一种竖向减震系统及稳定器的制作方法
1.本实用新型涉及摄影辅助设备领域,尤其涉及一种竖向减震系统及稳定器。
背景技术:
2.目前,在摄影辅助设备领域,为了更好的实现拍摄过程中画面的稳定性,已有一些竖向减震机构的稳定器,现有技术中的竖向减震机构能够解决使用者在拍摄过程中,步伐、手臂抖动等因素导致的竖直方向的震动,使拍摄装置能够始终处于竖直方向的某一点或某一条线上,能够达到拍摄轨道车等辅助设备拍摄的效果。但是,在现有技术中,竖向减震机构稳定器往往需要使用者单手握举着拍摄,一方面无法实现一些低角度的拍摄,另一方面设备较重无法实现长时间拍摄。
技术实现要素:
3.针对上述问题,本实用新型提供一种竖向减震系统及稳定器,旨在解决现有的竖向减震系统无法实现低角度拍摄、无法长时间拍摄等问题。
4.本实用新型采取以下技术方案实现上述目的:
5.一种竖向减震系统,包括竖向保持电机、把手、竖向减震装置;其中,所述竖向保持电机包括相对转动的第一端和第二端;所述竖向减震装置包括相对运动的第一端和第二端;所述竖向保持电机的轴线与竖向减震装置第一端和第二端相对运动的方向垂直;所述把手与竖向保持电机的第一端固定连接,竖向保持电机的第二端与竖向减震装置的第一端固定连接,竖向减震装置的第二端用于连接负载。
6.本技术方案中,竖向保持电机用于保持竖向减震装置的第一端和第二端沿竖向运动,在使用过程中,通过竖向保持电机的调节(竖向保持电机的调节可以是使用者手动调节,也可以是电机的自动调节),使得无论把手相对竖向呈任意角度,竖向减震装置的第一端和第二端始终保持在竖直方向上相对运动,一方面能够方便使用者握持实现低位拍摄,另一方面能够旋转竖向保持电机至把手位于竖向减震装置的上方,实现提壶式姿态进行拍摄,该姿态拍摄使用者省力,能够长时间拍摄,使用者不仅可以采用现有技术中握持竖向减震装置的第一端,还可以调整把手至舒适的位置进行握持;此外,负载可以是拍摄装置和/或云台。
7.进一步的技术方案为,还包括竖向保持电机控制器、用于测量竖向减震装置相对竖直方向偏移角度的陀螺仪,所述竖向保持电机控制器接收来自陀螺仪的偏移角度信号并生成用于控制竖向保持电机动作的输出信号。本技术方案中,角度控制器接收来自陀螺仪的偏移角度信号并生成用于控制竖向保持电机动作的输出信号,初始时刻竖向保持电机的处于通电状态,故竖向保持电机的第一端和第二端固定在相对静止的状态,把手能够带动竖向减震装置一同摆动,此时,陀螺仪检测到竖向减震装置相对竖向的偏移角度,角度控制器接收来自陀螺仪的偏移角度并驱动竖向保持电机转动,即带动竖向减震装置沿竖向保持电机的电机轴相对把手转动,使竖向减震装置沿偏移方向的反方向转动,从而将竖向减震
装置定位在竖直方向上,即竖向减震装置的第一端和第二端始终在竖向上相对运动。
8.进一步的技术方案为,还包括转轴和竖向导轨,所述把手为“u”形结构,所述竖向保持电机的第一端与“u”形结构开口处的一端固定连接,开口处的另一端通过转轴与竖向导轨转动连接;所述转轴与竖向保持电机同轴布设;所述竖向导轨与竖向减震装置第一端和第二端的运动方向平行,所述竖向减震装置的第二端还与竖向导轨滑动连接。本技术方案中的“u”形结构把手能够方便使用者双手握持,更加省力,能够长时间拍摄,还可以实现提壶姿态的拍摄。
9.进一步的技术方案为,竖向导轨还通过第一连杆与竖向减震装置的第一端固定连接,竖向减震装置的第二端还设有第二连杆,所述第二连杆的一端与竖向减震装置的第二端固定连接、另一端设有与竖向导轨相配合的滑块。本技术方案中,通过竖向导轨、第一连杆、第二连杆和竖向减震装置形成四边形框架结构,能够提高竖向减震系统的稳定性,能够搭载较重的负载。
10.进一步的技术方案为,竖向减震装置还包括外壳、中轴、卷簧、卷簧壳体、传动连接的转动轮和条形杆,所述中轴与外壳转动连接,所述中轴与转动轮传动连接,所述条形杆与外壳在竖直方向上滑动连接、且条形杆还与竖向减震装置的第二端刚性固定连接;所述卷簧壳体与中轴转动连接,所述卷簧的内端与中轴固定连接、外端与卷簧壳体固定连接;所述卷簧壳体与外壳固定连接,且所述卷簧壳体或外壳中的至少一个与竖向减震装置的第一端刚性固定连接。
11.本技术方案中,由于卷簧在使用过程中的力矩变化较小,因此,在竖向产生震动时,卷簧施加给转动轮支撑条形杆(竖向减震装置第二端的负载)的力大致恒定;具体的减震过程为:初始时刻,负载安装至竖向减震装置第二端,其重力带动条形杆向下运动,从而带动转动轮和中轴转动,即压缩卷簧(卷簧的圈数增加),卷簧的回弹力支撑负载;当受到竖向震动时(即竖向减震装置的第一端产生竖向力时),通过竖向减震装置将竖向的运动转换为中轴带动转动轮沿条形杆平稳地转动,而不带动竖向减震装置的第二端(即负载)在竖直方向上运动,因此,在竖向震动过程中,负载在竖直方向上始终处于平衡状态;从外,还可以采用下述技术方案中的竖向减震装置及现有技术中的渐开线轮、渐开线配合的竖向减震装置。
12.进一步的技术方案为,竖向减震装置还包括外壳、中轴、卷簧、卷簧壳体、传动连接的转动轮和条形杆,所述中轴与外壳固定连接,所述中轴与转动轮转动连接;所述条形杆与外壳在竖直方向上滑动连接,所述条形杆还与竖向减震装置的第二端刚性固定连接;所述外壳与竖向减震装置的第一端刚性固定连接;所述卷簧壳体套设于中轴的外部、且与转动轮固定连接;所述卷簧的内端与中轴固定连接、外端与卷簧壳体固定连接。
13.本技术方案中,由于卷簧在使用过程中的力矩变化较小,因此,在竖向震动过程中,卷簧施加给转动轮支撑条形杆(竖向减震装置第二端的负载)的力大致恒定;具体的减震过程为:初始时刻,负载安装至竖向减震装置第二端,其重力带动条形杆向下运动,从而带动转动轮和卷簧壳体转动,即压缩卷簧(卷簧的圈数增加),卷簧的回弹力支撑负载;当受到竖向震动时(即竖向减震装置的第一端产生竖向力时),通过竖向减震装置将竖向的运动转换为卷簧壳体带动转动轮沿条形杆平稳地转动,而不带动竖向减震装置的第二端(即负载)在竖直方向上运动,因此,在竖向震动过程中,负载在竖直方向上始终处于平衡状态。
14.进一步的技术方案为,竖向减震装置还包括外壳、弹性件、与外壳转动连接的中轴、同轴布设在中轴外环的第一齿轮和第二齿轮、与第一齿轮传动连接的第一条形杆、与第二齿轮传动连接的第二条形杆;其中,所述第一齿轮的外径大于第二齿轮的外径;所述第一条形杆、第二条形杆分别与外壳在竖直方向上滑动连接;所述第一条形杆与竖向减震装置的第二端刚性固定连接,所述第二条形杆设有弹性件连接部;所述弹性件的一端连接至弹性件连接部,另一端连接至与外壳固定连接的端盖;所述负载的重力施加中轴沿第一方向旋转的转矩,所述弹性件的回弹力施加中轴沿与第一方向相反的第二方向旋转的转矩;所述外壳与竖向减震装置的第一端刚性固定连接。
15.本技术方案中,采用两个外径不同的齿轮同轴布设,形成一种变速机构;当受到竖向震动时(即竖向减震装置的第一端产生竖向力时),第二齿轮沿第二条形杆运动的线型距离要小于第一齿轮沿第一条形杆运动的线型距离,即弹性件在震动情况下行程变化较小,因此,在使用过程中的力矩变化较小,即弹性件通过变速机构施加给第一齿轮支撑第一条形杆(竖向减震装置第二端的负载)的力大致恒定;具体的减震过程为:初始时刻,负载安装至竖向减震装置第二端,其重力带动第一条形杆向下运动(带动中轴沿第一方向旋转),从而带动第一齿轮和第二齿轮转动,弹性件的回弹力通过第二条形杆、第二齿轮传递给中轴,施加给中轴沿第二方向旋转的力矩,弹性件的回弹力支撑负载;当受到竖向震动时,通过竖向减震装置将竖向的运动转换为第一齿轮沿第一条形杆、第二齿轮沿第二条形杆平稳地转动,而不带动竖向减震装置的第二端(即负载)在竖直方向上运动,因此,在竖向震动过程中,负载在竖直方向上始终处于平衡状态。
16.进一步的技术方案为,第一条形杆、第二条形杆分别设有与第一齿轮和第二齿轮配合的第一齿条和第二齿条。通过齿轮与齿条的配合实现第一齿轮和第二齿轮分别沿第一齿条和第二齿条转动。
17.进一步的技术方案为,第一齿条和第二齿条的朝向相同。本技术方案中,若上述弹性件采用压簧,则竖向减震装的第二端位于弹性件的上方,能够实现减震效果;若上述弹性件采用拉簧,则竖向减震装的第二端位于弹性件的下方,能够实现减震效果。
18.进一步的技术方案为,第一齿条和第二齿条的朝向相反。本技术方案中,若上述弹性件采用拉簧,则竖向减震装的第二端位于弹性件的上方,能够实现减震效果;若上述弹性件采用压簧,则竖向减震装的第二端位于弹性件的下方,能够实现减震效果。
19.进一步的技术方案为,竖向减震系统还包括用于测量竖向减震装置的第二端竖向位置的位置传感器、位置控制器和电机,其中,所述位置控制器接收来自位置传感器的竖向位置信号并生成用于控制电机动作的输出信号,所述电机包括设有电机轴的转动端和搭载电机铁芯的固定端,所述转动端与中轴传动连接,所述固定端与外壳固定连接。
20.本技术方案中,电机的转矩带动中轴与外壳相对运动,使竖向减震装置第二端的负载沿震动方向的反方向运动,从而将负载定位在竖向上的确定位置,可以进一步的精确控制负载一直位于竖向上的确定位置。一种稳定器,包括上述竖向减震系统、及与竖向减震装置第二端连接的云台。
21.进一步的技术方案为,竖向减震装置的第二端连接有固定云台底部电机的夹持机构。
22.本实用新型的有益效果是:
23.本实用新型提供的一种竖向减震系统及稳定器,通过竖向保持电机的调节(竖向保持电机的调节可以是使用者手动调节,也可以是电机的自动调节),使得无论把手相对竖向呈任意角度,竖向减震装置的第一端和第二端始终保持在竖直方向上相对运动,一方面能够方便使用者握持实现低位拍摄,另一方面能够调节竖向保持电机至把手与竖向减震装置呈任意角度的姿态进行拍摄,尤其是把手位于竖向减震装置的上方,实现提壶式姿态进行拍摄,该姿态拍摄使用者省力,能够长时间拍摄,此外,使用者不仅可以采用现有技术中握持竖向减震装置的第一端,还可以调整把手至舒适的位置进行握持。
附图说明
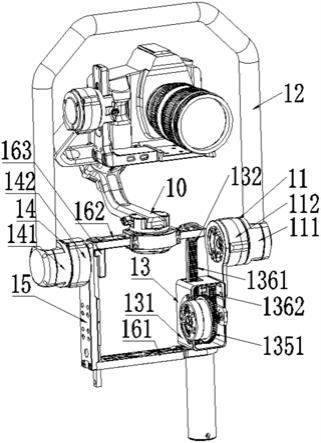
24.图1为:本实用新型所述竖向减震系统第一种握持姿态的结构示意图。
25.图2为:本实用新型所述竖向减震系统第二种握持姿态的结构示意图。
26.图3为:本实用新型所述带有拉簧的竖向减震系统结构示意图。
27.图4为:本实用新型所述第一齿条和第二齿条朝向相反竖向减震系统示意图。
28.图5为:本实用新型所述带有变速机构的竖向减震装置示意图。
29.图6为:本实用新型所述第一种卷簧结构的竖向减震装置示意图。
30.图7为:本实用新型所述第二种卷的竖向减震装置示意图。
31.图8为:本实用新型所述“j”形把手的竖向减震装置示意图。
32.图中:
33.11、竖向保持电机;111、竖向保持电机第一端;112、竖向保持电机第二端;12、把手; 13、竖向减震装置;131、竖向减震装置第一端;132、竖向减震装置第二端;133、外壳;134、中轴;135、转动轮;1351、第一齿轮;1352、第二齿轮;136、条形杆;1361、第一条形杆; 1362、第二条形杆;137、卷簧;1371、弹性件;138、卷簧壳体;139、弹性件安装部;130、端盖;14、转轴;141、转轴第一端;142、转轴第二端;15、竖向导轨;161、第一连杆;162、第二连杆;163、滑块;17、夹持机构;18、减震球。
具体实施方式
34.下面结合附图1至图8和具体实施方式对本实用新型进行详细说明,在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合,其中,以下实施方式中的“固定连接”、“连接”等连接关系包括部件之间的直接连接、通过中间件的间接连接等,在刚性固定连接的方案中,则可通过刚性中间件进行固定连接;“传动连接”指的是包括运动传递的连接,例如,下述实施方式中通过传动轮与齿条、传动轮与同步带、齿轮与同步带、齿轮与齿条、齿轮与齿轮啮合的连接方式、或通过同轴固定连接的连动方式等。
35.现有技术中的该类竖向减震系统包括弹性件连接的第一端和第二端,以第二端搭设稳定器或拍摄装置为例,则第一端为使用者握持端,当产生往复的竖向震动时(由于步伐等因素,第一端发生震动),弹性件抵消向上或向下的震动,而不传递到搭载稳定器或拍摄装置的第二端,使拍摄的画面稳定;但现有技术中的竖向减震系统中,使用者握持端为竖向减震系统的第一端,因此,在使用过程中,需要保持竖向减震系统始终保持竖直状态,这就影响了很多场景的拍摄,在搭载大型云台或拍摄设备情况下,使用者无法长时间拍摄。
36.本实施方式提供一种竖向减震系统,如图1、图2、图5所示,该系统包括竖向保持电
机 11、把手12、竖向减震装置13;其中,所述竖向保持电机11包括相对转动的电机第一端111 和电机第二端112;竖向减震装置13包括相对运动的竖向减震装置第一端131和竖向减震装置第二端132;竖向保持电机11的轴线与竖向减震装置13第一端和第二端相对运动的方向垂直;把手12与竖向保持电机11的电机第一端111固定连接,竖向保持电机11的电机第二端12与竖向减震装置13的第一端固定连接,竖向减震装置13的第二端用于连接负载,具体的,本实施方式通过三轴云台间接连接拍摄装置;
37.本实施方式中的具体竖向减震装置13如图5所示,包括外壳133、弹性件1371、与外壳转动连接的中轴134、同轴布设在中轴134外环的第一齿轮1351和第二齿轮1352、与第一齿轮1351传动连接的第一条形杆1361、与第二齿轮1352传动连接的第二条形杆1362;弹性件 1371具体为压簧,竖向减震装置第一端131位于竖向减震装置第二端132的上方,如图1、图2所示,第一条形杆1361、第二条形杆1362分别设有与第一齿轮1351和第二齿轮1352 配合的第一齿条和第二齿条,其中,第一齿条和第二齿条的朝向相同,所述第一齿轮1351的外径大于第二齿轮1352的外径;第一条形杆1361、第二条形杆1362分别与外壳133在竖直方向上滑动连接,具体的,外壳133分别设有与第一条形杆1361和第二条形杆1362相配合的滑槽,从而实现滑动连接;所述第一条形杆1361与竖向减震装置第二端132刚性固定连接,第二条形杆1362设有弹性件1371连接部139;所述弹性件1371的一端连接至弹性件连接部 139,另一端连接至与外壳133固定连接的端盖130;所述负载的重力施加中轴134沿第一方向旋转的转矩,所述弹性件1371的回弹力施加中轴134沿与第一方向相反的第二方向旋转的转矩;外壳133与竖向减震装置第一端131刚性固定连接;
38.本实施方式的竖向减震装置13采用两个外径不同的齿轮同轴布设,形成一种变速机构;当受到竖向震动时(即竖向减震装置第一端131产生竖向力时),第二齿轮1352沿第二条形杆1362运动的线型距离要小于第一齿轮1351沿第一条形杆1361运动的线型距离,即压簧在震动情况下行程变化较小,因此,在使用过程中的力矩变化较小,即弹性件1371通过变速机构施加给第一齿轮1351支撑第一条形杆1361(竖向减震装置第二端132的负载)的力大致恒定;具体的减震过程为:初始时刻,负载安装至竖向减震装置第二端132,其重力带动第一条形杆1361向下运动,从而带动第一齿轮1351和第二齿轮1352转动(施加中轴134沿第一方向转动的转矩),第二齿轮1352施加给第二条形杆1362与压簧回弹力相反的力(压簧回弹力施加中轴134沿第二方向转动的转矩),压簧的回弹力支撑负载;当受到竖向震动时,通过竖向减震装置将竖向的运动转换为第一齿轮1351沿第一条形杆1361、第二齿轮1352沿第二条形杆1362平稳地转动,而不带动竖向减震装置第二端132(即负载)在竖直方向上运动,因此,在竖向震动过程中,负载在竖直方向上始终处于平衡状态;
39.本实施方式中具体的把手12结构为“u”形结构,竖向减震系统还包括转轴14、竖向导轨15、第一连杆161、第二连杆162,所述竖向保持电机11的第一端与“u”形结构开口处的一端固定连接,开口处的另一端通过转轴14与竖向导轨15转动连接,具体的转轴14包括相对转动的转轴第一端141和转轴第二端142,转轴第一端141与“u”形结构开口处的端部固定连接,转轴第二端142与竖向导轨15的侧壁固定连接,转轴14与竖向保持电机11同轴布设;所述竖向导轨15与竖向减震装置第一端131和竖向减震装置第二端132的运动方向平行,所述竖向减震装置第二端132设有第二连杆162,第二连杆162的一端与竖向减震装置第二端132固定连接、另一端设有与竖向导轨15相配合的滑块163,竖向导轨15还通过第一连杆161
与竖向减震装置第一端131固定连接;本实施方式中,通过“u”形结构把手12的开口处增设一个矩形支撑机构,通过竖向导轨15、第一连杆161、第二连杆162和竖向减震装置13形成四边形框架结构,能够提高竖向减震系统的稳定性,能够搭载较重的负载;
40.本实施方式的竖向保持电机11具体为伺服电机,可通过手持部的调节旋钮进行调节,用于将竖向减震装置13保持在竖直方向,即根据拍摄场景或把手12的握持角度调节竖向保持电机11,当竖向保持电机11处于通电状态时,竖向保持电机第一端111和竖向保持电机第二端112的相对角度不变,需要通过调节旋钮进行调节或在较大的外力作用下改变上述相对角度,故在不改变把手握持角度的使用状态下,使竖向减震装置13处于竖直状态;
41.本实施方式的竖向减震系统,一方面能够方便使用者握持实现低位拍摄,另一方面能够旋转竖向保持电机11至把手位于竖向减震装置13的上方,实现提壶式姿态进行拍摄,该姿态拍摄使用者省力,能够长时间拍摄,此外,使用者不仅可以采用现有技术中握持竖向减震装置第一端131,还可以调整把手12至舒适的位置进行握持。
42.上述实施方式中竖向减震装置13的弹性件1371还可以采用其他具体的部件替代,例如拉簧,如图3所示,当采用拉簧时,所述竖向减震装置第二端132需要位于拉簧的下方,即负载的重力带动第一条形杆1361向下运动,通过第一齿轮1351施加给中轴134第一方向的转矩,拉簧的回弹力通过第二条形杆1362、第二齿轮1352传递给中轴134第二方向的转矩用于支撑负载。
43.上述实施方式中的第一条形杆1361上的第一齿条、第二条形杆1362上的第二齿条的朝向还可以相对布设,在本实施方式中,若弹性件采用拉簧,则竖向减震装第二端132位于拉簧的上方;若上述弹性件采用压簧,则竖向减震装置第二端132位于弹性件的下方;以采用压簧的方式为例,如图4所示,竖向减震装置第二端132位于压簧的下方,当安装负载时,其重力带动第一条形杆1361向下运动,通过第一齿轮1351传递给中轴沿第一方向转动,由于第一齿条和第二齿条的朝向相反,则压簧的回弹力则通过第二条形杆1362和第二齿轮1352 传递给中轴反向的转矩,用于支撑负载。
44.上述实施方式示例性的示出了把手12的具体结构,根据其他实施方式或实际应用,把手 12还可以为其他结构,例如图8所示,把手12为“j”形结构,竖向减震装置第一端131与竖向保持电机11的电机第二端112固定连接,竖向减震装置第二端132直接连接云台或拍摄装置,也能够实现低位拍摄、方便使用者长时间握持;此外竖向导轨15、第一连杆161、第二连杆162在一些单手握持的实施方式是非必要的,把手12的形状结构还可以根据使用者的实际握持舒适条件而定,在此不一一列举。
45.上述实施方式示例性的示出了竖向减震装置的具体结构,在其他实施方式还可以通过其他结构替代,例如图6所示,竖向减震装置还包括外壳133、中轴134、卷簧137、卷簧壳体 138、传动连接的转动轮135和条形杆136,具体的条形杆136上设有与转动轮135配合的齿条,还可以通过同步带的方式传动连接;所述中轴134与外壳133转动连接,具体通过轴承实现转动连接,还可以通过间隙配合等方式转动连接;所述中轴134与转动轮135传动连接,具体的中轴134与转动轮135同轴固定连接,还可以通过小齿轮等中间件传动连接;所述条形杆136与外壳133在竖直方向上滑动连接、且条形杆136还与竖向减震装置13的第二端刚性固定连接,具体的外壳133设有与条形杆136相配合的滑槽,通过条形杆136与滑槽的配合实现滑动连接;所述卷簧壳体138与中轴134转动连接,具体的采用轴承实现转动连接,所述
卷簧137的内端与中轴134固定连接、外端与卷簧壳体138固定连接;所述卷簧壳体138 与外壳133固定连接,且所述卷簧壳体138与竖向减震装置第一端131刚性固定连接,在其他实施方式中,外壳133与竖向减震装置第一端131刚性固定连接或竖向减震装置第一端131 同时与卷簧壳体138和外壳133刚性固定连接,其减震效果是一样可以实现的;本实施方式中由于卷簧137在使用过程中的力矩变化较小,因此,在竖向产生震动时,卷簧137施加给转动轮135支撑条形杆136(竖向减震装置第二端132的负载)的力大致恒定;具体的减震过程为:初始时刻,负载安装至竖向减震装置第二端132,其重力带动条形杆136向下运动,从而带动转动轮135和中轴134转动,即压缩卷簧137(卷簧的圈数增加),卷簧137的回弹力支撑负载;当受到竖向震动时(即竖向减震装置第一端131产生竖向力时),通过竖向减震装置13将竖向的运动转换为中轴134带动转动轮135沿条形杆136平稳地转动,而不带动竖向减震装置第二端132(即负载)在竖直方向上运动,因此,在竖向震动过程中,负载在竖直方向上始终处于平衡状态;
46.或如图7所示,所述竖向减震装置还包括外壳133、中轴134、卷簧137、卷簧壳体138、传动连接的转动轮135和条形杆136,所述中轴134与外壳133固定连接,所述中轴134与转动轮135转动连接,具体的通过轴承实现转动连接,或采用间隙配合实现转动连接;所述条形杆136与外壳133在竖直方向上滑动连接,所述条形杆136还与竖向减震装置第二端132 刚性固定连接;所述外壳133与竖向减震装置13的第一端刚性固定连接;所述卷簧壳体138 套设于中轴134的外部、且与转动轮135固定连接;所述卷簧137的内端与中轴134固定连接、外端与卷簧壳体138固定连接;具体的减震过程为:初始时刻,负载安装至竖向减震装置第二端132,其重力带动条形杆136向下运动,从而带动转动轮135和卷簧壳体138转动,即压缩卷簧137(卷簧的圈数增加),卷簧137的回弹力支撑负载;当受到竖向震动时(即竖向减震装置第一端131产生竖向力时),通过竖向减震装置13将竖向的运动转换为卷簧壳体138带动转动轮135沿条形杆136平稳地转动,而不带动竖向减震装置第二端132(即负载)在竖直方向上运动,因此,在竖向震动过程中,负载在竖直方向上始终处于平衡状态;从外,还可以采用现有技术中的渐开线轮、渐开线配合的竖向减震装置。
47.另一实施方式,为了更好的保持竖向减震装置13在使用过程中始终处于竖直状态,竖向减震系统还包括竖向保持电机控制器、用于测量竖向减震装置相对竖直方向偏移角度的陀螺仪,所述竖向保持电机控制器接收来自陀螺仪的偏移角度信号并生成用于控制竖向保持电机动作的输出信号;具体的,陀螺仪为三轴陀螺仪,并固设在竖向减震装置13上,角度控制器安装至竖向保持电机11的内部、并与陀螺仪、竖向保持电机11通信连接,角度控制器接收来自陀螺仪的偏移角度信号并生成用于控制竖向保持电机11动作的输出信号,由于竖向保持电机11的转矩带动把手12与竖向减震装置13相对转动,初始时刻竖向保持电机11的处于通电状态,故竖向保持电机第一端111和竖向保持电机第二端112的相对角度不变,把手12 能够带动竖向减震装置13一同摆动,当陀螺仪检测到竖向减震装置13相对竖向产生偏移角度时,角度控制器接收来自陀螺仪的偏移角度信号并驱动竖向保持电机11转动,使竖向减震装置13沿偏移方向的反方向转动,从而将竖向减震装置13定位在竖直方向上,即竖向减震装置第一端131和竖向减震装置第二端132始终在竖向上相对运动。
48.另一实施方式,为了提高竖向减震装置的稳定性和准确性,还包括用于测量竖向减震装置的第二端竖向位置的位置传感器、位置控制器和电机,其中,所述位置控制器接收
来自位置传感器的竖向位置信号并生成用于控制电机动作的输出信号,所述电机包括设有电机轴的转动端和搭载电机铁芯的固定端,所述转动端与中轴134传动连接,所述固定端与外壳133 固定连接;具体的,所述电机的电机轴与中轴134同轴固定连接或所述电机的电机轴134即为中轴,位置传感器采用带有惯性测量单元(imu)的传感器、并固定安装至竖向减震装置第二端132,位置控制器安装至电机内部,并与电机通信连接,本实施方式中,电机的转矩带动中轴134相对外壳133转动,即带动第一转动轮1351与第一条形杆1361、第二转动轮1352 与第二条形杆1362的相对运动,使竖向减震装置第二端132的负载沿震动方向的反方向运动,从而将负载定位在竖向上的确定位置,可以进一步的精确控制负载一直位于竖向上的确定位置;其中,惯性测量单元(imu)继承了上述实施方式的陀螺仪和位置传感器,能够测量物体三轴姿态角(或角速率)以及加速度的装置,imu包含了三个单轴的加速度计和三个单轴的陀螺仪,加速度计检测物体在载体坐标系统独立三轴的加速度信号(即检测竖向减震装置第二端 132的竖向位置),陀螺仪检测载体相对于导航坐标系的角速度信号(即检测竖向减震装置 13相对竖向的偏移角度)。
49.另一实施方式提供一种稳定器,如图1至图4所示,包括上述实施方式的竖向减震系统,竖向减震装置第二端132连接的云台10,该云台为三轴云台,并搭载负载;云台10与竖向减震装置第二端132的具体连接结构为:所述竖向减震装置第二端132连接有固定云台10底部电机的夹持机构17,该夹持机构17夹紧云台10底部电机的固定端,以实现云台10固定在竖向减震装置13上。在其他实施方式或实际应用中还可以采用燕尾滑槽结构、1/4螺钉与螺孔配合的机构、卡扣结构等替代。
50.又一实施方式,如图5所示,竖向减震装置13的第二端与云台10之间还设有减震球18,从而减少竖向减震装置13的震动对云台的影响,能够进一步的提高拍摄稳定性。
51.本实用新型的有益效果是:
52.本实用新型提供的一种竖向减震系统及稳定器,通过竖向保持电机11的调节(竖向保持电机11的调节可以是使用者手动调节,也可以是电机的自动调节),使得无论把手12相对竖向呈任意角度,竖向减震装置13的第一端和第二端始终保持在竖直方向上相对运动,一方面能够方便使用者握持实现低位拍摄,另一方面能够调节竖向保持电机11至把手12与竖向减震装置13呈任意角度的姿态进行拍摄,尤其是把手12位于竖向减震装置13的上方,实现提壶式姿态进行拍摄,该姿态拍摄使用者省力,能够长时间拍摄,此外,使用者不仅可以采用现有技术中握持竖向减震装置的第一端,还可以调整把手至舒适的位置进行握持。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1