公开的车辆用差动装置,能够抑制控制用致动器的连带旋转而提高车辆用差动装置的动力传递效率。进而,能够使搭载控制用致动器和本公开的车辆用差动装置的车辆的能量效率提高。
[0042]
另外,本公开的车辆用差动装置也可以与驱动用马达和第一减速机构及第二减速机构组合而构成作为车辆的驱动力源的动力单元。在本方式中,车辆用差动装置、驱动用马达、第一减速机构及第二减速机构全部配置在同一旋转轴线上。因此,构成组装有本公开的车辆用差动装置的单轴构造的动力单元。此时,车辆用差动装置配置于各减速机构的上游侧。即,车辆用差动装置配置在驱动用马达与第一减速机构及第二减速机构之间。其结果是,由第一减速机构和第二减速机构放大之前的驱动转矩作用于车辆用差动装置。因此,能够抑制车辆用差动装置的大型化。因此,根据本公开的车辆用差动装置,能够构成紧凑且简单的单轴构造的动力单元。
[0043]
并且,在本公开的车辆用差动装置中,如上所述,在与驱动用马达和第一减速机构及第二减速机构一起构成单轴构造的动力单元的情况下,也可以使用具有中空构造的转子的驱动用马达。并且,在该转子的中空部分配置差动旋转机构。即,差动旋转机构内置于驱动用马达的转子。因此,与将驱动用马达和差动旋转机构在旋转轴线方向上串联配置的结构相比,能够缩短动力单元的旋转轴线方向的全长。因此,根据本公开的车辆用差动装置,能够构成缩短了旋转轴线方向的全长的、更加紧凑且简单的动力单元。
附图说明
[0044]
下面将参考附图描述本发明的示例性实施例的特征、优点以及技术和工业重要性,附图中相同的附图标记表示相同的元件,并且其中:
[0045]
图1是用于说明本公开的车辆用差动装置的一例的图,并且是表示在使用由太阳齿轮和小齿轮构成的两组行星齿轮机构来构成“差动旋转机构”的类型的车辆用差动装置中构成了“开放式差速器”的实施方式的图。
[0046]
图2是用于说明本公开的车辆用差动装置的另一例的图,并且是表示对图1所示的类型的车辆用差动装置组合“控制用致动器”而构成了具有转矩矢量化功能的“左右轮的差速机构”的实施方式的图。
[0047]
图3是用于说明本公开的车辆用差动装置的另一例的图,并且是表示对图1所示的类型的车辆用差动装置组合“驱动用马达”和“制动机构”而构成了具有转矩矢量化功能的“动力单元”的实施方式的图。
[0048]
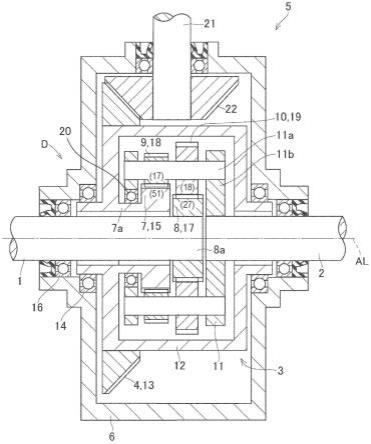
图4是用于说明本公开的车辆用差动装置的另一例的图,并且是表示对图1所示的类型的车辆用差动装置组合“驱动用马达”和“控制用致动器”而构成了具有转矩矢量化功能的“单轴构造的动力单元(驱动用马达一体的中央差速器)”的实施方式的图。
[0049]
图5是表示在图4所示的“单轴构造的动力单元”设有“电磁制动器”作为“控制用致动器”的实施方式的图。
[0050]
图6是表示在图4所示的“单轴构造的动力单元”设有“电动制动器”作为“控制用致动器”的实施方式的图。
[0051]
图7是用于说明本公开的车辆用差动装置的另一例的图,并且是表示对图1所示的类型的车辆用差动装置组合“驱动用马达”和“减速机构”而构成了“单轴构造的动力单元”的实施方式的图。
[0052]
图8是用于说明本公开的车辆用差动装置的另一例的图,并且是表示对图1所示的类型的车辆用差动装置组合“中空转子的驱动用马达”和“减速机构”而构成了“单轴构造的动力单元”的实施方式的图。
[0053]
图9是用于说明本公开的车辆用差动装置的另一例的图,并且是表示从图1所示的类型的车辆用差动装置省略“差速器箱”而构成了简化的“开放式差速器”的实施方式的图。
[0054]
图10是用于说明本公开的车辆用差动装置的另一例的图,并且是表示在使用由齿圈和小齿轮构成的两组行星齿轮机构来构成“差动旋转机构”的类型的车辆用差动装置中构成了“开放式差速器”的实施方式的图。
[0055]
图11是用于说明本公开的车辆用差动装置的另一例的图,并且是表示在使用两组内接式行星齿轮机构来构成“差动旋转机构”的类型的车辆用差动装置中构成了“开放式差速器”的实施方式的图。
[0056]
图12是用于说明本公开的车辆用差动装置的另一例的图,并且是表示由图11所示的类型的车辆用差动装置构成了“中央差速器”的实施方式的图。
[0057]
图13是用于说明本公开的车辆用差动装置的另一例的图,并且是表示对图11所示的类型的车辆用差动装置组合“控制用致动器”而构成了具有转矩矢量化功能的“左右轮的差动机构”的实施方式的图。
具体实施方式
[0058]
参照附图对本公开的实施方式进行说明。另外,以下所示的实施方式只不过是将本公开具体化的情况的一例,并不限定本公开。
[0059]
图1示出了应用了本公开的车辆用差动装置的一例。本公开的实施方式中的差动装置d是构成为使配置在同轴上的两根驱动轴彼此反转而能够进行差动旋转的传动装置,具备第一驱动轴1和第二驱动轴2这两根主旋转轴、差动旋转机构3及转矩输入构件4。图1所示的差动装置d搭载于车辆(未图示),构成了针对车辆的左右驱动轮(未图示)的差速机构5(所谓的开放式差速器)。
[0060]
第一驱动轴1和第二驱动轴2彼此在同轴上对向配置,并彼此相对旋转。具体而言,第一驱动轴1和第二驱动轴2均配置在旋转轴线al上。第一驱动轴1和第二驱动轴2分别经由规定的轴承以能够旋转的方式支承于差动装置d的壳体6。另外,壳体6兼作差速机构5的壳体。或者,与差速机构5的壳体一体化。在该图1所示的实施方式中,第一驱动轴1的一端(图1的右侧的端部)以能够旋转的方式支承于壳体6。第一驱动轴1在突出侧的前端(图1的左侧的端部)连结有车辆的左右任一方的驱动轮(未图示)。同样地,第二驱动轴2的一端(图1的左侧的端部)以能够旋转的方式支承于壳体6。第二驱动轴2在突出侧的前端(图1的右侧的端部)连结有另一方的驱动轮(未图示)。
[0061]
差动旋转机构3配置在旋转轴线al上。差动旋转机构3使第一驱动轴1与第二驱动轴2之间能够差动旋转。作为主要的构成元件,差动旋转机构3由输入齿轮7、输出齿轮8、第一齿轮9、第二齿轮10及行星架11构成。
[0062]
输入齿轮7和输出齿轮8均在同一旋转轴线al上串联(即,在旋转轴线al方向上排列)配置。在图1所示的实施方式中,从图1的左侧起,按照输入齿轮7、输出齿轮8的顺序排列。输入齿轮7和输出齿轮8能够相对旋转。在图1所示的实施方式中,输入齿轮7的旋转轴7a为中空轴,在旋转轴7a的中空部分配置有输出齿轮8的旋转轴8a和第一驱动轴1。如后所述,旋转轴8a和第一驱动轴1一体地旋转。旋转轴7a与旋转轴8a和第一驱动轴1能够相对旋转。因此,输入齿轮7和输出齿轮8彼此相对旋转。
[0063]
输入齿轮7的旋转轴7a经由差速器箱12与差速器齿圈13连结。差速器箱12是覆盖差动旋转机构3的壳体状的旋转构件。差速器箱12配置在旋转轴线al上。如后所述,差速器齿圈13是相当于本公开的实施方式中的转矩输入构件4的旋转构件。差速器齿圈13形成于差速器箱12的外周部分。差速器箱12和差速器齿圈13一体地旋转。因此,输入齿轮7和差速器齿圈13即转矩输入构件4一体地旋转。输入齿轮7、差速器箱12和差速器齿圈13经由轴承14支承于壳体6。在图1所示的实施方式中,输入齿轮7是“外齿轮”的第一太阳齿轮15,与第一齿轮9(即后述的第一小齿轮18)啮合。
[0064]
输出齿轮8的旋转轴8a与第一驱动轴1连结。或者,旋转轴8a与第一驱动轴1一体地形成。旋转轴8a和第一驱动轴1一体地旋转。因此,输出齿轮8和第一驱动轴1一体地旋转。输出齿轮8和第一驱动轴1经由轴承16支承于壳体6。在图1所示的实施方式中,输出齿轮8是“外齿轮”的第二太阳齿轮17,与第二齿轮10(即后述的第二小齿轮19)啮合。
[0065]
第一齿轮9和第二齿轮10相互在同轴上串联(即,在旋转轴线al方向上排列)配置。在图1所示的实施方式中,从图1的左侧起,按照第一齿轮9、第二齿轮10的顺序排列。第一齿轮9和第二齿轮10一体地旋转。如后所述,第一齿轮9和第二齿轮10由行星架11以能够自转且能够绕旋转轴线al公转的方式支承。在图1所示的实施方式中,第一齿轮9是小直径“外齿轮”的第一小齿轮18,与输入齿轮7即第一太阳齿轮15啮合。另外,第二齿轮10是小直径“外齿轮”的第二小齿轮19,与输出齿轮8即第二太阳齿轮17啮合。
[0066]
行星架11配置在旋转轴线al上。行星架11经由轴承20支承于输入齿轮7(第一太阳齿轮15)的旋转轴7a。行星架11和旋转轴7a彼此能够相对旋转。因此,行星架11与输入齿轮7(第一太阳齿轮15)和输出齿轮8(第二太阳齿轮17)彼此相对旋转。行星架11将第一小齿轮18和第二小齿轮19以能够自转且能够绕旋转轴线al公转的方式进行支承。具体而言,在图1所示的实施方式中,行星架11具有小齿轮轴11a和板部11b。在小齿轮轴11a一体地安装有第一小齿轮18和第二小齿轮19。小齿轮轴11a、第一小齿轮18和第二小齿轮19一体地旋转。板部11b将小齿轮轴11a以能够旋转的方式进行支承。板部11b与第二驱动轴2连结。板部11b和第二驱动轴2一体地旋转。因此,行星架11和第二驱动轴2一体地旋转。
[0067]
另外,由行星架11支承的第一小齿轮18、第二小齿轮19、小齿轮轴11a的组(为了便于说明而称为“行星组”)在“行星组”的公转轨道(圆轨道)的圆周上设置有多组。在图1中,示出了两组“行星组”在公转轨道的径向上对向配置的结构。
[0068]
转矩输入构件4被从规定的动力源输入驱动转矩。在图1所示的实施方式中,作为转矩输入构件4设有差速器齿圈13。另外,动力源例如是发动机、驱动用马达、或制动装置等,产生使车辆加速的转矩或使车辆制动的转矩等正负的驱动转矩。
[0069]
在图1所示的实施方式中,差速器齿圈13是大直径的锥齿轮,与设置于车辆(未图示)的传动轴21的前端(图1所示的传动轴21的下侧的端部)的驱动小齿轮22啮合。驱动小齿
轮22是与差速器齿圈13相比直径较小且齿数较少的锥齿轮。因此,由驱动小齿轮22和差速器齿圈13构成了车辆的最终减速装置(末端传动齿轮)。传动轴21的另一个端部(未图示)与车辆的动力源连结。即,差动旋转机构3经由差速器齿圈13和传动轴21与动力源连结。
[0070]
如上所述,本公开的实施方式中的差动装置d由第一驱动轴1、第二驱动轴2、差动旋转机构3及转矩输入构件4构成。在图1所示的实施方式中,差动装置d构成了针对车辆的左右驱动轮的差速机构5(开放式差速器)。作为差动装置d的主要构成元件的差动旋转机构3由输入齿轮7(第一太阳齿轮15)、输出齿轮8(第二太阳齿轮17)、第一齿轮9(第一小齿轮18)及第二齿轮10(第二小齿轮19)共四种齿轮和行星架11构成。第一齿轮9和第二齿轮10分别与输入齿轮7和输出齿轮8啮合并且绕旋转轴线al公转。即,第一齿轮9和第二齿轮10均为行星齿轮机构的所谓的行星齿轮。总之,本公开的实施方式中的差动装置d由共用了行星架11的实质上为两组的行星齿轮机构、或组合了两组行星齿轮机构的复合行星齿轮机构构成。在图1所示的实施方式中,差动装置d由不使用“齿圈”的两组行星齿轮机构构成。与由“太阳齿轮”、“齿圈”及“小齿轮”这三个旋转元件构成的通常的行星齿轮机构相比,结构简单。
[0071]
本公开的实施方式的差动装置d中,在第一驱动轴1和第二驱动轴2向相同方向等速(相同转速)地旋转的情况下,第一驱动轴1和第二驱动轴2与差动旋转机构3一体地旋转。在该情况下,驱动转矩被等分配地传递给第一驱动轴1和第二驱动轴2。与此相对,在第一驱动轴1的转速与第二驱动轴2的转速不同的情况下,第一驱动轴1和第二驱动轴2彼此向相反方向相对旋转,进行差动旋转。
[0072]
因此,在差动装置d中,使输入齿轮7与第一齿轮9之间的齿数比和输出齿轮8与第二齿轮10之间的齿数比分别互不相同。另外,在本公开的实施方式中,设第一齿轮9的齿数为z1、第二齿轮10的齿数为z2、输入齿轮7的齿数为z3、输出齿轮8的齿数为z4。另外,将第一齿轮9的齿数z1相对于输入齿轮7的齿数z3的比率设为第一齿轮9与输入齿轮7之间的齿数比(第一齿数比)u1,将第二齿轮10的齿数z2相对于输出齿轮8的齿数z4的比率设为第二齿轮10与输出齿轮8之间的齿数比(第二齿数比)u2。
[0073]
例如,如图1中括号内的数值所示,差动装置d构成为第一齿轮9(第一小齿轮18)的齿数z1为“17”、第二齿轮10(第二小齿轮19)的齿数z2为“18”、输入齿轮7(第一太阳齿轮15)的齿数z3为“51”、输出齿轮8(第二太阳齿轮17)的齿数z4为“27”。在该情况下,第一齿数比u1和第二齿数比u2分别为:
[0074]
u1=z1/z3=17/51≈0.333,
[0075]
u2=z2/z4=18/27≈0.666。
[0076]
第一齿数比u1和第二齿数比u2彼此不一致而不同。
[0077]
在如上述那样构成的差动装置d中,输入到转矩输入构件4(差速器齿圈13)的驱动转矩被分配并传递给输入齿轮7(第一太阳齿轮15)和输出齿轮8(第二太阳齿轮17)。此时,在第一驱动轴1的转速与第二驱动轴2的转速相等的情况下,输出齿轮8(第二太阳齿轮17)和行星架11一体地旋转。
[0078]
具体而言,当向输入齿轮7(第一太阳齿轮15)输入了驱动转矩时,第一齿轮9(第一小齿轮18)和第二齿轮10(第二小齿轮19)旋转。此时,由于第一齿轮9(第一小齿轮18)与输入齿轮7(第一太阳齿轮15)之间的第一齿数比u1小于第二齿轮10(第二小齿轮19)与输出齿
轮8(第二太阳齿轮17)之间的第二齿数比u2,因此输入齿轮7(第一太阳齿轮15)要比输出齿轮8(第二太阳齿轮17)旋转得慢。相反地,输出齿轮8(第二太阳齿轮17)要比输入齿轮7(第一太阳齿轮15)旋转得快。因此,输入齿轮7(第一太阳齿轮15)和输出齿轮8(第二太阳齿轮17)要相对地彼此向相反方向旋转。即,向第一齿轮9(第一小齿轮18)与输入齿轮7(第一太阳齿轮15)的啮合部、及第二齿轮10(第二小齿轮19)与输出齿轮8(第二太阳齿轮17)的啮合部作用相互反向的转矩。但是,实际上,第一齿轮9(第一小齿轮18)和第二齿轮10(第二小齿轮19)一体地旋转。因此,上述的各啮合部相互干涉。其结果是,差动装置d的差动旋转机构3整体实质上成为卡合状态,一体地旋转。即,输入齿轮7(第一太阳齿轮15)、输出齿轮8(第二太阳齿轮17)及行星架11全部一体地旋转。因此,第一驱动轴1和第二驱动轴2不进行差动旋转而一体地旋转。
[0079]
与此相对,在第一驱动轴1的转速与第二驱动轴2的转速之间存在转速差的情况下、即在输出齿轮8(第二太阳齿轮17)与行星架11进行差动旋转的情况下,如上所述的由各啮合部的干涉引起的差动装置d的实质的卡合状态被解除。因此,在从转矩输入构件4(差速器齿圈13)到输出齿轮8(第二太阳齿轮17)的动力传递路径、及从转矩输入构件4(差速器齿圈13)到行星架11的动力传递路径中,使输出齿轮8(第二太阳齿轮17)和行星架11差动旋转,并且分别传递驱动转矩。在该情况下,输出齿轮8(第二太阳齿轮17)和行星架11根据构成如上所述的差动旋转机构3的复合行星齿轮机构的齿数比(减速比)进行差动旋转。
[0080]
并且,本公开的实施方式的差动装置d中,关于第一齿轮9(第一小齿轮18)的齿数z1、第二齿轮10(第二小齿轮19)的齿数z2、输入齿轮7(第一太阳齿轮15)的齿数z3及输出齿轮8(第二太阳齿轮17)的齿数z4,将各齿数z1、z2、z3、z4设定成使如下关系成立:
[0081]
1/(1-z3/z1×
z2/z4)=-1。
[0082]
与上述的例子同样地,在各齿数z1、z2、z3、z4为图1的括号内所示的数值的情况下,1/(1-z3/z1×
z2/z4)=1/{1-(51/17)
×
(18/27)=-1,上述关系式成立。
[0083]
上述关系式中的“1/(1-z3/z1×
z2/z4)”是输入齿轮7(第一太阳齿轮15)的转速相对于行星架11的转速的比例的倒数,并且是附加了旋转方向的差动旋转机构3(复合行星齿轮机构)的减速比(在对减速比赋予了负号的情况下,意味着行星架11的旋转方向与输入齿轮7(第一太阳齿轮15)的旋转方向相反)。因此,由于差动旋转机构3的减速比为
“‑
1”,因此在第一驱动轴1和第二驱动轴2差动旋转时,行星架11相对于输入齿轮7(第一太阳齿轮15)和输出齿轮8(第二太阳齿轮17)向相反的旋转方向以相等的转速旋转。即,第一驱动轴1和第二驱动轴2彼此向相反的旋转方向以相等的转速相对旋转。因此,根据本公开的实施方式中的差动装置d,能够在允许第一驱动轴1与第二驱动轴2之间的差动旋转的同时,将输入到转矩输入构件4(差速器齿圈13)的驱动转矩等分配地传递给第一驱动轴1和第二驱动轴2。
[0084]
这样,本公开的实施方式中的差动装置d实质上由两组行星齿轮机构、或复合行星齿轮机构构成主要部分,将从动力源输入的驱动转矩分配并传递给第一驱动轴1和第二驱动轴2。与此同时,允许第一驱动轴1与第二驱动轴2的差动旋转,并吸收该第一驱动轴1与第二驱动轴2之间的转速差。因此,根据本公开的实施方式中的差动装置d,能够构成紧凑且简单的差速机构5(开放式差速器)。
[0085]
另外,如图1所示,本公开的实施方式的差动装置d中,在将输入齿轮7和输出齿轮8分别由“外齿轮”的第一太阳齿轮15和第二太阳齿轮17构成的情况下,该第一太阳齿轮15和
第二太阳齿轮17的外径被设定为第一太阳齿轮15的外径比第二太阳齿轮17的外径大。因此,能够增大作为输入元件而需要更大的强度的第一太阳齿轮15的直径。其结果是,能够确保第一太阳齿轮15的强度。因此,能够实现差动旋转机构3的小型化设计,进而能够实现本实施方式中的差动装置d的小型化。
[0086]
另外,在本公开的实施方式的差动装置d中,第一太阳齿轮15与第一小齿轮18的齿轮对、及第二太阳齿轮17与第二小齿轮19的齿轮对中的至少任一方的齿轮对由斜齿轮形成。通过使用斜齿轮,在对齿轮对施加转矩的情况下,产生与该转矩相应的推力(旋转轴线方向的力)。因此,能够利用受到该推力而在齿轮的端面产生的摩擦滑动阻力来进行差动装置d的差动限制。因此,能够使本公开的实施方式中的差动装置d具有所谓的转矩感应式的差动限制功能。
[0087]
另外,本公开的实施方式的差动装置d中,关于第一齿轮9(第一小齿轮18)的齿数z1、第二齿轮10(第二小齿轮19)的齿数z2、输入齿轮7(第一太阳齿轮15)的齿数z3及输出齿轮8(第二太阳齿轮17)的齿数z4,也可以将各齿数z1、z2、z3、z4设定成使如下关系成立:
[0088]-2<1/(1-z3/z1×
z2/z4)<-1。
[0089]
例如,在设第一齿轮9(第一小齿轮18)的齿数z1为“17”、第二齿轮10(第二小齿轮19)的齿数z2为“15”、输入齿轮7(第一太阳齿轮15)的齿数z3为“51”、输出齿轮8(第二太阳齿轮17)的齿数z4为“18”的情况下,1/(1-z3/z1×
z2/z4)=1/{1-(51/17)
×
(15/18)=-1.5,上述的关系式成立。在现有的使用普通的行星齿轮机构构成的差动旋转机构的情况下,能够设定的减速比的大小(绝对值)最小为大致“3”左右。与此相对,根据本公开的实施方式中的差动装置d,如上述具体例那样,通过适当地调整并设定第一齿轮的齿数z1、第二齿轮的齿数z2、输入齿轮的齿数z3及输出齿轮的齿数z4,即使在“1”至“2”左右的范围内也能够设定减速比。因此,能够构成转矩分配比的设定自由度较高的差动装置d。
[0090]
图2至图13示出了应用了本公开的差动装置d的其他实施方式。另外,在以下图示说明的差动装置d中,对于结构或功能与上述图1或已提到的附图所示的差动装置d相同的构件或部件等,标注与在图1或已提到的附图中所使用的参照标号相同的参照标号。
[0091]
本公开的实施方式中的差动装置d通过组合产生用于使如上所述的差动旋转机构3差动旋转的控制转矩的规定的致动器(或者动力源),能够构成具有转矩矢量化功能的差速机构(即,转矩矢量化装置)。图2所示的差动装置d对上述图1所示的差动装置d组合“控制用致动器”,构成了具有转矩矢量化功能的车辆用的差速机构30。即,差动装置d也可以具备“控制用致动器”。
[0092]
具体而言,在图2所示的实施方式中,作为“控制用致动器”设有控制用马达31。控制用马达31是与上述的产生驱动转矩的动力源不同的电动马达,产生用于控制第一驱动轴1与第二驱动轴2之间的差动状态的控制转矩。控制用马达31例如由永磁式同步马达或感应马达等构成。控制用马达31配置在旋转轴线al上。即,控制用马达31、第一驱动轴1、第二驱动轴2和差动旋转机构3彼此配置在同轴上。
[0093]
控制用马达31具有转子31a的旋转轴、即输出上述控制转矩的控制转矩输出轴31b。控制转矩输出轴31b相对于差动旋转机构3以能够传递动力的方式连结。在图2所示的差动装置d中,在控制用马达31与差动旋转机构3和第二驱动轴2之间设有控制用减速机构32。即,控制用马达31与差动旋转机构3和第二驱动轴2经由控制用减速机构32连结。
[0094]
控制用减速机构32配置在旋转轴线al上。控制用减速机构32以内接式行星齿轮机构为基础而构成。具体而言,控制用减速机构32具有太阳齿轮32a、行星齿轮32b、公转支承行星架32c及输出板32d。
[0095]
太阳齿轮32a是“外齿轮”,作为控制用减速机构32(内接式行星齿轮机构)的反作用力元件,经由转矩输入构件4与差动旋转机构3连结。在图2所示的实施方式中,太阳齿轮32a与差动旋转机构3的输入齿轮7(第一太阳齿轮15)经由差速器箱12和差速器齿圈13(转矩输入构件4)连结。太阳齿轮32a、差速器齿圈13(转矩输入构件4)和输入齿轮7(第一太阳齿轮15)一体地旋转。
[0096]
行星齿轮32b是“内齿轮”的齿圈,与太阳齿轮32a啮合,并且绕太阳齿轮32a、即绕旋转轴线al公转。行星齿轮32b作为控制用减速机构32(内接式行星齿轮机构)的输出元件,向后述的输出板32d传递转矩。
[0097]
公转支承行星架32c具有与行星齿轮32b的公转轨道相应地相对于旋转轴线al偏心的偏心凸缘部32e。公转支承行星架32c在偏心凸缘部32e经由轴承33支承行星齿轮32b。由此,公转支承行星架32c支承行星齿轮32b的公转运动。与此同时,公转支承行星架32c作为控制用减速机构32(内接式行星齿轮机构)的输入元件,与控制用马达31的控制转矩输出轴31b连结。公转支承行星架32c和控制转矩输出轴31b一体地旋转,从控制用马达31向公转支承行星架32c输入控制转矩。
[0098]
输出板32d与第二驱动轴2连接。输出板32d和第二驱动轴2一体地旋转。输出板32d使用安装于行星齿轮32b的反作用力销32f和形成于输出板32d的反作用力孔32g,将行星齿轮32b的公转运动转换为第二驱动轴2的旋转运动。并且,输出板32d在行星齿轮32b与第二驱动轴2之间传递转矩。
[0099]
在图2所示的实施方式中,控制用减速机构32的太阳齿轮32a和行星齿轮32b均由摆线齿形的齿轮(即,“摆线齿轮”)形成。并且,如图2中括号内的数值所示,控制用减速机构32构成为太阳齿轮32a的齿数为“30”、行星齿轮32b的齿数为“31”。通过使用摆线齿轮,实现了太阳齿轮32a与行星齿轮32b的齿数差“1”。由于太阳齿轮32a与行星齿轮32b的齿数差为“1”,因此由太阳齿轮32a和行星齿轮32b构成的内接式行星齿轮机构的减速比与行星齿轮32b的齿数相等。因此,控制用减速机构32的减速比为“31”。与由现有的普通行星齿轮机构能够实现的减速比大致为“4”至“10”左右的情况相比,得到了相对较大的减速比。
[0100]
这样,该图2所示的差速机构30将差动旋转机构3与控制用马达31组合而能够构成“转矩矢量化装置”。在图2所示的实施方式中,能够将控制用马达31输出的控制转矩利用控制用减速机构32放大,并传递给第二驱动轴2。传递到第二驱动轴2的控制转矩通过差动旋转机构3的作用而使第二驱动轴2旋转,并且使第一驱动轴1向与第二驱动轴2相反的旋转方向相对旋转。即,使第一驱动轴1和第二驱动轴2彼此反转。因此,通过对控制用马达31的控制转矩进行控制,能够积极地控制从动力源向第一驱动轴1和第二驱动轴2传递的驱动转矩的分配或分配率。即,能够对分别与第一驱动轴1和第二驱动轴2连结的左右驱动轮执行转矩矢量化。
[0101]
另外,图2所示的差速机构30如上所述,具备由“内接式行星齿轮机构”构成的控制用减速机构32,能够在控制用马达31与差动旋转机构3之间设定相对较大的减速比。因此,能够以相对较大的放大率放大控制用马达31的控制转矩,相应地能够实现控制用马达31的
小型化。因此,根据本公开的实施方式中的差动装置d,能够构成具有转矩矢量化功能的、紧凑且简单的差速机构30。
[0102]
图3所示的差动装置d对上述图1所示的差动装置d组合“控制用致动器”,构成了具有转矩矢量化功能的车辆用的差速机构。与此同时,该图3所示的差动装置d与动力源一起构成了具有转矩矢量化功能的动力单元40。
[0103]
该图3所示的差动装置d与图2所示的差速机构30同样地具备控制用马达31作为“控制用致动器”。另外,在图3所示的差动装置d中,在控制用马达31与差动旋转机构3和第二驱动轴2之间设有控制用减速机构41。即,控制用马达31与差动旋转机构3和第二驱动轴2经由控制用减速机构41连结。
[0104]
控制用减速机构41配置在旋转轴线al上。控制用减速机构41将控制用马达31输出的控制转矩放大并传递给第二旋转轴2。控制用减速机构41由具有第一太阳齿轮41a、第二太阳齿轮41b、第一小齿轮41c、第二小齿轮41d及行星架41e的一种“复合行星齿轮机构”构成。
[0105]
第一太阳齿轮41a配置在旋转轴线al上。第一太阳齿轮41a是“外齿轮”,安装于中空形状的太阳齿轮轴41f的一方(图3的右侧)的端部。第一太阳齿轮41a和太阳齿轮轴41f一体地旋转。太阳齿轮轴41f以能够与第二驱动轴2相对旋转的方式配置于第二驱动轴2的外周部分。太阳齿轮轴41f的另一方(图3的左侧)的端部与差动旋转机构3的差速器箱12连结。太阳齿轮轴41f和差速器箱12一体地旋转。
[0106]
第二太阳齿轮41b配置在旋转轴线al上。第二太阳齿轮41b是“外齿轮”,安装于第二驱动轴2的外周部分。第二太阳齿轮41b和第二驱动轴2一体地旋转。另外,第一太阳齿轮41a和第二太阳齿轮41b彼此相对旋转。
[0107]
第一小齿轮41c是与第一太阳齿轮41a相比直径较小的“外齿轮”,与第一太阳齿轮41a啮合。第二小齿轮41d是与第二太阳齿轮41b相比直径较小的“外齿轮”,与第二太阳齿轮41b啮合。第一小齿轮41c和第二小齿轮41d一体地旋转。如后所述,第一小齿轮41c和第二小齿轮41d由行星架41e以能够自转且能够绕旋转轴线al公转的方式支承。因此,第一小齿轮41c和第二小齿轮41d向自转方向一体地旋转。
[0108]
行星架41e配置在旋转轴线al上。行星架41e经由轴承42和轴承43支承于太阳齿轮轴41f和壳体6。另外,行星架41e经由轴承44支承于控制用马达31的控制转矩输出轴31b。因此,行星架41e、太阳齿轮轴41f和控制转矩输出轴31b分别彼此相对旋转。行星架41e将第一小齿轮41c和第二小齿轮41d以能够自转且能够绕旋转轴线al公转的方式进行支承。并且,控制用马达31的控制转矩经由后述的减速行星齿轮机构45输入到行星架41e的小齿轮轴41g。具体而言,第一小齿轮41c和第二小齿轮41d均支承于行星架41e的小齿轮轴41g。
[0109]
控制用减速机构41用于放大控制用马达31输出的控制转矩,优选为能够设定尽可能大的“减速比”。因此,该控制用减速机构41使由第一太阳齿轮41a和第一小齿轮41c构成的齿轮对的齿数比u
11
与由第二太阳齿轮41b和第二小齿轮41d构成的齿轮对的齿数比u
12
互不相同。由此,控制用减速机构41构成为第二太阳齿轮41b的转速相对于行星架41e的转速减少。
[0110]
例如,在图3所示的实施方式中,如图中括号内的数值所示,第一小齿轮41c的齿数为“17”,第二小齿轮41d的齿数为“18”,第一太阳齿轮41a的齿数为“40”,第二太阳齿轮41b
的齿数为“39”。在该情况下,齿数比u
11
为:
[0111]u11
=17/40=0.425。
[0112]
同样地,齿数比u
12
为:
[0113]u12
=18/39≈0.462。
[0114]
这样,通过使各太阳齿轮41a、41b的齿数互不相同,并且使各小齿轮41c、41d的齿数互不相同,从而齿数比u
11
和齿数比u
12
互不相同。
[0115]
并且,在图3所示的实施方式中,控制用减速机构41的减速比r为:
[0116]
r=1/{1-(40/17)
×
(18/39)}≈12。
[0117]
与由现有的普通行星齿轮机构能够实现的减速比大致为“4”至“10”左右的情况相比,能够得到相对较大的减速比。另外,减速比r在图3的括号内表示为“r=12”。
[0118]
这样,控制用减速机构41将控制用马达31的控制转矩输出轴31b的转速减速而将控制转矩放大。控制用减速机构41由一种复合行星齿轮机构构成,与使用了普通行星齿轮机构的减速机构相比,能够设定相对较大的减速比。因此,通过控制用减速机构41的大的减速作用、即对控制用马达31的控制转矩的大的转矩放大作用,能够实现控制用马达31的小型化及轻量化。因此,能够使差动装置d的体积小型化,进而能够提高差动装置d向车辆的搭载性。
[0119]
而且,如上所述,本公开的实施方式中的差动装置d在如上述那样设置用于转矩矢量化的控制用马达31的情况下,具备用于抑制该控制用马达31的连带旋转的机构。
[0120]
如上所述,本公开的实施方式中的差动装置d中,在第一驱动轴1和第二驱动轴2向相同方向等速地旋转的情况下,差动装置d(具体而言为差动旋转机构3)一体地连带旋转。在该情况下,如果控制马达31也一起连带旋转,则有可能引起差动装置d的动力传递效率的降低。因此,在该图3所示的差动装置d中,为了避免或抑制如上所述的控制用马达31的连带旋转,而设有减速行星齿轮机构45及增速行星齿轮机构46。即,在本公开的一个实施方式中,差动装置d也可以具备减速行星齿轮机构45及增速行星齿轮机构46。
[0121]
减速行星齿轮机构45配置在控制用马达31与控制用减速机构41的行星架41e之间,将控制用马达31输出的控制转矩放大并传递给行星架41e。另外,减速行星齿轮机构45在差速器齿圈13、第一驱动轴1和第二驱动轴2一体地旋转时,作为使行星架41e的转速相对于控制用马达31的控制转矩输出轴31b的转速减少的减速机构发挥功能。
[0122]
另外,减速行星齿轮机构45与第一驱动轴1和第二驱动轴2配置在同轴上、即配置在旋转轴线al上。减速行星齿轮机构45由单小齿轮型的行星齿轮机构构成,具有太阳齿轮、齿圈及行星架。在本公开的实施方式中,为了与其他行星齿轮机构的各旋转元件进行区别,将减速行星齿轮机构45的太阳齿轮、齿圈及行星架分别称为减速太阳齿轮45a、减速齿圈45b及减速行星架45c。
[0123]
减速太阳齿轮45a形成于中空形状的旋转轴的外周部分,以能够旋转的方式支承于壳体6。减速太阳齿轮45a与控制用马达31的控制转矩输出轴31b连结。减速太阳齿轮45a和控制转矩输出轴31b一体地旋转。
[0124]
减速齿圈45b是与减速行星齿轮机构45的行星齿轮45d啮合的“内齿轮”,以能够旋转的方式支承于壳体6。减速齿圈45b与后述的增速行星齿轮机构46的增速齿圈46b连结。减速齿圈45b和增速齿圈46b一体地旋转。
[0125]
减速行星架45c将行星齿轮45d以能够自转且公转的方式进行支承。减速行星架45c兼用作控制用减速机构41的行星架41e,该减速行星架45c和控制用减速机构41的行星架41e一体地旋转。如后所述,在差速器齿圈13、第一驱动轴1和第二驱动轴2一体地旋转时,减速行星架45c的转速相对于减速齿圈45b的转速减少。
[0126]
因此,减速行星齿轮机构45中,在从控制转矩输出轴31b传递控制转矩而减速太阳齿轮45a旋转的情况下,减速齿圈45b成为反作用力元件,减速行星架45c的转速相对于减速太阳齿轮45a的转速减少。即,减速行星齿轮机构45作为控制用马达31的减速齿轮机构发挥功能。因此,减速行星齿轮机构45在控制用马达31与行星架41e之间将控制用马达31输出的控制转矩放大,并传递给行星架41e。
[0127]
在图3所示的差动装置d中,如图中括号内的数值所示,减速行星齿轮机构45中的减速太阳齿轮45a的齿数为“24”,减速齿圈45b的齿数为“60”,行星齿轮45d的齿数为“18”。因此,该减速行星齿轮机构45的减速比为“3.5”。因此,由于上述控制用减速机构41的减速比r为“12”,所以附加了该减速行星齿轮机构45的减速比的、控制用减速机构41的实质的减速比r’为:
[0128]
r’=12
×
3.5=42。
[0129]
通过减速行星齿轮机构45的减速功能,得到了更大的减速比r’。
[0130]
另一方面,增速行星齿轮机构46与第一驱动轴1和第二驱动轴2配置在同轴上、即配置在旋转轴线al上。增速行星齿轮机构46由单小齿轮型的行星齿轮机构构成,具有太阳齿轮、齿圈及行星架。在本公开的实施方式中,为了与其他行星齿轮机构的各旋转元件进行区别,将增速行星齿轮机构46的太阳齿轮、齿圈及行星架分别称为增速太阳齿轮46a、增速齿圈46b及增速行星架46c。
[0131]
增速太阳齿轮46a形成于中空形状的轴构件的外周部分,并以不能旋转的方式被固定。例如,安装于与壳体6一体地形成的凸缘部分(未图示)。
[0132]
增速齿圈46b是与增速行星齿轮机构46的行星齿轮46d啮合的“内齿轮”,与减速行星齿轮机构45的减速齿圈45b一起以能够旋转的方式支承于壳体6。增速齿圈46b与减速齿圈45b连结。或者,增速齿圈46b与减速齿圈45b一体地形成。增速齿圈46b和减速齿圈45b一体地旋转。在增速行星架46c旋转时,增速齿圈46b的转速相对于增速行星架46c的转速增大。
[0133]
增速行星架46c将行星齿轮46d以能够自转且公转的方式进行支承。增速行星架46c与差速器齿圈13、差动旋转机构3的第一太阳齿轮15及控制用减速机构41的第一太阳齿轮41a连结。增速行星架46c与该差速器齿圈13、第一太阳齿轮15及第一太阳齿轮41a一体地旋转。
[0134]
因此,在从差速器齿圈13传递驱动转矩而增速行星架46c旋转的情况下,增速太阳齿轮46a成为反作用力元件,增速行星齿轮机构46作为使增速齿圈46b的转速相对于增速行星架46c的转速增大的增速机构发挥功能。
[0135]
在图3所示的差动装置d中,如图中括号内的数值所示,增速行星齿轮机构46中的增速太阳齿轮46a的齿数为“24”,增速齿圈46b的齿数为“60”,行星齿轮46d的齿数为“18”。即,增速太阳齿轮46a的齿数、增速齿圈46b的齿数及行星齿轮46d的齿数分别与上述减速行星齿轮机构45中的减速太阳齿轮45a的齿数、减速齿圈45b的齿数及行星齿轮45d的齿数相
等。因此,增速行星齿轮机构46和减速行星齿轮机构45的齿数比(或速度传递比、速度比)彼此相等。
[0136]
本公开的实施方式中的差动装置d中,在第一驱动轴1和第二驱动轴2向相同方向等速地旋转的情况下,差动装置d的整体一体地连带旋转。与此相伴,增速行星齿轮机构46的增速行星架46c和减速行星齿轮机构45的减速行星架45c向相同方向等速地旋转。在该情况下,增速行星齿轮机构46作为在停止了增速太阳齿轮46a的旋转的状态下使增速齿圈46b的转速相对于增速行星架46c的转速增大的增速机构发挥功能。另一方面,减速行星齿轮机构45作为使减速行星架45c的转速相对于减速齿圈45b的转速减少的减速机构发挥功能。增速行星架46c的转速与减速行星架45c的转速彼此相等。另外,由于增速齿圈46b与减速齿圈45b连结,因此该增速齿圈46b的转速与减速齿圈45b的转速也彼此相等。因此,增速行星齿轮机构46的增速比的绝对值与减速行星齿轮机构45的减速比的绝对值相等。在该情况下,由于增速太阳齿轮46a的转速为“0”,因此在减速行星齿轮机构45中,根据减速行星齿轮机构45的齿数比,减速太阳齿轮45a的转速相对于减速齿圈45b的转速减少到“0”或“0”附近的转速。在图3所示的差动装置d中,由于增速行星齿轮机构46的齿数比与减速行星齿轮机构45的齿数比相等,因此减速太阳齿轮45a的转速为“0”。因此,在如上所述那样第一驱动轴1和第二驱动轴2向相同方向等速地旋转,差动装置d一体地连带旋转的情况下,与减速太阳齿轮45a连结的控制用马达31的控制转矩输出轴31b的转速为“0”。即,控制用马达31的连带旋转被抑制。
[0137]
因此,根据该图3所示的差动装置d,能够抑制输出控制转矩的控制用马达31的连带旋转而提高动力单元40的动力传递效率。进而,能够提高搭载动力单元40的车辆的能量效率。另外,例如,在车辆在直行行驶的状态下急加速或急减速的情况下,由于控制用马达31的连带旋转被抑制,因此能够排除控制用马达31的惯性转矩的影响。因此,例如,即便不另外执行用于抵消或衰减控制用马达31连带旋转的情况下的惯性转矩的转矩的控制也可以,相应地能够减轻对控制用马达31进行控制的装置的负荷。进而,能够提高由该动力单元40及控制用马达31进行的转矩矢量化控制的控制性。
[0138]
并且,在该图3所示的差动装置d中,作为动力源设有驱动用马达47及制动机构48。具体而言,在动力轴49的一方(图3的右侧)的端部连结有驱动用马达47的输出轴47a。驱动用马达47产生使车辆加速的驱动转矩或使车辆制动的再生转矩。驱动用马达47例如由永磁式同步马达或感应马达等构成。在动力轴49的另一方(图3的左侧)的端部连结有制动机构48的旋转轴48a。制动机构48产生制动转矩作为所谓的负驱动转矩。制动机构48例如由利用通过通电而产生的磁吸引力来对规定的旋转构件进行制动的励磁工作型电磁制动器、或者利用由电动马达驱动的进给丝杠机构来产生摩擦制动力的电动制动器、或者利用由马达发电时产生的阻力来对规定的旋转构件进行制动的再生制动器等构成。因此,在该图3所示的差动装置d中,作为动力源,带制动功能的马达被组装于差速机构而被单元化。
[0139]
在动力轴49的中央部分安装有小齿轮50。小齿轮50和动力轴49一体地旋转。小齿轮50与反转齿轮51啮合。反转齿轮51以能够旋转的方式支承于壳体6。与此同时,反转齿轮51与作为转矩输入构件4的差速器齿圈52啮合。差速器齿圈52形成于差速器箱12的外周部分。差速器箱12和差速器齿圈52一体地旋转。因此,差速器齿圈52、差动旋转机构3的第一太阳齿轮15和控制用减速机构41的第一太阳齿轮41a一体地旋转。
[0140]
上述的反转齿轮51与小齿轮50相比直径较大且齿数较多。因此,由小齿轮50和反转齿轮51构成的齿轮对形成使差速器齿圈52即转矩输入构件4的转速相对于小齿轮50的转速减少的减速齿轮机构。因此,输入到动力轴49的动力源(在图3所示的例子中为驱动用马达47及制动机构48)的驱动转矩被如上所述的减速齿轮机构放大,并传递到差动装置d。
[0141]
这样,通过将驱动用马达47和制动机构48和本公开的实施方式中的差动装置d一起一体地进行组装,能够构成具有转矩矢量化功能的动力单元40。另外,本公开的实施方式中的差动装置d也可以是仅组装有驱动用马达47作为动力源的结构。在该情况下,能够构成具有转矩矢量化功能的马达驱动单元(未图示)。或者,也可以是仅组装有制动机构48作为动力源的结构。在该情况下,能够构成具有转矩矢量化功能的制动单元(未图示)。
[0142]
图4所示的差动装置d假定搭载于四轮驱动车辆,构成了所谓的中央差速机构60。即,该图4所示的差动装置d中,第一驱动轴1和第二驱动轴2分别在同轴上在车辆(未图示)的全长方向(图4的左右方向)的前后对向配置。
[0143]
该图4所示的差动装置d具备驱动用马达61作为动力源。驱动用马达61例如由永磁式同步马达或感应马达等构成。驱动用马达61与第一驱动轴1和第二驱动轴2一体地配置在同轴上、即一体地配置在旋转轴线al上。驱动用马达61输出对第一驱动轴1和第二驱动轴2进行驱动或制动的驱动转矩。
[0144]
驱动用马达61具有转子61a和将转子61a以能够旋转的方式进行支承的转子轴61b。转子轴61b以能够旋转的方式支承于壳体62。另外,壳体62兼用作驱动用马达61的壳体、差动装置d的壳体及控制用马达31的壳体。转子轴61b为中空轴,在其中空部分配置有第一驱动轴1。转子轴61b和第一驱动轴1彼此相对旋转。转子轴61b经由减速齿轮机构63与差动旋转机构3的转矩输入构件4连结。另外,在该图4所示的实施方式中,差动旋转机构3的差速器箱64相当于转矩输入构件4。差速器箱64与输入齿轮7即差动旋转机构3的第一太阳齿轮15、及控制用减速机构41的第一太阳齿轮41a一体地旋转。
[0145]
减速齿轮机构63将驱动用马达61输出的驱动转矩放大,并传递给差动旋转机构3的转矩输入构件4即差速器箱64。减速齿轮机构63由具有太阳齿轮63a、齿圈63b及行星架63c的单小齿轮型的行星齿轮机构构成。
[0146]
太阳齿轮63a形成于中空形状的旋转轴的外周部分,与驱动用马达61的转子轴61b连结。例如,一体地形成有太阳齿轮63a的中空轴与转子轴61b连结。或者,在转子轴61b的前端部分一体地形成有太阳齿轮63a。因此,太阳齿轮63a和转子轴61b一体地旋转。齿圈63b是与构成减速齿轮机构63的行星齿轮机构的行星齿轮63d啮合的“内齿轮”。齿圈63b以不能旋转的方式固定于壳体62的内壁部分。行星架63c将行星齿轮63c以能够自转且公转的方式进行支承。行星架63c与差速器箱64连结。行星架63c和差速器箱64一体地旋转。
[0147]
减速齿轮机构63中,当驱动用马达61输出的驱动转矩传递到太阳齿轮63a时,齿圈63b成为反作用力元件,与差速器箱64连结的行星架63c的转速相对于太阳齿轮63a的转速减小。即,减速齿轮机构63将驱动用马达61输出的驱动转矩放大,并向差动旋转机构3的转矩输入构件4传递。因此,由减速齿轮机构63构成了车辆的最终减速装置(末端传动齿轮)。
[0148]
这样,使用该图4所示的差动装置d,能够构成将驱动用马达61作为动力源一体地内置在同轴上的中央差速机构60。并且,能够将该图4所示的单轴构造的中央差速机构60作为动力单元搭载于四轮驱动车辆。即,使用本公开的实施方式中的差动装置d,能够构成兼
具中央差速机构60的功能和转矩矢量化的功能的紧凑的动力单元。
[0149]
另外,在本公开的实施方式的差动装置d中,除了上述控制用马达31之外,可以还使用产生对差动装置d的转矩输入构件4进行制动的转矩作为控制转矩的制动机构。例如,如图5所示,作为产生制动转矩的制动机构,可以使用励磁工作型电磁制动器70,该励磁工作型电磁制动器70利用通过对线圈71通电而产生的磁吸引力来对差动装置d的输入旋转元件进行制动。或者,如图6所示,也可以使用利用由电动马达81驱动的进给丝杠机构82来产生摩擦制动力的电动制动器80等。
[0150]
图7所示的差动装置d假定作为向左右驱动轮输出驱动转矩的动力源而搭载于车辆,构成了所谓的单轴构造的动力单元90。即,该图7所示的差动装置d中,第一驱动轴1和第二驱动轴2分别在同轴上在车辆的车宽方向(图7的左右方向)的左右对向配置。
[0151]
动力单元90具备驱动用马达91作为动力源。驱动用马达91例如由永磁式同步马达或感应马达等构成。驱动用马达91与第一驱动轴1和第二驱动轴2一体地配置在同轴上、即一体地配置在旋转轴线al上。驱动用马达91输出对第一驱动轴1和第二驱动轴2进行驱动或制动的驱动转矩。
[0152]
另外,驱动用马达91具有转子91a和将转子91a以能够旋转的方式进行支承的转子轴91b。转子轴91b以能够旋转的方式支承于壳体92。另外,壳体92兼用作驱动用马达91的壳体、差动装置d的壳体及后述的第一减速机构93和第二减速机构94的壳体全部。转子轴91b为中空轴,在其中空部分配置有第一驱动轴1。转子轴91b和第一驱动轴1彼此相对旋转。转子轴91b与差动旋转机构3的转矩输入构件4连结。另外,在该图7所示的实施方式中,差动旋转机构3中的输入齿轮7(第一太阳齿轮15)的旋转轴7a相当于转矩输入构件4。因此,转子轴91b和第一太阳齿轮15一体地旋转。
[0153]
而且,该图7所示的差动装置d具备第一减速机构93及第二减速机构94。第一减速机构93在旋转轴线al上配置在第一驱动轴1和与车宽方向的左右的任一方的驱动轮(未图示)连结的车轴之间。在图7所示的实施方式中,第一减速机构93配置在第一驱动轴1和与车宽方向的左侧(图7的左侧)的驱动轮连结的第一车轴95之间。同样地,第二减速机构94在旋转轴线al上配置在第二驱动轴2和与车宽方向的左右的另一方的驱动轮(未图示)连结的车轴之间。在图7所示的实施方式中,第二减速机构94配置在第二驱动轴2和与车宽方向的右侧(图7的右侧)的驱动轮连结的第二车轴96之间。因此,差动旋转机构3、驱动用马达91、第一减速机构93及第二减速机构94均配置在旋转轴线al上。
[0154]
第一减速机构93将第一驱动轴1的转矩放大并传递给第一车轴95。第一减速机构93由具有太阳齿轮93a、齿圈93b及行星架93c的单小齿轮型的行星齿轮机构构成。太阳齿轮93a形成于第一驱动轴1的前端、即第一驱动轴1的与形成有输出齿轮8(第二太阳齿轮17)的一侧相反的端部(图7的左侧的端部)。太阳齿轮93a和第一驱动轴1一体地旋转。齿圈93b是与构成第一减速机构93的行星齿轮机构的行星齿轮93d啮合的“内齿轮”。齿圈93b以不能旋转的方式固定于壳体92的内壁部分。行星架93c将行星齿轮93d以能够自转且公转的方式进行支承。行星架93c与第一车轴95连结。行星架93c和第一车轴95一体地旋转。
[0155]
因此,第一减速机构93中,当第一驱动轴1的转矩传递到太阳齿轮93a时,齿圈93b成为反作用力元件,与第一车轴95连结的行星架93c的转速相对于太阳齿轮93a的转速减少。即,第一减速机构93将第一驱动轴1的转矩放大,并向第一车轴95及驱动轮传递。
[0156]
另一方面,第二减速机构94将第二驱动轴2的转矩放大并传递给第二车轴96。第二减速机构94由具有太阳齿轮94a、齿圈94b及行星架94c的单小齿轮型的行星齿轮机构构成。太阳齿轮94a形成于第二驱动轴2的前端、即第二驱动轴2的与形成有行星架11的一侧相反的端部(图7的右侧的端部)。太阳齿轮94a和第二驱动轴2一体地旋转。齿圈94b是与构成第二减速机构94的行星齿轮机构的行星齿轮94d啮合的“内齿轮”。齿圈94b以不能旋转的方式固定于壳体92的内壁部分。行星架94c将行星齿轮94d以能够自转且公转的方式进行支承。行星架94c与第二车轴96连结。行星架94c和第二车轴96一体地旋转。
[0157]
因此,第二减速机构94中,当第二驱动轴2的转矩传递到太阳齿轮94a时,齿圈94b成为反作用力元件,与第二车轴96连结的行星架94c的转速相对于太阳齿轮94a的转速减少。即,第二减速机构94将第二驱动轴2的转矩放大,并向第二车轴96及驱动轮传递。
[0158]
这样,本公开的实施方式中的差动装置d能够与驱动用马达91、及第一减速机构93和第二减速机构94组合而构成作为车辆的驱动力源的动力单元。差动装置d、驱动用马达91、第一减速机构93及第二减速机构94全部配置在同一旋转轴线al上。因此,构成组装有本实施方式中的差动装置d的单轴构造的动力单元。此时,差动装置d配置于各减速机构93、94的上游侧。即,差动装置d配置在驱动用马达91与第一减速机构93和第二减速机构94之间。其结果是,由第一减速机构93和第二减速机构94放大之前的驱动转矩作用于差动装置d。因此,能够抑制施加于差动装置d的负荷,相应地能够抑制差动装置d的大型化。因此,根据本公开的实施方式中的差动装置d,能够构成紧凑且简单的单轴构造的动力单元90。
[0159]
图8所示的差动装置d与上述图7所示的动力单元90同样地构成了单轴构造的动力单元100。在该动力单元100中,使用“中空转子的驱动用马达”而实现了旋转轴线al方向上的体积的小型化。该图8所示的差动装置d中,第一驱动轴1和第二驱动轴2分别在同轴上在车辆的车宽方向(图8的左右方向)的左右对向配置。
[0160]
动力单元100具备驱动用马达101作为动力源。另外,具备第一减速机构93及第二减速机构94。在该动力单元100中,也与上述图7所示的动力单元90同样地,差动旋转机构3、驱动用马达101、第一减速机构93及第二减速机构94均配置在旋转轴线al上。
[0161]
驱动用马达101例如由永磁式同步马达或感应马达等构成。特别是,由于驱动用马达101使用如后所述的中空构造的转子101a,因此也可以采用省略了转子101a的铁芯的所谓无芯马达。驱动用马达101具有转子101a和将转子101a以能够旋转的方式进行支承的转子轴101b。
[0162]
转子101a为中空构造,在中空部分具有空间。并且,在转子101a的中空部分配置有差动旋转机构3。即,在驱动用马达101的中空构造的转子101a内置有差动旋转机构3。
[0163]
转子轴101b以能够旋转的方式支承于壳体92。转子轴101b为中空轴,在其中空部分配置有第一驱动轴1及第二驱动轴2。转子轴101b与第一驱动轴1和第二驱动轴2彼此相对旋转。转子轴101b与差动旋转机构3的转矩输入构件4连结。另外,在该图8所示的实施方式中,差动旋转机构3中的输入齿轮7(第一太阳齿轮15)的旋转轴7a相当于转矩输入构件4。因此,转子轴101b和第一太阳齿轮15一体地旋转。
[0164]
这样,在本公开的实施方式的差动装置d中,使用具有中空构造的转子101a的驱动用马达101。并且,在该转子101a的中空部分配置差动旋转机构3。即,差动旋转机构3内置于驱动用马达101的转子101a。因此,例如与如上述图7所示的动力单元90那样将驱动用马达
91和差动旋转机构3在旋转轴线al方向上串联配置的结构相比,动力单元100能够缩短旋转轴线al方向的全长。因此,根据本公开的实施方式中的差动装置d,能够构成缩短了旋转轴线al方向的全长的、更加紧凑且简单的单轴构造的动力单元100。
[0165]
图9所示的差动装置d使用省略“差速器箱”而简化的差动旋转机构111,构成了车辆用的差速机构110(开放式差速器)。
[0166]
差动旋转机构111成为省略了上述差动旋转机构3的差速器箱12的结构。因此,在差动旋转机构111中,设有输入板112。输入板112是凸缘状的旋转构件,安装于输入齿轮7(第一太阳齿轮15)的旋转轴7a的外周部分。输入板112和旋转轴7a一体地旋转。并且,在输入板112的外周部分安装有差速器齿圈13。输入板112和差速器齿圈13一体地旋转。因此,在该图9所示的实施方式中,输入齿轮7(第一太阳齿轮15)的旋转轴7a经由输入板112与差速器齿圈13、即转矩输入构件4连结。
[0167]
在该图9所示的差动装置d中,也使输入齿轮7(第一太阳齿轮15)与第一齿轮9(第一小齿轮18)之间的第一齿数比u1、和输出齿轮8(第二太阳齿轮17)与第二齿轮10(第二小齿轮19)之间的第二齿数比u2分别互不相同。
[0168]
例如,如图9中括号内的数值所示,差动装置d构成为第一齿轮9(第一小齿轮18)的齿数z1为“4”、第二齿轮10(第二小齿轮19)的齿数z2为“6”、输入齿轮7(第一太阳齿轮15)的齿数z3为“8”、输出齿轮8(第二太阳齿轮17)的齿数z4为“6”。在该情况下,第一齿数比u1和第二齿数比u2分别为:
[0169]
u1=z1/z3=4/8=0.5,
[0170]
u2=z2/z4=6/6=1.0。
[0171]
第一齿数比u1和第二齿数比u2彼此不一致而不同。
[0172]
并且,在该图9所示的差动装置d中,关于第一齿轮9(第一小齿轮18)的齿数z1、第二齿轮10(第二小齿轮19)的齿数z2、输入齿轮7(第一太阳齿轮15)的齿数z3及输出齿轮8(第二太阳齿轮17)的齿数z4,也将各齿数z1、z2、z3、z4设定成使如下关系成立:
[0173]
1/(1-z3/z1×
z2/z4)=-1。
[0174]
与上述的例子同样地,在各齿数z1、z2、z3、z4为图9的括号内所示的数值的情况下,1/(1-z3/z1×
z2/z4)=1/{1-(8/4)
×
(6/6)=-1,上述关系式成立。
[0175]
这样,本公开的实施方式中的差动装置d能够组装省略“差速器箱”而简化的差动旋转机构111来构成差速机构110。例如,在施加于差动装置d的负荷小的情况下,采用如上述那样简化的差动旋转机构111,能够构成更加紧凑且简单的差速机构110。
[0176]
图10所示的差动装置d使用由“齿圈”和“小齿轮(行星齿轮)”构成的两组行星齿轮机构,构成了车辆用的差速机构120(开放式差速器)。该图10所示的差动装置d具备第一驱动轴121和第二驱动轴122这两根主旋转轴、差动旋转机构123、及转矩输入构件124。
[0177]
第一驱动轴121和第二驱动轴122彼此在同轴上对向配置,并彼此相对旋转。具体而言,第一驱动轴121和第二驱动轴122均配置在旋转轴线al上。第一驱动轴121和第二驱动轴122分别经由规定的轴承(未图示)以能够旋转的方式支承于差动装置d的壳体6。另外,在图10所示的实施方式中,从图10的左侧起,按照第二驱动轴122、第一驱动轴121的顺序排列。因此,第一驱动轴121的一端(图10的左侧的端部)以能够旋转的方式支承于壳体6。第一驱动轴121在突出侧的前端(图10的右侧的端部)连结有车辆的左右任一方的驱动轮(未图
示)。同样地,第二驱动轴122的一端(图10的右侧的端部)以能够旋转的方式支承于壳体6。第二驱动轴122在突出侧的前端(图10的左侧的端部)连结有另一方的驱动轮(未图示)。
[0178]
差动旋转机构123配置在旋转轴线al上。差动旋转机构123能够进行第一驱动轴121与第二驱动轴122之间的差动旋转。作为主要的构成元件,差动旋转机构123与上述差动旋转机构3同样地由输入齿轮7、输出齿轮8、第一齿轮9、第二齿轮10及行星架11构成。
[0179]
输入齿轮7和输出齿轮8均在同一旋转轴线al上串联(即,在旋转轴线al方向上排列)配置。在图10所示的实施方式中,从图10的左侧起,按照输入齿轮7、输出齿轮8的顺序排列。
[0180]
并且,在图10所示的实施方式中,输入齿轮7是“内齿轮”的第一齿圈125,与第一齿轮9(即后述的第一小齿轮129)啮合。另外,输出齿轮8是“内齿轮”的第二齿圈126,与第二齿轮10(即,后述的第二小齿轮130)啮合。
[0181]
输入齿轮7(第一齿圈125)和输出齿轮8(第二齿圈126)能够相对旋转。在图10所示的实施方式中,输入齿轮7(第一齿圈125)的旋转轴7a为中空轴,在旋转轴7a的中空部分配置有第二驱动轴122。因此,旋转轴7a和第二驱动轴122能够相对旋转。
[0182]
输入齿轮7(第一齿圈125)的旋转轴7a经由输入板127与差速器齿圈13连结。输入板127是凸缘状的旋转构件,安装于旋转轴7a的外周部分。输入板127和旋转轴7a一体地旋转。并且,在输入板127的外周部分安装有差速器齿圈13。输入板127和差速器齿圈13一体地旋转。因此,在该图10所示的实施方式中,输入齿轮7(第一齿圈125)的旋转轴7a经由输入板127与差速器齿圈13、即转矩输入构件124连结。
[0183]
输出齿轮8(第二齿圈126)的旋转轴8a与第一驱动轴121连结。或者,旋转轴8a与第一驱动轴121一体地形成。旋转轴8a和第一驱动轴121一体地旋转。因此,输出齿轮8(第二齿圈126)和第一驱动轴121一体地旋转。输出齿轮8(第二齿圈126)和第一驱动轴121经由轴承128支承于壳体6。
[0184]
第一齿轮9和第二齿轮10相互在同轴上串联(即,在旋转轴线al方向上排列)配置。在图10所示的实施方式中,从图10的左侧起,按照第一齿轮9、第二齿轮10的顺序排列。第一齿轮9和第二齿轮10一体地旋转。如后所述,第一齿轮9和第二齿轮10由行星架11以能够自转且能够绕旋转轴线al公转的方式支承。
[0185]
并且,在图10所示的实施方式中,第一齿轮9是小直径的“外齿轮”的第一小齿轮129,与输入齿轮7即第一齿圈125啮合。另外,第二齿轮10是小直径的“外齿轮”的第二小齿轮130,与输出齿轮8即第二齿圈126啮合。
[0186]
行星架11配置在旋转轴线al上。行星架11经由轴承131支承于输出齿轮8(第二齿圈126)的旋转轴8a。行星架11和旋转轴8a彼此能够相对旋转。因此,行星架11与输入齿轮7(第一齿圈125)和输出齿轮8(第二齿圈126)彼此相对旋转。行星架11将第一小齿轮129和第二小齿轮130以能够自转且能够绕旋转轴线al公转的方式进行支承。具体而言,在图10所示的实施方式中,行星架11具有小齿轮轴11a和板部11b。在小齿轮轴11a一体地安装有第一小齿轮129和第二小齿轮130。小齿轮轴11a、第一小齿轮129和第二小齿轮130一体地旋转。板部11b将小齿轮轴11a以能够旋转的方式进行支承。板部11b与第二驱动轴122连结。板部11b和第二驱动轴122一体地旋转。因此,行星架11和第二驱动轴122一体地旋转。
[0187]
另外,由行星架11支承的第一小齿轮129、第二小齿轮130、小齿轮轴11a的组(为了
便于说明而称为“行星组”)在“行星组”的公转轨道(圆轨道)的圆周上设置有多组。在图10中,示出了两组“行星组”在公转轨道的径向上对向配置的结构。
[0188]
如上所述,在图10所示的实施方式中,差动装置d由第一驱动轴121、第二驱动轴122、差动旋转机构123及转矩输入构件124构成。在图10所示的差动装置d构成了针对车辆的左右驱动轮的差速机构120(开放式差速器)。作为差动装置d的主要构成元件的差动旋转机构123由输入齿轮7(第一齿圈125)、输出齿轮8(第二齿圈126)、第一齿轮9(第一小齿轮129)及第二齿轮10(第二小齿轮130)共四种齿轮和行星架11构成。第一齿轮9(第一小齿轮129)和第二齿轮10(第二小齿轮130)分别与输入齿轮7(第一齿圈125)和输出齿轮8(第二齿圈126)啮合,并且绕旋转轴线al公转。即,第一齿轮9(第一小齿轮129)和第二齿轮10(第二小齿轮130)都是行星齿轮机构的所谓的行星齿轮。总之,本公开的实施方式中的差动装置d由共用了行星架11的实质上为两组的行星齿轮机构、或组合了两组行星齿轮机构的复合行星齿轮机构构成。在图10所示的实施方式中,由不使用“太阳齿轮”的两组行星齿轮机构构成。与由“太阳齿轮”、“齿圈”及“小齿轮”这三个旋转元件构成的通常的行星齿轮机构相比,结构简单。
[0189]
本公开的实施方式的差动装置d中,在第一驱动轴121和第二驱动轴122向相同方向等速(相同转速)地旋转的情况下,第一驱动轴121和第二驱动轴122与差动旋转机构123一体地旋转。在该情况下,驱动转矩被等分配地传递给第一驱动轴121和第二驱动轴122。与此相对,在第一驱动轴121的转速与第二驱动轴122的转速不同的情况下,第一驱动轴121和第二驱动轴122彼此向相反方向相对旋转,进行差动旋转。
[0190]
因此,在差动装置d中,使输入齿轮7(第一齿圈125)与第一齿轮9(第一小齿轮129)之间的第一齿数比u1、和输出齿轮8(第二齿圈126)与第二齿轮10(第二小齿轮130)之间的第二齿数比u2分别互不相同。
[0191]
例如,如图10中括号内的数值所示,差动装置d构成为第一齿轮9(第一小齿轮129)的齿数z1为“17”、第二齿轮10(第二小齿轮130)的齿数z2为“20”、输入齿轮7(第一齿圈125)的齿数z3为“85”、输出齿轮8(第二齿圈126)的齿数z4为“50”。在该情况下,第一齿数比u1和第二齿数比u2分别为:
[0192]
u1=z1/z3=17/85=0.2,
[0193]
u2=z2/z4=20/50=0.4。
[0194]
第一齿数比u1和第二齿数比u2彼此不一致而不同。
[0195]
在如上述那样构成的差动装置d中,输入到转矩输入构件124(差速器齿圈13)的驱动转矩被分配并传递给输入齿轮7(第一齿圈125)和输出齿轮8(第二齿圈126)。此时,在第一驱动轴121的转速与第二驱动轴122的转速相等的情况下,输出齿轮8(第二齿圈126)和行星架11一体地旋转。
[0196]
具体而言,当向输入齿轮7(第一齿圈125)输入了驱动转矩时,第一齿轮9(第一小齿轮129)和第二齿轮10(第二小齿轮130)旋转。此时,由于第一齿轮9(第一小齿轮129)与输入齿轮7(第一齿圈125)之间的第一齿数比u1小于第二齿轮10(第二小齿轮130)与输出齿轮8(第二齿圈126)之间的第二齿数比u2,因此输入齿轮7(第一齿圈125)要比输出齿轮8(第二齿圈126)旋转得慢。相反地,输出齿轮8(第二齿圈126)要比输入齿轮7(第一齿圈125)旋转得快。因此,输入齿轮7(第一齿圈125)和输出齿轮8(第二齿圈126)要相对地彼此向相反方
向旋转。即,向第一齿轮9(第一小齿轮129)与输入齿轮7(第一齿圈125)的啮合部、及第二齿轮10(第二小齿轮130)与输出齿轮8(第二齿圈126)的啮合部作用相互反向的转矩。但是,实际上,第一齿轮9(第一小齿轮129)和第二齿轮10(第二小齿轮130)一体地旋转。因此,上述的各啮合部相互干涉。其结果是,差动装置d的差动旋转机构123整体实质上成为卡合状态,一体地旋转。即,输入齿轮7(第一齿圈125)、输出齿轮8(第二齿圈126)及行星架11全部一体地旋转。因此,第一驱动轴121和第二驱动轴122不进行差动旋转而一体地旋转。
[0197]
与此相对,在第一驱动轴121的转速与第二驱动轴122的转速之间存在转速差的情况下、即在输出齿轮8(第二齿圈126)与行星架11进行差动旋转的情况下,如上所述的由各啮合部的干涉引起的差动装置d的实质的卡合状态被解除。因此,在从转矩输入构件124(差速器齿圈13)到输出齿轮8(第二齿圈126)的动力传递路径、及从转矩输入构件124(差速器齿圈13)到行星架11的动力传递路径中,使输出齿轮8(第二齿圈126)和行星架11差动旋转,并且分别对它们传递驱动转矩。在该情况下,输出齿轮8(第二齿圈126)和行星架11根据构成如上所述的差动旋转机构123的复合行星齿轮机构的齿数比(减速比)进行差动旋转。
[0198]
并且,本公开的实施方式的差动装置d中,关于第一齿轮9(第一小齿轮129)的齿数z1、第二齿轮10(第二小齿轮130)的齿数z2、输入齿轮7(第一齿圈125)的齿数z3及输出齿轮8(第二齿圈126)的齿数z4,将各齿数z1、z2、z3、z4设定成使如下关系成立:1/(1-z3/z1×
z2/z4)=-1。与上述的例子同样地,在各齿数z1、z2、z3、z4为图10的括号内所示的数值的情况下,1/(1-z3/z1×
z2/z4)=1/{1-(85/17)
×
(20/50)=-1,上述关系式成立。
[0199]
上述关系式中的“1/(1-z3/z1×
z2/z4)”是输入齿轮7(第一齿圈125)的转速相对于行星架11的转速的比例的倒数,并且是附加了旋转方向的差动旋转机构123(复合行星齿轮机构)的减速比(在对减速比赋予了负号的情况下,意味着行星架11的旋转方向与输入齿轮7(第一齿圈125)的旋转方向相反)。因此,由于差动旋转机构123的减速比为
“‑
1”,因此在第一驱动轴121和第二驱动轴122差动旋转时,行星架11相对于输入齿轮7(第一齿圈125)和输出齿轮8(第二齿圈126)向相反的旋转方向以相等的转速旋转。即,第一驱动轴121和第二驱动轴122彼此向相反的旋转方向以相等的转速相对旋转。因此,根据本公开的实施方式中的差动装置d,能够在允许第一驱动轴121与第二驱动轴122之间的差动旋转的同时,将输入到转矩输入构件124(差速器齿圈13)的驱动转矩等分配地传递给第一驱动轴121和第二驱动轴122。
[0200]
这样,本公开的实施方式中的差动装置d实质上由两组行星齿轮机构、或复合行星齿轮机构构成主要部分,将从动力源输入的驱动转矩分配并传递给第一驱动轴121和第二驱动轴122。与此同时,允许第一驱动轴121与第二驱动轴122的差动旋转,并吸收该第一驱动轴121与第二驱动轴122之间的转速差。因此,根据本公开的实施方式中的差动装置d,能够构成紧凑且简单的差速机构120(开放式差速器)。
[0201]
图11所示的差动装置d使用由“齿圈”、“太阳齿轮”及“行星齿轮”构成的两组内接式行星齿轮机构,构成了车辆用的差速机构140(开放式差速器)。该图11所示的差动装置d具备第一驱动轴141和第二驱动轴142这两根主旋转轴、差动旋转机构143、及转矩输入构件144。
[0202]
第一驱动轴141和第二驱动轴142彼此在同轴上对向配置,并彼此相对旋转。具体而言,第一驱动轴141和第二驱动轴142均配置在旋转轴线al上。第一驱动轴141和第二驱动
轴142分别经由规定的轴承以能够旋转的方式支承于差动装置d的壳体6。另外,在图11所示的实施方式中,从图11的左侧起,按照第二驱动轴142、第一驱动轴141的顺序排列。因此,第一驱动轴141的一端(图11的左侧的端部)以能够旋转的方式支承于壳体6。第一驱动轴141在突出侧的前端(图11的右侧的端部)连结有车辆的左右任一方的驱动轮(未图示)。同样地,第二驱动轴142的一端(图11的右侧的端部)以能够旋转的方式支承于壳体6。第二驱动轴142在突出侧的前端(图11的左侧的端部)连结有另一方的驱动轮(未图示)。
[0203]
差动旋转机构143配置在旋转轴线al上。差动旋转机构143能够进行第一驱动轴141与第二驱动轴142之间的差动旋转。作为主要的构成元件,差动旋转机构143与上述差动旋转机构3同样地由输入齿轮7、输出齿轮8、第一齿轮9、第二齿轮10及行星架145构成。
[0204]
输入齿轮7和输出齿轮8均在同一旋转轴线al上串联(即,在旋转轴线al方向上排列)配置。在图11所示的实施方式中,从图11的左侧起,按照输入齿轮7、输出齿轮8的顺序排列。
[0205]
并且,在图11所示的实施方式中,输入齿轮7是“内齿轮”的输入齿圈146,与第一齿轮9(即后述的第一行星齿轮150)啮合。另外,输出齿轮8是“外齿轮”的输出太阳齿轮147,与第二齿轮10(即,后述的第二行星齿轮151)啮合。
[0206]
输入齿轮7(输入齿圈146)和输出齿轮8(输出太阳齿轮147)能够相对旋转。在图11所示的实施方式中,输入齿轮7(输入齿圈146)与差速器齿圈148连结。输入齿轮7(输入齿圈146)和差速器齿圈148一体地旋转。差速器齿圈148与上述差速器齿圈13同样地,是大直径的锥齿轮,与设置于车辆(未图示)的传动轴21的前端(图11所示的传动轴21的下侧的端部)的驱动小齿轮22啮合。因此,差速器齿圈148被从规定的动力源输入驱动转矩而成为转矩输入构件144。
[0207]
在图11所示的实施方式中,输入齿轮7(输入齿圈146)及差速器齿圈148的旋转轴7a为中空轴,在旋转轴7a的中空部分配置有第二驱动轴142。因此,旋转轴7a和第二驱动轴142能够相对旋转。
[0208]
输出齿轮8(输出太阳齿轮147)的旋转轴8a与第一驱动轴141连结。或者,旋转轴8a与第一驱动轴141一体地形成。旋转轴8a和第一驱动轴141一体地旋转。因此,输出齿轮8(输出太阳齿轮147)和第一驱动轴141一体地旋转。输出齿轮8(输出太阳齿轮147)和第一驱动轴141经由轴承149支承于壳体6。
[0209]
第一齿轮9和第二齿轮10相互在同轴上串联(即,在旋转轴线al方向上排列)配置。在图11所示的实施方式中,从图11的左侧起,按照第一齿轮9、第二齿轮10的顺序排列。第一齿轮9和第二齿轮10一体地旋转。如后所述,第一齿轮9和第二齿轮10由行星架145以能够自转且能够绕旋转轴线al公转的方式支承。
[0210]
并且,在图11所示的实施方式中,第一齿轮9是“外齿轮”的第一行星齿轮150,与输入齿轮7即输入齿圈146啮合。另外,第二齿轮10是“内齿轮”的第二行星齿轮151,与输出齿轮8即输出太阳齿轮147啮合。第一行星齿轮150和第二行星齿轮151一体地形成。在图11所示的实施方式中,第二行星齿轮151的内径比第一行星齿轮150的外径大。第一行星齿轮150与形成于第二行星齿轮151的内周部分的臂部151a连结。或者,在第二行星齿轮151的臂部151a一体地形成有第一行星齿轮150。因此,第一行星齿轮150和第二行星齿轮151一体地旋转。
[0211]
行星架145配置在旋转轴线al上。行星架145经由轴承152支承于输入齿轮7(输入齿圈146)及差速器齿圈148的旋转轴7a。行星架145和旋转轴7a彼此能够相对旋转。因此,行星架145与输入齿轮7(输入齿圈146)、差速器齿圈148和输出齿轮8(输出太阳齿轮147)彼此相对旋转。
[0212]
在图11所示的实施方式中,行星架145具有板部145a和行星轴145b。板部145a与第二驱动轴142连结。板部145a和第二驱动轴142一体地旋转。因此,行星架145和第二驱动轴142一体地旋转。行星轴145b是圆柱形状的轴构件,在从旋转轴线al向板部145a的外周侧偏心的位置处安装于板部145a。行星轴145b经由轴承153嵌入于第一行星齿轮150及第二行星齿轮151的自转轴孔150a。行星轴145b与第一行星齿轮150和第二行星齿轮151相对旋转。因此,行星架145将第一行星齿轮150和第二行星齿轮151以能够自转且能够绕旋转轴线al公转的方式进行支承。
[0213]
第一行星齿轮150的外径比输入齿圈146的内径小。另外,第一行星齿轮150的外齿的齿数比输入齿圈146的内齿的齿数少。因此,第一行星齿轮150一边与输入齿圈146啮合,一边在输入齿圈146的内周部分公转。因此,由输入齿圈146和第一行星齿轮150构成了所谓的“内接式行星齿轮机构”。
[0214]
同样地,第二行星齿轮151的内径比输出太阳齿轮147的外径大。另外,第二行星齿轮151的内齿的齿数比输出太阳齿轮147的外齿的齿数多。因此,第二行星齿轮151一边与输出太阳齿轮147啮合,一边在输出太阳齿轮147的外周部分公转。因此,由输出太阳齿轮147和第二行星齿轮151构成了所谓的“内接式行星齿轮机构”。
[0215]
因此,作为该图11所示的差动装置d的主要构成元件的差动旋转机构143由输入齿轮7(输入齿圈146)、输出齿轮8(输出太阳齿轮147)、第一齿轮9(第一行星齿轮150)及第二齿轮10(第二行星齿轮151)共四个齿轮和行星架145构成。总之,本公开的实施方式中的差动装置d由共用行星架145的两组“内接式行星齿轮机构”构成。即,在图11所示的实施方式中,由不使用“小齿轮”的两组“内接式行星齿轮机构”构成。与由“太阳齿轮”、“齿圈”及“小齿轮”这三个旋转元件构成的通常的行星齿轮机构相比,结构简单。
[0216]
本公开的实施方式的差动装置d中,在第一驱动轴141和第二驱动轴142向相同方向等速(相同转速)地旋转的情况下,第一驱动轴141和第二驱动轴142与差动旋转机构143一体地旋转。在该情况下,驱动转矩被等分配地传递给第一驱动轴141和第二驱动轴142。与此相对,在第一驱动轴141的转速与第二驱动轴142的转速不同的情况下,第一驱动轴141和第二驱动轴142彼此向相反方向相对旋转,进行差动旋转。
[0217]
因此,在差动装置d中,使输入齿轮7(输入齿圈146)与第一齿轮9(第一行星齿轮150)之间的第一齿数比u1、和输出齿轮8(输出太阳齿轮147)与第二齿轮10(第二行星齿轮151)之间的第二齿数比u2分别互不相同。
[0218]
例如,如图11中括号内的数值所示,差动装置d构成为第一齿轮9(第一行星齿轮150)的齿数z1为“10”、第二齿轮10(第二行星齿轮151)的齿数z2为“16”、输入齿轮7(输入齿圈146)的齿数z3为“15”、输出齿轮8(输出太阳齿轮147)的齿数z4为“12”。在该图11所示的实施方式的情况下,第一齿数比u1和第二齿数比u2分别为:
[0219]
u1=z1/z3=10/15≈0.666,
[0220]
u2=z4/z2=12/16=0.75。
[0221]
第一齿数比u1和第二齿数比u2彼此不一致而不同。
[0222]
在如上述那样构成的差动装置d中,输入到转矩输入构件144(差速器齿圈148)的驱动转矩被分配并传递给输入齿轮7(输入圈146)和输出齿轮8(输出太阳齿轮147)。此时,在第一驱动轴141的转速与第二驱动轴142的转速相等的情况下,输出齿轮8(输出太阳齿轮147)和行星架145一体地旋转。
[0223]
具体而言,当驱动转矩被输入到输入齿轮7(输入齿圈146)时,第一齿轮9(第一行星齿轮150)和第二齿轮10(第二行星齿轮151)旋转。此时,由于第一齿轮9(第一行星齿轮150)与输入齿轮7(输入齿圈146)之间的第一齿数比u1小于第二齿轮10(第二行星齿轮151)与输出齿轮8(输出太阳齿轮147)之间的第二齿数比u2,因此输入齿轮7(输入齿圈146)要比输出齿轮8(输出太阳齿轮147)旋转得慢。相反地,输出齿轮8(输出太阳齿轮147)要比输入齿轮7(输入齿圈146)旋转得快。因此,输入齿轮7(输入齿圈146)和输出齿轮8(输出太阳齿轮147)将要相对地彼此向相反方向旋转。即,向第一齿轮9(第一行星齿轮150)与输入齿轮7(输入齿圈146)的啮合部、及第二齿轮10(第二行星齿轮151)与输出齿轮8(输出太阳齿轮147)的啮合部作用相互反向的转矩。但是,实际上,第一齿轮9(第一行星齿轮150)和第二齿轮10(第二行星齿轮151)一体地旋转。因此,上述的各啮合部相互干涉。其结果是,差动装置d的差动旋转机构143整体实质上成为卡合状态,一体地旋转。即,输入齿轮7(输入齿圈146)、输出齿轮8(输出太阳齿轮147)及行星架145全部一体地旋转。因此,第一驱动轴141和第二驱动轴142不进行差动旋转而一体地旋转。
[0224]
与此相对,在第一驱动轴141的转速与第二驱动轴142的转速之间存在转速差的情况下、即在输出齿轮8(输出太阳齿轮147)与行星架145进行差动旋转的情况下,如上所述的由各啮合部的干涉引起的差动装置d的实质的卡合状态被解除。因此,在从转矩输入构件144(差速器齿圈148)到输出齿轮8(输出太阳齿轮147)的动力传递路径、及从转矩输入构件144(差速器齿圈148)到行星架145的动力传递路径中,使输出齿轮8(输出太阳齿轮147)和行星架145差动旋转,并且分别对它们传递驱动转矩。在该情况下,输出齿轮8(输出太阳齿轮147)和行星架145根据构成如上所述差动旋转机构143的复合行星齿轮机构(两组内接式行星齿轮机构)的齿数比(减速比)进行差动旋转。
[0225]
并且,在本公开的实施方式的差动装置d中,关于第一齿轮9(第一行星齿轮150)的齿数z1、第二齿轮10(第二行星齿轮151)的齿数z2、输入齿轮7(输入齿圈146)的齿数z3及输出齿轮8(输出太阳齿轮147)的齿数z4,将各齿数z1、z2、z3、z4设定成使如下关系成立:
[0226]
1/(1-z3/z1×
z2/z4)=-1。
[0227]
与上述的例子同样地,在各齿数z1、z2、z3、z4为图11的括号内所示的数值的情况下,1/(1-z3/z1×
z2/z4)=1/{1-(15/10)
×
(16/12)=-1,上述关系式成立。
[0228]
上述关系式中的“1/(1-z3/z1×
z2/z4)”是输入齿轮7(输入齿圈146)的转速相对于行星架145的转速的比例的倒数,并且是将旋转方向纳入考虑的差动旋转机构143(复合行星齿轮机构)的减速比(在对减速比赋予了负号的情况下,意味着行星架145的旋转方向与输入齿轮7(输入齿圈146)的旋转方向相反)。因此,由于差动旋转机构143的减速比为
“‑
1”,因此在第一驱动轴141和第二驱动轴142差动旋转时,行星架145相对于输入齿轮7(输入齿圈146)和输出齿轮8(输出太阳齿轮147)向相反的旋转方向以相等的转速旋转。即,第一驱动轴141和第二驱动轴142彼此向相反的旋转方向以相等的转速相对旋转。因此,根据本公
开的实施方式中的差动装置d,能够在允许第一驱动轴141与第二驱动轴142之间的差动旋转的同时,将输入到转矩输入构件144(差速器齿圈148)的驱动转矩等分配地传递给第一驱动轴141和第二驱动轴142。
[0229]
这样,在本公开的实施方式中的差速器d实质上由两组内接式行星齿轮机构构成主要部分。内接式行星齿轮机构是不使用小齿轮的简单的结构。并且,本公开的实施方式中的差动装置d将从动力源输入的驱动转矩分配并传递给第一驱动轴141和第二驱动轴142。与此同时,差动装置d允许第一驱动轴141与第二驱动轴142的差动旋转,并吸收该第一驱动轴141与第二驱动轴142之间的转速差。因此,根据本公开的实施方式中的差动装置d,能够构成紧凑且简单的差速机构140(开放式差速器)。
[0230]
本公开的实施方式中的差动装置d也能够代替上述差动旋转机构3,例如使用图10所示的差动旋转机构123或图11所示的差动旋转机构143来构成“中央差速机构”或具有转矩矢量化功能的“左右轮的差速机构”。
[0231]
例如,图12所示的差动装置d使用图11所示的差动旋转机构143,构成了搭载于四轮驱动车辆的中央差速机构160。在该图12所示的实施方式中,差动装置d的第一驱动轴141和第二驱动轴142分别在同轴上在车辆(未图示)的全长方向(图12的左右方向)的前后对向配置。另外,规定的动力源的输出轴(传动轴)161与车辆的全长方向平行地配置。因此,输出轴161与第一驱动轴141和第二驱动轴142相互平行地配置。
[0232]
另外,在图12所示的实施方式中,作为转矩输入构件144的差速器齿圈162成为大直径的“外齿轮”。差速器齿圈162与设置于输出轴161的驱动齿轮163啮合。驱动齿轮163是与差速器齿圈162相比直径较小的“外齿轮”。因此,由驱动齿轮163和差速器齿圈162构成了车辆的最终减速装置(末端传动齿轮)。
[0233]
图13所示的差动装置d使用图11所示的差动旋转机构143构成了差速机构170。在该图13所示的实施方式中,差动装置d的第一驱动轴141和第二驱动轴142分别在同轴上在车辆(未图示)的车宽方向(图13的左右方向)的左右对向配置。另外,与上述图2所示的实施方式同样地,设置有控制用马达31作为“控制用致动器”。并且,该图13所示的差动装置d组合控制用马达31和差动旋转机构143,构成了具有转矩矢量化功能的车辆用的差速机构170。
[0234]
另外,在上述各实施方式中,没有特别地对将各轴或各齿轮等以能够旋转的方式进行支承的轴承、及使壳体的内部成为液密状态的密封构件等进行说明,但这些轴承和密封构件如在上述各图中由各自的符号记载的那样配置。
- 该技术已申请专利。仅供学习研究,如用于商业用途,请联系技术所有人。
- 技术研发人员:矶野宏
- 技术所有人:丰田自动车株式会社
- 我是此专利的发明人
- 该领域下的技术专家
- 如您需求助技术专家,请点此查看客服电话进行咨询。
- 1、朱老师:1.聚合物绝缘材料老化 2.电力系统可靠性分析
- 如您是高校老师,可以点此联系我们加入专家库。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1
精彩留言,会给你点赞!
专利分类正在加载中....