一种管道修理机器人防滑行走机构
1.本实用新型涉及机器人配件技术领域,具体为一种管道修理机器人防滑行走机构。
背景技术:
2.我国地下管网存在雨污合排、老管道多的特点。国家指出,城市道路病害、城市内涝、城市黑臭水体治理、城市双修等以国家层面提出的城市公共服务对地下管线,集中力量加快灾后水利薄弱环节和涝灾严重城市排水防涝能力建设,是补上民生短板、保护生态的重要举措。管线服务已从管线探测保障城市的规划、建设、管理,进化到以安全、生态、环保、绿色、发展等为主题的城市治理。
3.机器人是科技发展的一个重要结晶,同时它也取代了很多很多的职业岗位,如运用到医学当中的手术机器人、运用到农田里的采摘机器人等等,其中管道涉及的范围非常广泛,无论是石油管道、天然气管道还是用户家中的下水管道都包含在机器人的工作范围内。
4.现有的大多数管道又细又长,修理者只能从外面进行修复,但是一些问题出在里面,修理者很难察觉,管道中存在对人体有害废水和空气,对人员的工作安全造成威胁,通过人工下管道检修,不仅效率低下,且因杂质或者管体焊接节点而出现滑动情况,缺少及时发现配合行走的结构。
技术实现要素:
5.本实用新型的目的在于提供一种管道修理机器人防滑行走机构,以解决上述背景技术中提出的现有的大多数管道又细又长,修理者只能从外面进行修复,但是一些问题出在里面,修理者很难察觉,管道中存在对人体有害废水和空气,对人员的工作安全造成威胁,通过人工下管道检修,不仅效率低下,且因杂质或者管体焊接节点而出现滑动情况,缺少及时发现配合行走的结构的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种管道修理机器人防滑行走机构,包括底架、控制器和顶架,所述底架的顶部通过螺丝固定连接所述控制器,所述底架的顶部通过螺栓固定连接有升降器,所述底架的底部通过螺丝固定连接有驱动器,所述底架的底部通过轴杆套接有驱动轮和辅助轮,所述底架的顶部通过螺丝固定连接有图像处理器,所述底架的侧壁通过螺丝固定连接有摄像机和灯具,所述控制器的电性输出端电性连接所述驱动器、所述图像处理器、所述摄像机、所述灯具和所述升降器,所述升降器的顶部插接有升降轴,所述升降轴的顶部通过螺丝与顶架的底部固定连接,所述顶架的顶部开设有凹槽,凹槽的数量为两个,两个所述凹槽的内部套接有主顶轮和副顶轮,所述主顶轮的侧壁插接有主拆卸架,所述主拆卸架的侧壁卡扣连接有弹簧柱,所述弹簧柱的侧壁卡扣连接有副拆卸架,所述副拆卸架的侧壁插接所述副顶轮。
7.优选的,所述驱动轮和所述辅助轮的圆周外壁套接有防滑橡胶套。
8.优选的,所述控制器的内腔底部通过螺丝固定连接有相互电性串联的无线传输器、变频控制器和蓄电池。
9.优选的,所述底架的顶部通过螺丝固定连接有辅助轴,所述辅助轴的顶部通过螺丝固定连接所述顶架。
10.优选的,所述主顶轮的安装位置和所述副顶轮的安装位置在同一水平线上。
11.优选的,所述主拆卸架的侧壁螺纹连接有拆卸螺栓,所述副拆卸架的整体结构与所述主拆卸架的整体结构相同。
12.与现有技术相比,本实用新型的有益效果是:该种管道修理机器人防滑行走机构,通过配件的组合运用,在底架下方设置由驱动器连接的驱动轮,底架前方设置携带灯具的摄像机和图像处理器,可对管道的内部环境进行获取观察,便于配合行走,且配合升降器和辅助轴连接顶架,顶架的内部通过弹簧柱连接主拆卸架和副拆卸架,且在两个架体上分别组合顶轮,可在图像处理器明确前方出现不规则杂质时,配合控制器进行顶架提升,使顶轮在管壁的顶部接触,配合行走,提升防滑能力,在面对移动时的颠簸和遇管道焊接节点时,弹簧柱可有效配合顶轮进行轻微的震动调整,降低震动对行走机构的影响。
附图说明
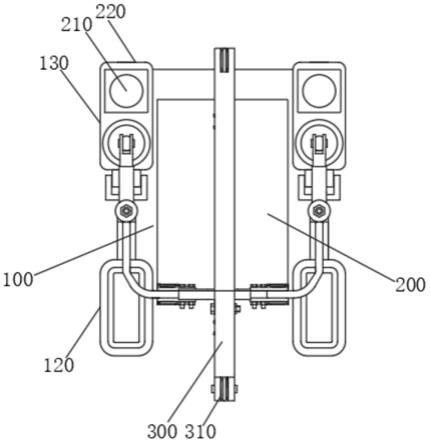
13.图1为本实用新型整体结构俯视示意图;
14.图2为本实用新型整体结构侧面示意图;
15.图3为本实用新型顶架内部示意图。
16.图中:100底架、110驱动器、120驱动轮、130辅助轮、200控制器、210图像处理器、220摄像机、230升降器、240升降轴、250辅助轴、300顶架、310主顶轮、320主拆卸架、330拆卸螺栓、340弹簧柱、350副拆卸架、360副顶轮。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.本实用新型提供一种管道修理机器人防滑行走机构,通过配件的组合运用,携带灯具的摄像机和图像处理器,可对管道的内部环境进行获取观察,便于配合行走,且配合升降器和辅助轴连接顶架,顶架的内部通过弹簧柱连接主拆卸架和副拆卸架,且在两个架体上分别组合顶轮,可在图像处理器明确前方出现不规则杂质时,配合控制器进行顶架提升,使顶轮在管壁的顶部接触,配合行走,提升防滑能力,在面对移动时的颠簸和遇管道焊接节点时,弹簧柱可有效配合顶轮进行轻微的震动调整,降低震动对行走机构的影响,请参阅图1、图2和图3,包括底架100、控制器200和顶架300;
19.请再次参阅图1,底架100的底部具有驱动器110,具体的,底架100的底部通过螺丝固定连接有驱动器110,底架100的底部通过轴杆套接有驱动轮120和辅助轮130,辅助轮130的大小与驱动轮120的大小相同,在一些实施例中,可通过增减辅助轮130的数量,提升移动的配合效果;
20.请再次参阅图1和图2,控制器200与底架100连接,具体的,底架100的顶部通过螺丝固定连接控制器200,底架100的顶部通过螺栓固定连接有升降器230,底架100的顶部通过螺丝固定连接有图像处理器210,底架100的侧壁通过螺丝固定连接有摄像机220和灯具,控制器200的电性输出端电性连接驱动器、图像处理器210、摄像机220、灯具和升降器230,升降器230的顶部插接有升降轴240,升降轴240的顶部通过螺丝与底架100的底部固定连接,图像处理器210伴随着图像处理技术的进一步发展,管道机器人的检测能力也在进一步提高,图像处理器210具备图像处理技术的拓展应用使得管道机器人拥有更多功能,管道内部的缺陷可以通过对视频的图像处理,获得其长度、宽度、深度、面积等具体的物理尺寸,而且在机器人行进中,图像信息的处理可以为机器人的行进进行导航,通过图像处理技术,机器人可以快速识别前方障碍、淤泥等,并规划出准确的躲避路线;
21.请再次参阅图2和图3,顶架300的底部与升降轴240连接,具体的,升降器230的顶部具有顶架300,顶架300的顶部开设有凹槽,凹槽的数量为两个,两个凹槽的内部套接有主顶轮310和副顶轮360,主顶轮310的侧壁插接有主拆卸架320,主拆卸架320的侧壁卡扣连接有弹簧柱340,弹簧柱340的侧壁卡扣连接有副拆卸架350,副拆卸架350的侧壁插接副顶轮360;
22.在具体的使用时,首先在底架100的底部设置驱动轮120和辅助轮130,依靠驱动器110来组合驱动轮120,驱动轮120可进行驱动前进,在底架100的前方设置有携带灯具的摄像机220,并在底架100的顶部设置图像处理器210,当遇到杂物时,可通过控制器200来控制升降器230开启,升降器230配合升降轴240对顶架300位置顶起,顶架300上具有主顶轮310和副顶轮360,可对管壁顶部进行接触,在面对管壁的焊接节点时,也可配合弹簧柱340进行主顶轮310和副顶轮360的轻微调整,保证稳定防滑。
23.请再次参阅图1,为了便于提升整体的防滑效果,具体的,驱动轮120和辅助轮130的圆周外壁套接有防滑橡胶套。
24.请再次参阅图2,为了进行远程数据的传输和供能,具体的,控制器200的内腔底部通过螺丝固定连接有相互电性串联的无线传输器、变频控制器和蓄电池,其中无线传输器、变频控制器和蓄电池的型号可直接选用市面常用型号,无线传输器包括但不仅限于wifi、蓝牙、物联网和5g,变频控制器的内部含有可编辑型芯片,芯片可进行阈值的预先编辑。
25.请再次参阅图2和图3,为了增加顶架300支撑中的配合性,并使使用过程保持稳定,具体的,底架100的顶部通过螺丝固定连接有辅助轴250,辅助轴250的顶部通过螺丝固定连接顶架300,主顶轮310的安装位置和副顶轮360的安装位置在同一水平线上。
26.请再次参阅图3,为了便于对主拆卸架320和拆卸螺栓330进行灵活性拆卸,方便后期维修整修或配合多种长度规格的弹簧柱340进行调换,具体的,主拆卸架320的侧壁螺纹连接有拆卸螺栓330,副拆卸架350的整体结构与主拆卸架320的整体结构相同。
27.虽然在上文中已经参考实施例对本实用新型进行了描述,然而在不脱离本实用新型的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本实用新型所披露的实施例中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本实用新型并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1