调节机构的制作方法
1.本技术涉及一种投影机六轴悬挂式调整平台,特别是涉及一种调节机构。
背景技术:
2.投影机的正装、吊装、侧投或组合使用时,常常通过一些调节机构来对投影机的位置和角度进行调节来适应各种场景,尤其是大画面、高分辨率的应用场合,需要多个投影机组合使用,且通过各投影机之间较为精准的配合才能投射出符合条件的画面,此时需要对投影机的多个移动及旋转自由度同时进行高精度调节,特别对于超短焦这类对位置偏移比较敏感的投影设备而言,调节精度要求很高,这给结构设计带来较大困难。
技术实现要素:
3.本技术提供了一种调节机构,主要解决的技术问题是解决投影机六轴调节的技术问题。
4.为解决上述技术问题,本技术提供了一种调节机构,该机构包括旋转调节组件、移动旋转连接板和移动调节组件。旋转调节组件包括第一基板、第二基板和第三基板,第一调节件、第二调节件和第三调节件,第一基板用于安装待调节机构;第一基板转动连接于第二基板,第一调节件设置于第一基板和第二基板之间,驱动第一基板相对第二基板转动;第二基板转动连接于第三基板,第二调节件设置于第二基板和第三基板之间,驱动第二基板相对第三基板转动;第三基板转动连接于移动旋转连接板,第三调节件设置于第三基板和移动旋转连接板之间,驱动第三基板相对移动旋转连接板转动;第一基板、第二基板和第三基板的转动方向不同;移动调节组件包括延伸方向各不相同的第一滑轨、第二滑轨和第三滑轨,移动旋转连接板滑动设置在第一滑轨上,第一滑轨滑动设置在第二滑轨上,第二轴滑轨滑动设置在第三滑轨上。
5.本技术的有益效果是:旋转调节组件包括第一基板、第二基板和第三基板,第一调节件、第二调节件和第三调节件,通过调节件可对应调节基板,并且每个基板的转动方向不同,旋转调节组件通过上述连接方式,能够实现三轴的旋转调节;移动调节组件包括延伸方向各不相同的第一滑轨、第二滑轨和第三滑轨,通过不同方向的滑轨,可以实现三个不同方向的移动调节;进一步地,移动旋转连接板滑动设置在第一滑轨上,第三基板转动连接于移动旋转连接板,通过移动旋转连接板的连接,整个调节机构可以实现六个不同维度方向的调节。
附图说明
6.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。其中:
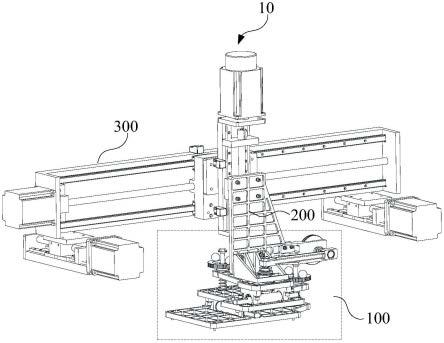
7.图1是本技术提供的调节机构一实施例的结构示意图;
8.图2是本技术提供的旋转调节件及移动旋转连接板一实施例的结构示意图;
9.图3是本技术提供的旋转调节件及移动旋转连接板的爆炸图;
10.图4是本技术提供的移动调节件一实施例的结构示意图;
11.图5是本技术提供的移动调节件的爆炸图;
12.图6是本技术提供的调节机构一实施方式示意图。
具体实施方式
13.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术的一部分实施例,而不是全部的实施例。根据本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
14.为解决上述技术问题,本技术提出了一种调节机构10,具体请参阅图1至图5,图1是本技术提供的调节机构10结构示意图。本技术提供了一种调节机构10,该机构包括旋转调节组件100、移动旋转连接板200和移动调节组件300。旋转调节组件100包括第一基板110、第二基板120和第三基板130,第一调节件140、第二调节件150和第三调节件160。第一基板110用于安装待调节机构,第一基板110转动连接于第二基板120,第一调节件140设置于第一基板110和第二基板120之间,驱动第一基板110相对第二基板120转动;第二基板120转动连接于第三基板130,第二调节件150设置于第二基板120和第三基板130之间,驱动第二基板120相对第三基板130转动;第三基板130转动连接于移动旋转连接板200,第三调节件160设置于第三基板130和移动旋转连接板200之间,驱动第三基板130相对移动旋转连接板200转动。第一基板110、第二基板120和第三基板130的转动方向不同;移动调节组件300包括延伸方向各不相同的第一滑轨301、第二滑轨302和第三滑轨303,移动旋转连接板200滑动设置在第一滑轨301上,第一滑轨301滑动设置在第二滑轨302上,第二滑轨302滑动设置在第三滑轨303上。
15.旋转调节组件100包括第一基板110、第二基板120和第三基板130,第一调节件140、第二调节件150和第三调节件160,通过不同的调节件可对应调节不同的基板,并且每个基板的转动方向不同。旋转调节组件100通过上述连接方式,能够实现三轴的旋转调节。移动调节组件300包括延伸方向各不相同的第一滑轨301、第二滑轨302和第三滑轨303,通过不同方向的滑轨,可以实现三个不同方向的移动调节。进一步地,移动旋转连接板200滑动设置在第一滑轨301上,第三基板130转动连接于移动旋转连接板200,通过移动旋转连接板200的连接,整个调节机构10可以实现六个不同维度的调节。
16.参阅图2至图3,可选地,旋转调节组件100中,第一基板110和第二基板120的转动方向为绕水平轴转动方向,第一基板110和第二基板120之间设置有第一转动连接结构170,第二基板120和第三基板130之间设置有第二转动连接结构180。第一转动连接结构170包括第一轴承座171、第一轴承172和第一旋转轴173。第一轴承172安装于第一轴承座171内,第一轴承座171固定于第二基板120上,第一旋转轴173穿过第一轴承172固定于第一基板110上。第二转动连接结构180包括第二轴承座181、第二轴承182和第二旋转轴183。第二轴承182安装于第二轴承座181内,第二轴承座181固定于第三基板130上,第二旋转轴183穿过第
二轴承182固定于第二基板120上。
17.第一基板110和第二基板120之间通过第一转动连接结构170连接,而第一转动连接结构170包括第一轴承座171、第一轴承172和第一旋转轴173。其中,第一轴承172安装于第一轴承座171内。连接第一基板110与第二基板120时,将两个第一轴承座171通过螺钉锁附在第二基板120上,第一旋转轴173的两头穿过第一轴承172锁附在第一基板110上。
18.第二基板120和第三基板130之间通过第二转动连接结构180连接,第二转动结构包括第二轴承座181、第二轴承182和第二旋转轴183。其中,第二轴承182安装于第二轴承座181内。连接第二基板120与第三基板130时,将两个第二轴承座181通过螺钉锁附在第三基板130上,第二旋转轴183的两头穿过第二轴承182锁附在第二基板120上。其中,第二旋转轴183与第二轴承182配合公差优选但不限于过渡配合,在过渡配合时可借用橡胶锤敲入,便于装配。
19.可选地,旋转组件中,第一基板110和第二基板120的转动方向为绕水平轴转动方向。第一调节件140包括第一旋转轮141和第一旋转杆142,第一旋转杆142一端固定于第一基板110,另一端穿过第二基板120,安装第一旋转轮141。转动第一旋转轮141时,第一旋转杆142带动第一基板110绕第一旋转轴173转动。
20.第二调节件150包括第二旋转轮151和第二旋转杆152,第二旋转杆152一端固定于第二基板120,另一端穿过第三基板130,安装第二旋转轮151。转动第二旋转轮151时,第二旋转杆152带动第二基板120和第一基板绕第二旋转轴183转动。
21.第一旋转杆142为螺栓,螺栓上有内螺纹,压铆固定在第一基板110上,穿过第二基板120的腰型孔,安装第一旋转轮141,第一旋转轮141上有内螺纹。其中,第二基板120与第一旋转轮141之间还可以安装垫圈,在转动第一旋转轮141时,能够减少第一旋转轮141与第二基板120直接接触造成的磨损,为了预防第一旋转轮141从第一旋转杆142中脱落,在第一旋转轮141上可以装上锁紧配件限位。转动第一调节件140时,即转动第一旋转轮141,旋转轮上的内螺纹通过螺纹副联接有外螺纹的第一旋转杆142,第二基板120不动,第一旋转杆142在第二基板120腰型孔内摆动,使得第二基板120一端和固定第一旋转杆142的第一基板110的一端的距离发生变化,实现第一基板110绕第一旋转轴173旋转。
22.同理有第二旋转杆152为螺栓,螺栓上有内螺纹,压铆固定在第二基板120上,穿过第三基板130的腰型孔,安装第二旋转轮151,第二旋转轮151上有内螺纹。其中,第三基板130与第二旋转轮151之间同理可以安装垫圈,在转动第二旋转轮151时,能够减少第二旋转轮151与第三基板130直接接触造成的磨损,为了预防第二旋转轮151从第二旋转杆152中脱落,在第二旋转轮151上可以装上锁紧配件限位。转动第二调节件150时,即转动第二旋转轮151,第二旋转轮151上的内螺纹通过螺纹副联接有外螺纹的第二旋转杆152,第三基板130不动,第二旋转杆152在第三基板130腰型孔内摆动,使得第三基板130一端和固定第二旋转杆152的第二基板120一端的距离发生变化,实现第二基板120与第一基板110绕第二旋转轴183旋转。
23.进一步地,第一调节件140还包括第一弹簧143。第一弹簧143穿过第一旋转杆142,设置于第一基板110和第二基板120之间,用于第一旋转杆142转动固定。第二调节件150还包括第二弹簧153,第二弹簧153穿过第二旋转杆152,设置于第二基板120和第三基板130之间,用于第二旋转杆152转动固定。
24.第一弹簧143穿过第一旋转杆142,设置于第一基板110和第二基板120之间,用于第一旋转杆142转动固定,即第一旋转轮141转动带动第一旋转杆142时,第一弹簧143可以起到防松的作用,防止第一旋转杆142在第二基板120的腰型孔中自由摆动,同时,在投影机处于正装状态时,弹簧处于最小压缩状态,其产生的力矩可以平衡投影机重力的影响。同理有第二弹簧153穿过第二旋转杆152,设置于第二基板120和第三基板130之间,第二旋转轮151转动带动第二旋转杆152时,第二弹簧153防止第二旋转杆152在第三基板130的腰型孔中自由摆动。
25.更进一步地,第一旋转轮141和第二旋转轮151上均设置有刻度,刻度对应旋转程度。
26.第一旋转轮141和第二旋转轮151均设置有刻度,第一旋转轮141和第二旋转轮151每旋转一圈,相应的角度均为定值。通过使用设置有刻度的旋转轮,能够实时显示旋转角度值,可以更精准快捷地实现协同调节。
27.可选地,第三基板130的转动方向为绕竖直轴转动方向,第三调节件160包括转接块161、旋转基板162、第三旋转轮163、第三旋转杆164、第四旋转杆165、第三旋转轴166和第三紧固件167。转接块161与旋转基板162均固定于移动旋转连接板200,第三旋转杆164一端固定于第四旋转杆165的一端,另一端穿过转接块161,安装第三旋转轮163;第三旋转轴166固定于第三基板130,依次穿过旋转基板162及第四旋转杆165的另一端,安装第三紧固件167。其中,旋转第三旋转轮163带动第三旋转杆164摆动,第三旋转杆164摆动同时带动转接块161一端以及第四旋转杆165一端的距离变化,带动旋转基板162绕第三旋转轴166转动。
28.其中,转接块161与旋转基板162均用螺钉锁附在移动旋转连接板200上,第三旋转杆164为螺栓,螺栓上有内螺纹,第三旋转杆164一端压铆固定在第四旋转杆165的一端,另一端穿过转接块161,安装第三旋转轮163,第三旋转轮163设置有内螺纹。为了减少第三旋转轮163与转接块161直接接触造成的磨损,在第三旋转轮163和转接块161之间安装垫圈;为了预防第三旋转轮163从第三旋转杆164中脱落,在第三旋转轮163上可以装上锁紧配件限位。第三旋转轴166锁附在第三基板130上,依次穿过旋转基板162及第四旋转杆165的另一端,安装第三紧固件167将第四旋转杆165锁于第三旋转轴166,其中,在旋转基板162与第四旋转杆165之间可以安装轴承组件、止动螺母配件等,能有效防止第三旋转轴166径向摆动。转动第三旋转轮163时,第三旋转轮163上的内螺纹通过螺纹副联接有外螺纹的第三旋转杆164,带动第三旋转杆164摆动,第三旋转杆164摆动的同时带动转接块161一端以及第四旋转杆165一端的距离变化,带动旋转基板162绕第三旋转轴166转动。
29.进一步地,第三调节件160还包括第三弹簧168,第三弹簧168穿过第三旋转杆164,连接于第四旋转杆165和转接块161之间,用于第三旋转杆164转动固定。
30.第三弹簧168穿过第三旋转杆164,设置于转接块161和第四旋转杆165之间,用于第三旋转杆164转动固定,即第三旋转轮163转动带动第三旋转杆164时,第三弹簧168可以起到防松的作用,防止第三旋转杆164在转接块161的腰型孔中自由摆动,同时,在投影机处于正装状态时,弹簧处于最小压缩状态,其产生的力矩可以平衡投影机重力的影响。
31.更进一步地,第三旋转轮163上设置有刻度,刻度对应旋转程度。
32.第三旋转轮163上设置有刻度,第三旋转轮163每旋转一圈,相应的角度均为定值。通过使用设置有刻度的旋转轮,能够实时显示旋转角度值,可以更精准快捷地实现协同调
节。
33.旋转调节组件100通过设置三个不同旋转方向的基板以及对应的调节件,通过旋转不同调节件中的旋转轮,即旋转轮通过螺纹副联,接压铆在基板上的六角螺栓,当旋转轮转动时,其机械力通过螺纹副传递到基板,基板绕旋转轴转动,从而实现不同方向的旋转。例如三个旋转调节方向可对应坐标系中的不同轴向,第一基板110旋转方向可以对应于y轴,第二基板120旋转方向可以对应于x轴,第三基板130旋转方向可以对应于z轴。
34.一个实施例中,投影机放置于调节机构10上,调节不同轴向对应的调节机构10上的旋转轮时,可以转动不同的旋转轮来实现投影机对3轴旋转调节的需要。为了更精准地实现各画面之间像素的调节精度,调节件中的旋转轴的旋转中心与相对应旋转轮的中心距离巧妙地利用杠杆原理来放大螺纹副的调节精度。例如,旋转轴的旋转中心与对应的旋转轮的中心距离为184.8mm,螺纹螺距为1mm,则转动1/5圈时有:
35.△
θ=arctan[(1/5)/184.8]=0.062
°
。
[0036]
参阅图4至图5,移动调节组件300中,第一滑轨301为第一丝杆,第二滑轨302为第二丝杆,第三滑轨303为第三丝杆。
[0037]
移动调节组件300还包括第一滑块304、第二滑块305、第三滑块306、第一底座307、第二底座308和第三底座309。第一丝杆穿设于第一滑块304,安装于第一底座307内,移动旋转连接板200固定连接于第一滑块304。第二丝杆穿设于第二滑块305,安装于第二底座308内,第一底座307固定连接于第二滑块305。第三丝杆穿设于第三滑块306,安装于第三底座309内,第二底座308固定连接于第三滑块306。
[0038]
移动调节组件300中的第一滑轨301为第一丝杆,第二滑轨302为第二丝杆,第三滑轨303为第三丝杆,沿着不同滑轨移动,即沿着不同的丝杆滑动,可以移动至不同方向。
[0039]
移动调节组件300还包括第一滑块304、第二滑块305、第三滑块306、第一底座307、第二底座308和第三底座309。第三丝杆穿设于第三滑块306,安装于第三底座309内,其中,整个调节机构通过第三底座309固定,两个第三底座309有浮动螺母沟槽,放置浮动螺母,可在一定范围内灵活固定,适用性强。第二丝杆穿设于第二滑块305,安装于第二底座308内,第二底座308用螺丝固定连接于第三滑块306的上部;第一丝杆穿设于第一滑块304,安装于第一底座307内,第一底座307用螺丝固定连接于第二滑块305的上部,而移动旋转连接板200则用螺钉锁附在第一滑块304上。
[0040]
由于不同滑轨之间通过对应底座设置在不同方向上,则滑动不同丝杆上的的滑块时,滑块可以沿着不同方向的丝杠移动,即实现不同方向的移动。例如,三个滑轨方向可对应坐标系中的不同轴向,第三滑轨303对应y轴,第二滑轨302对应x轴,第一滑轨301对应z轴。
[0041]
可选地,移动组件还包括第一电机310、第二电机311和第三电机312。其中,第一电机310安装于第一底座307一端,用于驱动第一滑块304沿第一丝杆滑动;第二电机311安装于第二底座308一端,用于驱动第二滑块305沿第二丝杆滑动;第三电机312安装于第三底座309一端,用于驱动第三滑块306沿第三丝杆滑动。
[0042]
通过在第一底座307、第二底座308和第三底座309上安装控制各自滑块沿丝杆移动的第一电机310、第二电机311和第三电机312,能够实现移动调节组件300中第一滑块304、第二滑块305和第三滑块306在对应丝杆方向上的自动移动。
[0043]
一个实施例中,投影机放置于调节结构上,投影机沿着y轴方向移动时,可以用来完成画面大小的调节;投影机沿着x轴方向移动时,可以用来完成画面水平方向的调节;投影机沿着z轴方向移动时,可以用来完成画面垂直方向的调节。
[0044]
参阅图6,本实用新型的工作原理为:将待调节机构20安装在第一基板110底部,旋转调节组件100通过转动不同轴向对应的旋转轮,可以实现三个旋转自由度的解耦调节;滑动调节组件300可通过滑动不同延伸方向滑轨内的滑块,实现三个移动自由度的调节;而旋转调节组件100连接于移动旋转连接板200,移动旋转连接板200设置于移动调节组件300的第一滑块304上,实现旋转调节组件100以及滑动调节组件300的连接,即可以实现六个不同维度的调节。
[0045]
本技术提供的调节机构10,调节精度高,可以使用在投影工程机等项目上,适用于多种应用场合,通过对六个自由度的调节来改变摄影机的位置,从而实现画面对位。
[0046]
以上所述仅为本技术的实施方式,并非因此限制本技术的专利范围,凡是利用本技术说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本技术的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1