一种地下管道环境质量检测机器人的制作方法
1.本实用新型涉及管道环境检测技术领域,尤其涉及一种地下管道环境质量检测机器人。
背景技术:
2.地下管道是敷设在地下用于输送液体、气体或松散固体的管道。中国古代早已采用陶土烧制的地下排水管道,明朝建都北京,大量采用砖和条石砌筑地下排水管道。宽达1米左右,高达2米左右。现代的地下管道种类繁多,有圆形、椭圆形、半椭圆形、多圆心形、卵形、矩形(单孔、双孔和多孔)、马蹄形等各种断面形式,采用钢、铸铁、混凝土、钢筋混凝土、预应力混凝土、砖、石、石棉水泥、陶土、塑料、玻璃钢(增强塑料)等材料建造。
3.在需要对地下管道内部环境进行检测时,通常使用轨道式巡航检测机器人,但是由于管道内部环境恶劣,轨道上易残留杂物灰尘等,对于轨道式巡航检测机器人移动造成影响,并且在对管道较深处进行检测时,检测端易覆盖阻挡物以及灰尘等杂质,大幅度的影响对管道内部环境检测精度。
4.因此,需要一种地下管道环境质量检测机器人,用以解决对轨道式巡航检测机器人检测端易覆盖灰尘杂质影响检测精度的问题。
技术实现要素:
5.本实用新型提出的一种地下管道环境质量检测机器人,解决了对轨道式巡航检测机器人检测端易覆盖灰尘杂质影响检测精度的问题。
6.为了实现上述目的,本实用新型采用了如下技术方案:一种地下管道环境质量检测机器人,包括两个呈对称分布的滑轨以及两个所述滑轨之间滑动连接的基体,所述基体还包括
7.齿形板,所述齿形板设置有两个,两个所述齿形板固定于所述滑轨一侧侧壁,所述滑轨内部滑动连接有多个呈对称分布的安装框,其中两个所述安装框内部转动连接有传动轴a,所述传动轴a外表面紧固套接有两个呈对称分布的直齿轮a,所述直齿轮a与所述齿形板啮合连接,所述传动轴a位于基体内部的外表面设置有相配合的传动组件;
8.环境检测器,所述环境检测器固定于所述基体外侧侧壁,所述环境检测器外侧侧壁滑动连接有刮板,所述刮板与所述环境检测器外表面相贴合,所述刮板一侧侧壁设置有相配合的除尘组件。
9.优选的,所述传动组件包括
10.伺服电机,所述伺服电机固定于所述基体外侧侧壁,所述伺服电机的输出轴通过联轴器固定有主动轴,所述主动轴外表面紧固套接有蜗轮,所述主动轴与所述传动轴a相邻的一端固定有相互啮合连接的锥齿轮组,所述传动轴a外表面紧固套接有传动齿轮a;
11.安装套,所述安装套设置有两个,两个所述安装套均固定于所述基体外侧侧壁,所述安装套内部转动连接有传动轴b,所述传动轴b一端固定有传动齿轮b,所述传动齿轮b与
所述传动齿轮a啮合连接,所述传动轴b远离传动齿轮b的一端固定有扇叶。
12.优选的,所述除尘组件包括
13.传动轴c,所述传动轴c与所述基体内侧侧壁转动连接,所述传动轴c外表面紧固套接有蜗杆,所述蜗杆与所述蜗轮啮合连接,所述传动轴c一端固定有转轮,所述转轮与所述刮板之间铰接有连接杆。
14.优选的,所述环境检测器外侧侧壁开设有两个呈对称分布的滑槽,所述刮板与所述滑槽内部滑动连接。
15.优选的,其中两个所述安装框截面呈u形,两个所述安装框内部与所述滑轨外表面滑动连接。
16.优选的,所述伺服电机外表面紧固套接有防护框,所述防护框与所述基体外侧侧壁固定。
17.与现有技术相比,本实用新型的有益效果是:
18.1、本实用新型中通过板在滑槽内部往复移动,配合刮板与滑槽滑动连接,既能够起到对刮板移动过程中的导向作用,又能够避免刮板出现位置偏移的情况,能够对环境检测器表面的灰尘进行清理,大幅度的提升环境检测器对空气质量检测的精度,有效避免灰尘或者尘土覆盖的因素造成检测精度低的情况。
19.2、本实用新型中通过锥齿轮组啮合传动作用,使得传动轴a同步转动,带动直齿轮a同步转动,通过直齿轮a与齿形板啮合传动作用,使得基体在滑轨内部移动,配合安装框与滑轨滑动连接,既能够起到基体移动过程中导向作用,又能够避免出现基体脱落的情况。
附图说明
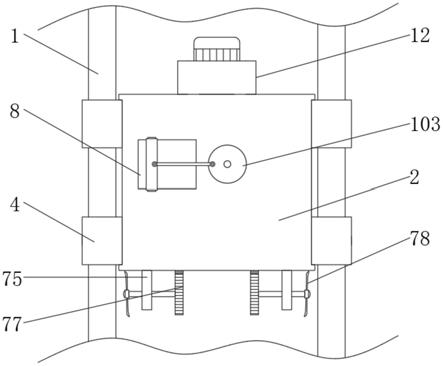
20.图1为本实用新型提出的一种地下管道环境质量检测机器人的俯视结构示意图;
21.图2为本实用新型提出的一种地下管道环境质量检测机器人的俯剖结构示意图;
22.图3为图2中a区域放大图;
23.图4为本实用新型提出的一种地下管道环境质量检测机器人的主剖局部结构示意图。
24.图中:1、滑轨;2、基体;3、齿形板;4、安装框;5、传动轴a;6、直齿轮a;7、传动组件;71、伺服电机;72、主动轴;73、锥齿轮组;74、传动齿轮a;75、安装套;76、传动轴b;77、传动齿轮b;78、扇叶;79、蜗轮;8、环境检测器;9、刮板;10、除尘组件;101、传动轴c;102、蜗杆;103、转轮;104、连接杆;11、滑槽;12、防护框。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
26.参照图1
‑
4,一种地下管道环境质量检测机器人,包括两个呈对称分布的滑轨1以及两个滑轨1之间滑动连接的基体2,基体2还包括齿形板3,齿形板3设置有两个,两个齿形板3固定于滑轨1一侧侧壁,滑轨1内部滑动连接有多个呈对称分布的安装框4,其中两个安装框4内部转动连接有传动轴a5,传动轴a5外表面紧固套接有两个呈对称分布的直齿轮a6,
直齿轮a6与齿形板3啮合连接,传动轴a5位于基体2内部的外表面设置有相配合的传动组件7。
27.其中传动组件7包括伺服电机71,伺服电机71固定于基体2外侧侧壁,伺服电机71的输出轴通过联轴器固定有主动轴72,主动轴72外表面紧固套接有蜗轮79,主动轴72与传动轴a5相邻的一端固定有相互啮合连接的锥齿轮组73,传动轴a5外表面紧固套接有传动齿轮a74;安装套75,安装套75设置有两个,两个安装套75均固定于基体2外侧侧壁,安装套75内部转动连接有传动轴b76,传动轴b76一端固定有传动齿轮b77,传动齿轮b77与传动齿轮a74啮合连接,传动轴b76远离传动齿轮b77的一端固定有扇叶78,具体的,通过扇叶78转动产生的风力,能够对滑轨1上的灰尘以及残渣吹落,避免基体2在移动过程中出现卡壳以及不稳定的情况。
28.环境检测器8,环境检测器8固定于基体2外侧侧壁,环境检测器8外侧侧壁滑动连接有刮板9,刮板9与环境检测器8外表面相贴合,刮板9一侧侧壁设置有相配合的除尘组件10。
29.其中除尘组件10包括传动轴c101,传动轴c101与基体2内侧侧壁转动连接,传动轴c101外表面紧固套接有蜗杆102,蜗杆102与蜗轮79啮合连接,传动轴c101一端固定有转轮103,转轮103与刮板9之间铰接有连接杆104,具体的,通过刮板9在环境检测器8外表面的灰尘进行清理,有效避免因灰尘覆盖造成环境检测器8检测精度减低的情况,大幅度的提升了环境检测器8对环境检测质量。
30.环境检测器8外侧侧壁开设有两个呈对称分布的滑槽11,刮板9与滑槽11内部滑动连接,具体的,通过刮板9与滑槽11滑动连接,既能够起到对刮板9移动中的导向作用,又能够避免刮板9在移动过程中出现掉落的情况,其中两个安装框4截面呈u形,两个安装框4内部与滑轨1外表面滑动连接,伺服电机71外表面紧固套接有防护框12,防护框12与基体2外侧侧壁固定,具体的,通过防护框12与伺服电机71固定,能够起到一定程度上对伺服电机71起到保护作用,又能够对有效的避免伺服电机71脱落造成损坏的情况。
31.工作原理:通过伺服电机71的驱动,使得主动轴72同步转动,通过锥齿轮组73啮合传动作用,使得传动轴a5同步转动,带动直齿轮a6同步转动,通过直齿轮a6与齿形板3啮合传动作用,使得基体2在滑轨1内部移动,配合安装框4与滑轨1滑动连接,既能够起到基体2移动过程中导向作用,又能够避免出现基体2脱落的情况,通过传动齿轮a74与传动齿轮b77之间的啮合传动作用,使得传动轴b76同步转动,带动扇叶78同步转动,通过扇叶78转动过程中所产生的风力,能够对滑轨1外表面上的灰尘以及残屑脱落,进一步的保证基体2移动过程中的稳定性,通过蜗轮79与蜗杆102之间的啮合传动作用,使得传动轴c101同步转动,带动转轮103同步转动,通过连接杆104的传动作用,使得刮板9在滑槽11内部往复移动,配合刮板9与滑槽11滑动连接,既能够起到对刮板9移动过程中的导向作用,又能够避免刮板9出现位置偏移的情况,能够对环境检测器8表面的灰尘进行清理,大幅度的提升环境检测器8对空气质量检测的精度,有效避免灰尘或者尘土覆盖的因素造成检测精度低的情况。
32.伺服电机71可采用市场购置,伺服电机71配有电源,在本领域属于成熟技术,已充分公开,因此说明书中不重复赘述。
33.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用
新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1