电磁离合控制机构的制作方法
1.本实用新型涉及磁力驱动离合器的技术领域,特别涉及电磁离合控制机构。
背景技术:
2.离合装置顾名思义就是说利用“离”与“合”来传递适量的动力,是一种在动力源与执行器之间实现快速连接或分离的装置,即切断或实现动力源对执行器的动力传递,是把动力源的动力以开关的方式传递至执行器的装置,广泛应用于汽车、农机、机床、家电等机械设备上。
3.离合装置分为电磁离合装置、磁粉离合装置、摩擦式离合装置和液力离合装置四种。其中,电磁离合装置因其具有结构简单、动作较快、控制能量小、便于远距离控制等优点,使用范围较为广泛。
4.现有技术中应用电磁离合装置的机构,通常是一个动力源对应控制一个执行器,无法实现一个动力源对应控制多个执行器的效果,在一些特殊的应用场景中,只能通过增加动力源数量来实现控制多个执行器的目的,由此增加了设备购置成本以及导致产品体积过大。
技术实现要素:
5.为解决现有技术中,电磁离合控制机构无法实现一个动力源对应控制多个执行器的技术问题,本实用新型的技术方案如下:
6.本实用新型提供了一种电磁离合控制机构,包括转动轴、转动轮、动力输出轮、弹性件及电磁铁。
7.多个所述转动轮沿所述转动轴的轴向设置,所述转动轴可带动所述转动轮转动。动力输出轮,多个所述动力输出轮与多个所述转动轮一一对应,所述动力输出轮可与所述转动轮连接或者分离。所述动力输出轮与所述转动轮连接时,所述动力输出轮与所述转动轮通过周向固定结构同步转动。所述弹性件用于为所述动力输出轮与所述转动轮分离或者连接而提供弹性作用力。多个所述电磁铁相对于所述转动轴的轴向固定设置,所述电磁铁导通时产生磁吸力,可吸引所述动力输出轮或者所述转动轮克服所述弹性作用力,以使所述动力输出轮与所述转动轮连接或者分离。
8.本实用新型中的电磁离合控制机构,由转动轴以及在转动轴上轴向布置的多个转动轮、多个动力输出轮、多个弹性件、多个电磁铁组成,转动轴是装置的动力源,其通过外部的电机驱动,转动轴带动多个转动轮同步转动,通过电磁铁的磁吸力与弹性件的弹性作用力相互作用,可驱动转动轮相对于动力输出轮移动,或者可驱动动力输出轮相对于转动轮移动,以使转动轮和动力输出轮进行连接或者分离,由此控制动力输出轮的动力接通和断开;本实用新型中的电磁离合控制机构特别适用于一些特殊的应用场景中,例如仿生机器人、智能家居领域,可在很小的空间内串联多个离合装置,即通过一个动力源对应控制多个执行器,使用本机构而生产的产品,不仅可降低产品的体积,同时还可减少产品的制造成
本。
9.在一种可能的设计中,所述动力输出轮、所述弹性件、所述转动轮及所述电磁铁沿着所述转动轴的轴向依次布置。
10.在一种可能的设计中,所述电磁铁具有安装座,所述安装座开设安装槽、引线槽及通孔二,所述电磁铁固定于所述安装槽内,所述电磁铁的导线固定于所述引线槽内,所述转动轴活动设置于所述通孔二内。
11.在一种可能的设计中,所述安装座还开设固定孔,所述固定孔内穿设支撑杆,使多个所述安装座固定于所述支撑杆上。
12.在一种可能的设计中,所述支撑杆与所述转动轴通过支撑架连接。
13.在一种可能的设计中,所述支撑杆还套设有用于分隔所述安装座的隔离件。
14.在一种可能的设计中,所述安装座与所述转动轮之间、所述动力输出轮与所述安装座之间均设置隔离片。
15.在一种可能的设计中,所述周向固定结构包括咬合凸点及咬合槽,所述咬合凸点设置于所述转动轮及所述动力输出轮中的两者之一上,两者之另一开设所述咬合槽。
16.在一种可能的设计中,所述弹性件包括弹簧、橡胶块或者气弹簧。
17.在一种可能的设计中,所述动力输出轮的周壁设置拨动齿或者啮合齿。
附图说明
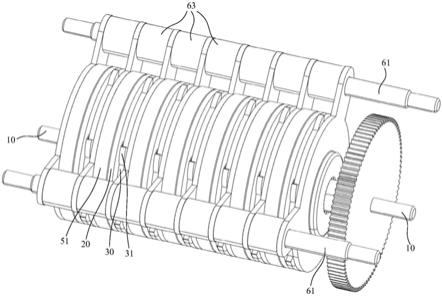
18.图1是本实用新型中,一种实施例提供的电磁离合控制机构的示意图;
19.图2是本实用新型中,一种实施例提供的单组转动轮、动力输出轮和电磁铁的装配图;
20.图3是图2的爆炸图;
21.图4是图2的另一种实施例的爆炸图;
22.图5是本实用新型中,一种实施例提供的安装座的示意图;
23.图6是本实用新型中,一种实施例提供的周向固定结构的示意图;
24.图7是本实用新型中,另一种实施例提供的电磁离合控制机构的示意图。
25.附图标记:10、转动轴;20、转动轮;30、动力输出轮;31、拨动齿;32、通孔一;40、弹性件;50、电磁铁;51、安装座;511、安装槽;512、引线槽;513、通孔二;514、固定孔;61、支撑杆;62、支撑架;63、隔离件;64、隔离片;71、咬合凸点;72、咬合槽;81、电机;82、齿轮组。
具体实施方式
26.下面将结合附图,对本实用新型中的技术方案进行描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
27.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
28.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“侧”、“内”、“外”、“顶”、
“
底”等指示的方位或位置关系为基于安装的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
29.还需说明的是,本实用新型实施例中以同一附图标记表示同一组成部分或同一零部件,对于本实用新型实施例中相同的零部件,图中可能仅以其中一个零件或部件为例标注了附图标记,应理解的是,对于其他相同的零件或部件,附图标记同样适用。
30.以下,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。
31.如图1
‑
4所示,本实施例中的电磁离合控制机构,包括转动轴10、转动轮20、动力输出轮30、弹性件40及电磁铁50。转动轴10是装置的动力源,可以驱动多个转动轮20和动力输出轮30转动,电磁铁50能够快速实现转动轴10与动力输出轮30的连接或分离,以使转动轴10的动力被接通或断开。
32.本实施例中的电磁离合控制机构,其具体结构为:多个转动轮20沿转动轴10的轴向设置,转动轴10可带动转动轮20转动。多个动力输出轮30与多个转动轮20一一对应,动力输出轮30可与转动轮20连接或者分离。动力输出轮30与转动轮20连接时,动力输出轮30与转动轮20通过周向固定结构同步转动。弹性件40用于为动力输出轮30与转动轮20分离或者连接而提供弹性作用力。多个电磁铁50相对于转动轴10的轴向固定设置,电磁铁50导通时产生磁吸力,可吸引动力输出轮30或者转动轮20克服弹性作用力,以使动力输出轮30与转动轮20连接或者分离。
33.如图3所示,在一种实施例中,动力输出轮30、弹性件40、转动轮20及电磁铁50沿着转动轴10的轴向依次布置。
34.在本实施例中,转动轴10可通过电机81驱动,是装置的动力源,沿转动轴10的轴向设置多个转动轮20,并且转动轮20相对于转动轴10的轴向固定设置,也就是说,在本实施例中转动轮20不能在转动轴10上滑动。转动轮20与转动轴10可以通过焊接、粘接、铆接等固定方式连接,以使转动轴10可以带动转动轮20转动;也可以是,转动轮20的中部开设多边形槽或键槽,转动轴10设置相应的多边形体或键,转动轮20通过多边形槽套接于转动轴10的多边形体上,或者,转动轮20通过键槽套接于转动轴10的键上,进而使转动轴10与转动轮20周向固定,以使转动轴10可以带动转动轮20转动。
35.在本实施例中,动力输出轮30开设通孔一32,通孔一32的孔径略大于转动轴10的外径,多个动力输出轮30通过通孔一32活动套设于转动轴10上,并且多个动力输出轮30与多个转动轮20一一对应,由此,动力输出轮30可沿着转动轴10的轴向活动,以靠近或者远离相对应的转动轮20。动力输出轮30与转动轮20之间设置弹性件40,弹性件40用于为动力输出轮30与转动轮20分离而提供弹性作用力。动力输出轮30与转动轮20均设置有可互相配合连接的轴向固定结构,在电磁铁50的吸引下,动力输出轮30克服弹性作用力与转动轮20进行连接,动力输出轮30与转动轮20通过周向固定结构可同步转动。
36.在本实施例中,多个电磁铁50相对于转动轴10的轴向固定设置,可以通过固定架将电磁铁50及转动轴10连接,以使电磁铁50与转动轴10无法相对活动,并且多个电磁铁50与多个动力输出轮30一一对应,电磁铁50导通时,可吸引动力输出轮30克服弹性作用力,以
使动力输出轮30与转动轮20连接,从而通过电磁铁50控制动力输出轮30的动力接通和断开。
37.本实施例的工作过程为:状态一,当电磁铁50通电而产生磁力,动力输出轮30受到磁力吸引往右运动并压缩弹性件40,动力输出轮30与转动轮20贴合连接且周向固定,使动力输出轮30跟随转动轮20一起旋转,动力输出轮30向外输出动力;状态二,当电磁铁50断电而磁力消失,动力输出轮30受到弹性件40的弹性作用力往左移动,动力输出轮30与转动轮20分离,转动轮20继续旋转,动力输出轮30静止从而中断动力。
38.如图4所示,在一种实施例中,动力输出轮30、转动轮20、弹性件40及电磁铁50沿着转动轴10的轴向依次布置。
39.在本实施例中,转动轴10可通过电机81驱动,是装置的动力源,沿转动轴10的轴向设置多个转动轮20,并且转动轮20相对于转动轴10的轴向活动设置,也就是说,在本实施例中转动轮20可在转动轴10上滑动,以靠近或者远离相对应的动力输出轮30。转动轮20的中部开设多边形槽或键槽,转动轴10设置相应的多边形体或键,转动轮20通过多边形槽滑动套接于转动轴10的多边形体上,或者,转动轮20通过键槽滑动套接于转动轴10的键上,进而使转动轴10与转动轮20周向固定,以使转动轴10可以带动转动轮20转动。
40.在本实施例中,动力输出轮30开设通孔一32,通孔一32的孔径略大于转动轴10的外径,多个动力输出轮30通过通孔一32套设于转动轴10上,并且多个动力输出轮30相对于转动轴10的轴向固定设置,也就是说,在本实施例中动力输出轮30不能在转动轴10的轴向活动。
41.在本实施例中,弹性件40被压缩设置于转动轮20与电磁铁50之间,弹性件40用于为转动轮20向动力输出轮30贴靠连接而提供弹性作用力。动力输出轮30与转动轮20均设置有可互相配合连接的轴向固定结构,在弹性件40的弹性作用力下,转动轮20与动力输出轮30进行连接,动力输出轮30与转动轮20通过周向固定结构可同步转动。
42.在本实施例中,多个电磁铁50相对于转动轴10的轴向固定设置,可以通过固定架将电磁铁50及转动轴10连接,以使电磁铁50与转动轴10无法相对活动,并且多个电磁铁50与多个转动轮20一一对应,电磁铁50导通时,可吸引转动轮20克服弹性作用力,以使转动轮20与动力输出轮30分离,从而通过电磁铁50控制动力输出轮30的动力接通和断开。
43.本实施例的工作过程为:状态一,当电磁铁50通电而产生磁力,转动轮20受到磁力吸引往右运动并压缩弹性件40,转动轮20与动力输出轮30分离,转动轮20继续旋转,动力输出轮30静止从而中断动力;状态二,当电磁铁50断电而磁力消失,转动轮20受到弹性件40的弹性作用力往左移动,转动轮20与动力输出轮30贴合连接且周向固定,使动力输出轮30跟随转动轮20一起旋转,动力输出轮30向外输出动力。
44.本实用新型中的电磁离合控制机构,由转动轴10以及在转动轴10上轴向布置的多个转动轮20、多个动力输出轮30、多个弹性件40、多个电磁铁50组成,转动轴10是装置的动力源,其通过外部的电机81驱动,转动轴10带动多个转动轮20同步转动,通过电磁铁50的磁吸力与弹性件40的弹性作用力相互作用,可驱动转动轮20相对于动力输出轮30移动,或者可驱动动力输出轮30相对于转动轮20移动,以使转动轮20和动力输出轮30进行连接或者分离,由此控制动力输出轮30的动力接通和断开;本实用新型中的电磁离合控制机构特别适用于一些特殊的应用场景中,例如仿生机器人、智能家居领域,可在很小的空间内串联多个
离合装置,即通过一个动力源对应控制多个执行器,使用本机构而生产的产品,不仅可降低产品的体积,同时还可减少产品的制造成本。
45.需要特别说明的是,动力输出轮30还要与外界的动力臂、齿条等机构进行连接,以将动力输出轮30的转动能输出为摆动、直线运动等其他形式的机械能。由于动力输出轮30还与外界的动力臂、齿条进行连接,相应的,动力臂与齿条还可对动力输出轮30进行支撑,以防止动力输出轮30的通孔一32的孔壁与转动轴10的外壁相接触。如果动力输出轮30不被外界的动力臂、齿条支撑,动力输出轮30会受重力作用令通孔一32的孔壁与转动轴10接触,由此转动轴10会带动动力输出轮30抖动。
46.如图5所示,在一种实施例中,电磁铁50具有安装座51,安装座51开设安装槽511、引线槽512及通孔二513,电磁铁50固定于安装槽511内,电磁铁50的导线固定于引线槽512内,转动轴10活动设置于通孔二513内。
47.为了更好的固定电磁铁50,本实施例中的电磁离合控制机构还包括安装座51,安装座51开设有安装槽511、引线槽512及通孔二513,电磁铁50卡固在安装槽511内,电磁铁50的导线卡固在引线槽512内,电磁铁50的导线与外部的供电电路接通。
48.在本实施例中,每个转动轮20和动力输出轮30所对应的电磁铁50是一个大的环状结构,也可以是,每个转动轮20和动力输出轮30所对应的是电磁铁50组,电磁铁50组由多个小的环状电磁铁50构成。
49.如图1、5所示,在一种实施例中,安装座51还开设固定孔514,固定孔514内穿设支撑杆61,使多个安装座51固定于支撑杆61上。
50.电磁铁50可以通过安装座51单独地固定在转动轮20和动力输出轮30附近,也可以通过一个串联件将多个电磁铁50进行统一装配,以便于安装。因此,为了便于将多个电磁铁50进行统一装配,在安装座51上开设两个对称设置的固定孔514,每个固定孔514内穿设支撑杆61,由此,通过两个支撑杆61便将多个安装座51和电磁铁50进行统一装配,可以降低产品组装时的工作量。
51.如图7所示,在一种实施例中,支撑杆61与转动轴10通过支撑架62连接。
52.如前所述,多个电磁铁50相对于转动轴10的轴向固定设置,即电磁铁50不能沿着转动轴10的轴向移动。为了实现该效果,在本实施例中,可以通过支撑架62将支撑杆61和转动轴10进行连接,具体的,支撑架62与支撑杆61固定连接,支撑架62与转动轴10转动连接,支撑杆61相对于转动轴10的轴向固定,进而使安装座51和电磁铁50相对于转动轴10的轴向固定。
53.如图1所示,在一种实施例中,支撑杆61还套设有用于分隔安装座51的隔离件63。
54.在上述实施例中,安装座51固定于支撑杆61上,可以通过焊接、粘接的方式直接将安装座51与支撑杆61固定连接,还可以通过本实施例中所述的方式,即支撑杆61上均匀排布多个隔离件63,相邻两个隔离件63之间的间距与固定孔514处的安装座51基体厚度相应,使得相邻两个隔离件63将安装座51夹固在支撑杆61上。
55.如图3、4所示,在一种实施例中,安装座51与转动轮20之间、动力输出轮30与安装座51之间均设置隔离片64。
56.为了避免转动轮20、动力输出轮30在转动时对安装座51进行摩擦,在安装座51与转动轮20之间、动力输出轮30与安装座51之间均设置隔离片64,以将安装座51与转动轮20、
动力输出轮30与安装座51分隔开。
57.如图6所示,在一种实施例中,周向固定结构包括咬合凸点71及咬合槽72,咬合凸点71设置于转动轮20及动力输出轮30中的两者之一上,两者之另一开设咬合槽72。
58.在本实施例中,多个咬合凸点71沿着转动轮20的周向分布,多个咬合槽72沿着动力输出轮30的周向开设,并且咬合槽72的数目是咬合凸点71的数目的整数倍。动力输出轮30向转动轮20贴靠连接时,咬合槽72与咬合凸点71咬合,进而使动力输出轮30与转动轮20周向固定连接,可以同步转动。
59.在另一种实施例中,咬合凸点71及咬合槽72还可以互换设置基体,多个咬合凸点71沿着动力输出轮30的周向分布,多个咬合槽72沿着转动轮20的周向开设,并且咬合槽72的数目是咬合凸点71的数目的整数倍。
60.在一种实施例中,弹性件40包括弹簧、橡胶块或者气弹簧。
61.如图3、4所示,本实施例中的弹簧是压缩弹簧(压簧),是承受轴向压力的螺旋弹簧,形状为圆柱形,压缩弹簧的圈与圈之间有一定的间隙,当受到外载荷时弹簧收缩变形,储存变形能。
62.本实施例中橡胶块的形状为管状结构,套设在转动轴10的外部,也用于承受轴向压力。
63.本实施例中的气弹簧是一种可以起支撑、缓冲、制动、高度调节及角度调节等功能的工业配件。它由以下几部分构成:压力缸、活塞杆、活塞、密封导向套、填充物(惰性气体或者油气混合物)等。原理是在密闭的压力缸内充入惰性气体或者油气混合物,使腔体内的压力高于大气压的几倍或者几十倍,利用活塞杆的横截面积小于活塞的横截面积从而产生的压力差来实现活塞杆的运动。
64.如图1、2所示,在一种实施例中,动力输出轮30的周壁设置拨动齿31或者啮合齿,以用于与外界的动力臂、齿条等机构进行连接,以将动力输出轮30的转动能输出为直线运动、摆动等其他形式的机械能。
65.本实用新型中的电磁离合控制机构,可以用于以下产品中:
66.一是可用于一个动力输入产生多个动力可控输出的产品中,例如仿生机器人领域中的多足机器人。动力输出轮30的周壁设置拨动齿31,拨动齿31带动动力臂,动力臂再带动一只腿。即可实现多足爬行机器人控制。再比如仿生鱼,一组五个动力输出轮30,同时连接一个鳍型部件,通过控制多个电磁铁50成周期输出动力,使鳍形成波浪状动作,进而实现推进。
67.二是可用于智能家居领域。随着人们生活水平的提高,消费者对家具产品的自动化/智能化的要求越来越高,针对这种情况,现有一些高档家具(比如书桌、衣柜等)配备了自动推出/收回抽屉的功能,如果具有多个抽屉,需要给每个抽屉配置驱动装置。采用本机构可在较小的安装空间内实现该功能。比如,动力输出轮30的周壁设置啮合齿,在抽屉滑轨上增设齿条,转动轴10被电机81驱动时可使转动轮20和动力输出轮30同步转动,以驱动抽屉滑轨前后运动,实现抽屉的自动推出/缩回,并且,电磁铁50可以控制动力输出轮30的动力接通情况,进而对多个抽屉的开合情况进行控制。
68.如图7所示,在一种实施例中,电磁离合控制机构还包括:电机81,电机81的输出轴通过齿轮组82与转动轴10连接。电机81和齿轮组82也通过支撑架62固定。
69.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1