一种便于拓展的微型管道机器人的驱动装置的制作方法
一种便于拓展的微型管道机器人的驱动装置
【技术领域】
1.本实用新型涉及管道机器人技术领域,特别涉及一种便于拓展的微型管道机器人的驱动装置。
背景技术:
2.管道作为一种重要的物料输送设施,其在各行各业都得到了广泛的应用。为了保证管道的使用安全,在管道制造和使用的过程中都难以避免需要对管道的内部进行作业,如探伤、清洁、检测等。
3.管道机器人是特种机器人的重要分支之一,该类机器人在管道所属的特定空间内工作,能够携带各种检测仪器或者作业装置,在操作人员的遥控或者自主控制之下进入至管道内部,能够完成诸如管道探伤、防腐涂层检测、涂覆识别、管内异物识别、管内清洁、管内加工等多种任务;通过采用管道机器人进行管内作用,能够大幅提高管道作业的精准性和可靠性,并且提高工作效率。但是,现有的管道机器人无法适应100mm以下管径的小管径管道,这给实际的使用带来了诸多限制;另外,现有的管道机器人也难以通过90
°
的长半径弯头。有鉴于此,本发明人针对现有技术中的上述缺陷深入研究,遂有本案产生。
技术实现要素:
4.本实用新型要解决的技术问题,在于提供一种便于拓展的微型管道机器人的驱动装置,能够适应小管径管道。
5.本实用新型是这样实现的:一种便于拓展的微型管道机器人的驱动装置,包括总支架、设于所述总支架的两端用于实现径向伸缩的弹性支撑结构、安装于所述弹性支撑结构上用于支撑在管道内壁上的支撑轮、铰接于所述总支架的中部用于实现径向摆动的摇摆机构、设置在所述摇摆机构上的驱动轮以及驱使所述驱动轮沿着管道的内壁前进或者后退的驱动机构。
6.进一步的,所述摇摆机构包括摇摆臂、连杆、弹簧压片以及驱动轮弹簧;所述总支架上形成有支撑凸部,所述摇摆臂的一端通过支撑凸部连接销与所述支撑凸部铰接;所述驱动轮与所述摇摆臂的另一端转动连接,且所述驱动轮与靠近该驱动轮的弹性支撑结构之间形成有驱动轮摆动活动空间;
7.所述总支架上对应于所述摇摆臂的中部位置形成有弹簧装配腔室,所述驱动轮弹簧和弹簧压片均设于所述弹簧装配腔室内,且所述驱动轮弹簧的端部抵顶于所述弹簧压片上;所述摇摆臂的中部通过连杆连接销与所述连杆的一端铰接,所述连杆的另一端通过弹簧压片限位销与所述弹簧压片铰接;所述总支架上对应于所述弹簧压片限位销的两端开设有压缩限位槽。
8.进一步的,所述总支架的中部设有两个所述摇摆机构,两个所述摇摆机构之间的夹角为180
°
;所述驱动轮弹簧的一端抵顶于一所述摇摆机构的弹簧压片上,所述驱动轮弹簧的另一端抵顶于另一所述摇摆机构的弹簧压片上。
9.进一步的,所述驱动机构为固定在摇摆臂上的驱动电机。
10.进一步的,所述弹性支撑结构包括安装底座、支撑架以及支撑轮弹簧;
11.所述安装底座固定在总支架上,且所述安装底座上形成有支撑架装配槽;所述支撑架可上下活动地设置在所述支撑架装配槽内,所述支撑轮转动设置在所述支撑架上;所述支撑轮弹簧设置在所述安装底座的内底部与支撑架的外底部之间,所述支撑架的底部具有插入至所述支撑轮弹簧内的延伸柱;所述支撑架装配槽的上端设置有用于对所述支撑架进行限位的限位结构。
12.进一步的,所述总支架的两端各设置有三个所述弹性支撑结构,且三个所述弹性支撑结构围绕所述总支架的端部等间距均匀分布设置。
13.进一步的,在驱动装置作为中间节时,所述总支架的前后两端均设置有万向节接头。
14.进一步的,在驱动装置作为最后一节时,所述总支架的前端设置有万向节接头,所述总支架的后端设置有安全绳安装口和电气总接头。
15.进一步的,在驱动装置作为第一节时,所述总支架的前端设置有摄像装置,所述总支架的后端设置有万向节接头。
16.通过采用本实用新型的技术方案,至少具有如下有益效果:
17.1、通过将支撑轮设置在能够实现径向伸缩的弹性支撑结构上,同时将驱动轮设置在能够实现径向摆动的摇摆机构上,使得具体工作时,在驱动机构驱使整个驱动装置沿着管道的内壁前进或者后退的过程中,支撑轮和驱动轮都能够跟随管道管径的变化而变化,即当管道的管径变小时,支撑轮和驱动轮能够被压缩;而当管道的管径变大时,支撑轮和驱动轮能够向外张开,因此该驱动装置能够自适应管道的管径变化,实现管道内部的越障功能,并且采用该驱动装置的结构设计能够很好的适应70-80mm的小管径管道,使用范围更加广泛。
18.2、通过在总支架的前端和/或后端设置万向节接头,在使用时可方便通过万向节接头进行功能拓展,包括可以根据实际使用需要增减驱动装置的数量,以更好地满足管道机器人的动力需求;可以根据实际需要在驱动装置的前端或者后端组装不同的工作节,以组成具有多种功能的管道机器人。
19.3、本实用新型中摇摆机构和弹性支撑结构设计,使得支撑轮和驱动轮能够很好地适应管道的管径变化,并且能够保证整个驱动装置平稳运行,再配合万向节接头的设计,可以保证组装后的管道机器人能够顺畅地通过各种管道的弯头,包括90
°
的长半径弯头。
【附图说明】
20.下面参照附图结合实施例对本实用新型作进一步的说明。
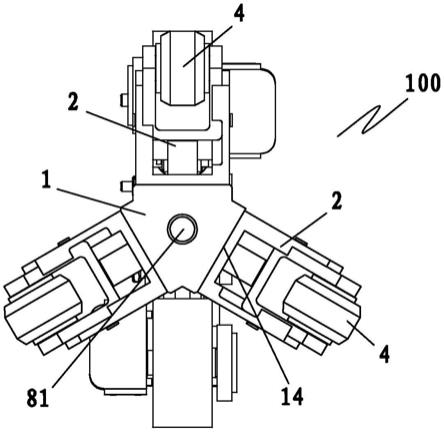
21.图1是本实用新型一种便于拓展的微型管道机器人的驱动装置在作为中间节时的正视图;
22.图2是本实用新型一种便于拓展的微型管道机器人的驱动装置在作为中间节时的侧视图;
23.图3是本实用新型一种便于拓展的微型管道机器人的驱动装置在作为中间节时的俯视图;
24.图4是本实用新型的驱动装置在进入管道内的正视图;
25.图5是本实用新型的驱动装置在进入管道内的剖视图;
26.图6是本实用新型一种便于拓展的微型管道机器人的驱动装置在作为最后一节时的后视图;
27.图7是本实用新型一种便于拓展的微型管道机器人的驱动装置在作为最后一节时的侧视图。
28.附图标记说明:
29.100-驱动装置;
30.1-总支架,11-支撑凸部,111-支撑凸部连接销,12-弹簧装配腔室,13-压缩限位槽,14-安装平面;
31.2-弹性支撑结构,21-安装底座,211-支撑架装配槽,2121-支撑架限位柱,2122-支撑架限位槽,22-支撑架,221-延伸柱,23-支撑轮弹簧;
32.3-管道;
33.4-支撑轮;
34.5-摇摆机构,51-摇摆臂,52-连杆,521-连杆连接销,53-弹簧压片,531-弹簧压片限位销,54-驱动轮弹簧,55-驱动轮摆动活动空间;
35.6-驱动轮;
36.7-驱动机构;
37.81-万向节接头,82-安全绳安装口,83-电气总接头。
【具体实施方式】
38.为了更好地理解本实用新型的技术方案,下面将结合说明书附图以及具体的实施方式对本实用新型的技术方案进行详细的说明。
39.请参阅图1至图7所示,本实用新型一种便于拓展的微型管道机器人的驱动装置100的较佳实施例,所述驱动装置100包括总支架1、设于所述总支架1的两端用于实现径向伸缩的弹性支撑结构2、安装于所述弹性支撑结构2上用于支撑在管道3内壁上的支撑轮4、铰接于所述总支架1的中部用于实现径向摆动的摇摆机构5、设置在所述摇摆机构5上的驱动轮6以及驱使所述驱动轮6沿着管道3的内壁前进或者后退的驱动机构7;其中,所谓的径向是指沿着管道3的直径方向;所述弹性支撑结构2和支撑轮4配合用于对整个驱动装置100的前后两端起到支撑作用,保证整个驱动装置100在移动过程中的稳定性;所述弹性支撑结构2用于实现支撑轮4的压缩或者张开,保证在工作的过程中支撑轮4始终贴于管道3的内壁;所述摇摆机构5用于通过摆动的方式实现驱动轮6的压缩或者张开,保证在工作的过程中驱动轮6始终贴于管道3的内壁。本实用新型中通过将支撑轮4设置在能够实现径向伸缩的弹性支撑结构2上,同时将驱动轮6设置在能够实现径向摆动的摇摆机构5上,使得具体工作时,在驱动机构7驱使整个驱动装置100沿着管道3的内壁前进或者后退的过程中,支撑轮4和驱动轮6都能够跟随管道3管径的变化而变化,即当管道3的管径变小时,支撑轮4和驱动轮6能够被压缩;而当管道3的管径变大时,支撑轮4和驱动轮6能够向外张开,因此该驱动装置100能够自适应管道的管径变化,实现管道3内部的越障功能,并且采用该驱动装置100的结构设计能够很好的适应70-80mm的小管径管道,使用范围更加广泛。
40.在本实用新型的实施例中,所述摇摆机构5包括摇摆臂51、连杆52、弹簧压片53以及驱动轮弹簧54;所述总支架1上形成有支撑凸部11,所述摇摆臂51的一端通过支撑凸部连接销111与所述支撑凸部11铰接,使摇摆臂51能够绕所述支撑凸部11进行摆动;所述驱动轮6与所述摇摆臂51的另一端转动连接,且所述驱动轮6与靠近该驱动轮6的弹性支撑结构2之间形成有驱动轮摆动活动空间55,使得驱动轮6能够跟随摇摆臂51一起摆动;
41.所述总支架1上对应于所述摇摆臂51的中部位置形成有弹簧装配腔室12,所述驱动轮弹簧54和弹簧压片53均设于所述弹簧装配腔室12内,且所述驱动轮弹簧54的端部抵顶于所述弹簧压片53上;所述摇摆臂51的中部通过连杆连接销521与所述连杆52的一端铰接,所述连杆52的另一端通过弹簧压片限位销531与所述弹簧压片53铰接;所述总支架1上对应于所述弹簧压片限位销531的两端开设有压缩限位槽13,实现对弹簧压片限位销531进行限位。所述摇摆机构5工作时,在驱动轮6沿着管道3的内壁行走的过程中,当遇到障碍或者管径缩小的情况时,在摇摆臂51、连杆52和弹簧压片53的配合下能够将驱动轮弹簧54往内压缩,进而带动驱动轮6往内收缩,使驱动轮6可以顺利越过障碍或者通过管径缩小的部位;而当驱动轮6越过障碍或者通过管径缩小的部位后,在驱动轮弹簧54的弹力作用下能够带动驱动轮6向外张开,使驱动轮6沿着管道3的内壁继续行走。
42.在本实用新型的实施例中,所述总支架1的中部设有两个所述摇摆机构5,两个所述摇摆机构5之间的夹角为180
°
,从而确保整个驱动装置100前进或者后退更加平稳;所述驱动轮弹簧54的一端抵顶于一所述摇摆机构5的弹簧压片53上,所述驱动轮弹簧54的另一端抵顶于另一所述摇摆机构5的弹簧压片53上,即本实用新型的实施例中仅设置有一个驱动轮弹簧54,两个摇摆机构5的弹簧压片53分别抵顶在驱动轮弹簧54的两端,通过该设计能够降低整个驱动装置100的结构复杂度,并降低成本。
43.在本实用新型的实施例中,所述驱动机构7为固定在摇摆臂51上的驱动电机,这样驱动机构7能够跟随摇摆臂51一起摆动,并驱使驱动轮6工作。
44.在本实用新型的实施例中,所述弹性支撑结构2包括安装底座21、支撑架22以及支撑轮弹簧23;
45.所述安装底座21固定在总支架1上,且所述安装底座21上形成有支撑架装配槽211,整个安装底座21呈u字型结构;所述支撑架22可上下活动地设置在所述支撑架装配槽211内,所述支撑轮4转动设置在所述支撑架22上,这样支撑轮4就能够跟随支撑架22一起上下活动,从而实现越障或者自适应变径功能;所述支撑轮弹簧23设置在所述安装底座21的内底部与支撑架22的外底部之间,所述支撑架22的底部具有插入至所述支撑轮弹簧23内的延伸柱221,即整个支撑架22呈y字型结构;所述支撑架装配槽211的上端设置有用于对所述支撑架22进行限位的限位结构(未图示),保证支撑架22不会与支撑架装配槽211脱离;在具体实现时,所述限位结构可以包括支撑架限位柱2121和支撑架限位槽2122,其中,所述支撑架限位柱2121固定在支撑架装配槽211上端的槽壁上,所述支撑架限位槽2122开设在支撑架22上,且所述支撑架限位柱2121插入至支撑架限位槽2122内。所述弹性支撑结构2工作时,在支撑轮4沿着管道3的内壁行走的过程中,当遇到障碍或者管径缩小的情况时,在支撑架22、支撑架装配槽211和支撑轮弹簧23配合下能够带动支撑轮4往内收缩,使支撑轮4可以顺利越过障碍或者通过管径缩小的部位;而当支撑轮4越过障碍或者通过管径缩小的部位后,在支撑轮弹簧23的弹力作用下能够带动支撑轮4向外张开,使支撑轮4沿着管道3的内壁
继续行走实现支撑。
46.在本实用新型的实施例中,为了对整个驱动装置100进行更有效地支撑,保证整个驱动装置100前进或者后退的稳定性,所述总支架1的两端各设置有三个所述弹性支撑结构2,且三个所述弹性支撑结构2围绕所述总支架1的端部等间距均匀分布设置。在具体实现时,所述总支架1的两端在外壁面形成有三个安装平面14,每所述弹性支撑结构2均固定安装在一所述安装平面14上。
47.在本实用新型的实施例中,在驱动装置100作为中间节时,所述总支架1的前后两端均设置有万向节接头81,所述万向节接头81用于与需要驱动的工作节相连接。
48.请重点参照图6和图7所示,在本实用新型的实施例中,在驱动装置100作为最后一节时,所述总支架1的前端设置有万向节接头81,所述总支架1的后端设置有安全绳安装口82和电气总接头83,其中,所述万向节接头81用于与需要驱动的工作节相连接;所述安全绳安装口82用于安装安全绳,安全绳可以采用捆绑或者采用挂钩的方式与安全绳安装口82相连接;所述电气总接头83连接需要使用的电气设备。
49.在本实用新型的实施例中,在驱动装置100作为第一节时,所述总支架1的前端设置有摄像装置(未图示),所述总支架1的后端设置有万向节接头81;其中,所述摄像装置用于拍摄管道3的内部环境,以便于相关工作人员可以查看管道3的内部环境,当然在具体实现时,所述摄像装置还可以根据实际工作需要替换为激光扫描设备、探头等;所述万向节接头81用于实现与需要驱动的工作节相连接,从而通过驱动装置100带动工作节在管道3内作业。
50.本实用新型中通过在总支架1的前端和/或后端设置万向节接头81,在使用时可方便通过万向节接头81进行功能拓展,包括可以根据实际使用需要增减驱动装置100的数量,以更好地满足管道机器人的动力需求;可以根据实际需要在驱动装置100的前端或者后端组装不同的工作节,以组成具有多种功能的管道机器人。同时,本实用新型中摇摆机构5和弹性支撑结构2设计,使得支撑轮4和驱动轮6能够很好地适应管道3的管径变化,并且能够保证整个驱动装置100平稳运行,再配合万向节接头81的设计,可以保证组装后的管道机器人能够顺畅地通过各种管道3的弯头,包括90
°
的长半径弯头。
51.本实用新型的驱动装置100在具体使用时,当进入管道3时,通过压缩支撑轮弹簧23和驱动轮弹簧54,使得支撑轮4和驱动轮6都能够进入到管道3的内壁,并且在支撑轮弹簧23和驱动轮弹簧54的弹力作用下,支撑轮4和驱动轮6均贴于管道3的内壁;在工作时,给驱动机构7上电,驱动机构7带动驱动轮6旋转,从而驱使整个驱动装置100沿着管道3的内壁前进或者后退,具体可以通过电机的正反转来实现前进或者后退功能;当前进或者后退的过程中遇到障碍或者管径变小的部位时,支撑轮4通过压缩支撑轮弹簧23实现往内收回,驱动轮6通过压缩驱动轮弹簧54实现往内收回,从而实现越障或者自适应管径变化的功能;当支撑轮4或驱动轮6越过障碍或者通过管径变小的部位时,支撑轮4在支撑轮弹簧23的弹力作用下张开并贴于管道3的内壁,驱动轮6在驱动轮弹簧54的弹力作用下张开并贴于管道3的内壁。
52.虽然以上描述了本实用新型的具体实施方式,但是熟悉本技术领域的技术人员应当理解,我们所描述的具体的实施例只是说明性的,而不是用于对本实用新型的范围的限定,熟悉本领域的技术人员在依照本实用新型的精神所作的等效的修饰以及变化,都应当
涵盖在本实用新型的权利要求所保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1