1.本公开涉及一种用于控制磁浮系统的控制系统,该磁浮系统可以是,例如但不一定是,主动磁轴承“amb”系统。此外,本公开涉及一种磁浮系统。
背景技术:2.磁浮系统,诸如例如主动磁轴承“amb”系统,通常用于使例如旋转或振荡的物体悬浮。典型的应用是电机(例如高速电机)的转子的悬浮。在许多情况下,悬浮是通过平衡相反作用的磁体的吸引力和作用在待悬浮物体上的其它力来实现的,其中磁体中的至少一个磁体是能够控制的电磁体。原则上,也可以用与电磁体的吸引力对抗作用的其它力例如重力来平衡一个能够控制的电磁体的吸引力。有几种不同类型的磁浮系统。一些系统使用永磁材料来生成偏置磁通量,而其它系统使用直流偏置电流来生成偏置磁通量。该偏置用于线性化系统的操作并且改善系统的控制动力学。
3.由于磁悬浮的固有不稳定性,需要主动控制作用在悬浮物体(例如电机的转子)的自由度中的磁力。这种不稳定性是由这样的事实引起的,即当磁体与由例如铁磁材料制成的物体之间的气隙变小时,磁体与该物体之间的磁吸引力增加。在典型的主动磁轴承系统中,有五个要控制的自由度,因此需要十个控制器电流源。所有这些都应该以集中的方式操作,以提供amb系统的良好可控性,并且考虑不同自由度之间的关联。
4.存在具有较长轴的amb系统,其中需要额外的轴承来提供可靠的悬浮。每个径向轴承需要四个控制器电流源,因此快速增加了控制器电流源的总量。因此,在上面提到的类型的amb系统中,控制系统需要大量的控制器电流源来提供磁悬浮。与大量控制器电流源相关的挑战已经通过修改功率电子器件以提供更多的控制器电流源来解决,但这需要额外的开发并且降低了成本效率。替代地,当不同的轴承独立操作时,已采用去中心化方案,在这种情况下,磁悬浮的可控性和稳定性可能会降低。
技术实现要素:5.为了提供对各种发明实施例的一些方面的基本理解,下面给出了简化的发明内容。该发明内容不是本发明的广泛综述。它既不旨在标识本发明的关键或重要元素,也不旨在标示本发明的范围。以下发明内容仅仅以简化的形式呈现了本发明的一些概念,作为对本发明的示例性实施例的更详细描述的序言。
6.在本文中,当用作前缀时,单词“几何”意味着不一定是任何物理对象的一部分的几何概念。该几何概念可以是例如几何点、直线或曲线几何线、几何平面、非平面几何表面、几何空间或任何其它零维、一维、二维或三维的几何实体。
7.根据本发明,提供了一种用于控制磁浮系统的新的控制系统,该磁浮系统可以是,例如但不一定是,用于使旋转元件(例如电机转子)悬浮的主动磁轴承“amb”系统。
8.根据本发明的控制系统包括控制器,该控制器中的每一个被配置成控制磁浮系统的一个或多个磁致动器,以使物体磁性地悬浮。这些控制器中的一个被配置成作为主控制
器操作,而这些控制器中的其它一个或多个被配置成作为一个或多个从控制器操作。主控制器通过一个或多个数字数据传输链路通信地连接到该一个或多个从控制器,其中经由该一个或多个数字数据传输链路传输的数字数据指示磁致动器的线圈的电流的参考值,主控制器被配置成控制该一个或多个从控制器的操作。
9.根据本发明的控制系统能够利用单独的控制器实施集中控制,并且从而不需要具有大量控制器电流源的控制器。
10.根据本发明,还提供了一种新的磁浮系统,包括:
[0011]-磁致动器,该磁致动器被构造成使物体磁性地悬浮,
[0012]-位置传感器系统,该位置传感器系统用于生成指示物体相对于物体参考位置的位置信号,以及
[0013]-根据本发明的控制系统,该控制系统用于基于位置信号来控制磁致动器的线圈的电流。
[0014]
在所附的从属权利要求中描述了示例性且非限制性的实施例。
[0015]
当结合附图阅读时,从具体的示例性且非限制性实施例的以下描述中,将最好地理解关于构造和操作方法的各种示例性且非限制性实施例及其额外目的和优点。
[0016]
动词“包括”和“包含”在本文中用作开放的限制,既不排除也不要求存在未叙述的特征。
[0017]
除非另有明确说明,从属权利要求中所叙述的特征可以相互自由组合。
[0018]
此外,应该理解的是,贯穿本文的“一”或“一个”的使用,即单数形式,并不排除复数。
附图说明
[0019]
示例性且非限制性的实施例及其优点将在下面参考附图以示例的方式更详细地解释,其中:
[0020]
图1a和图1b示出了包括根据示例性且非限制性实施例的控制系统的磁浮系统,
[0021]
图2示出了包括根据示例性且非限制性实施例的控制系统的磁浮系统的一部分,以及
[0022]
图3a、图3b、图3c和图3d示出了能够用根据示例性且非限制性实施例的控制系统控制的磁致动器的示例性绕组布置。
具体实施方式
[0023]
以下描述中提供的具体示例不应被解释为限制所附权利要求的范围和/或适用性。除非另有明确说明,否则说明书中提供的示例列表和示例组不是穷尽性的。
[0024]
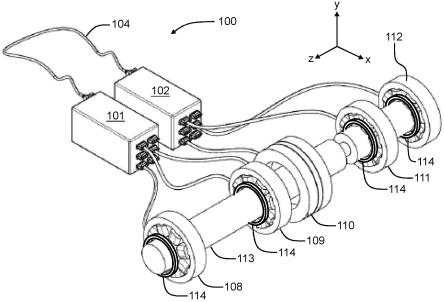
图1a示出了磁浮系统,其包括根据示例性且非限制性实施例的控制系统100。磁浮系统包括构造成使物体113磁性地悬浮的磁致动器108、109、110、111和112。在此示例性情况下,磁浮系统是主动磁轴承“amb”系统,并且物体113是旋转元件,其例如可以是电机的转子。磁致动器108、109、111和112是径向磁轴承,磁致动器110是轴向磁轴承。
[0025]
磁浮系统包括位置传感器系统114,该位置传感器系统114用于生成位置信号,该位置信号指示物体113相对于物体参考位置的位置。位置传感器系统114可以包括例如感应
式传感器,其中每个感应式传感器的电感取决于从所考虑的感应式传感器到物体113表面的距离。还可能的是,位置传感器系统包括用于基于磁致动器108-112的线圈的电感之间的差异来形成位置信号的装置。当导向所考虑的线圈的电压以步进方式变化时,可以基于例如电流的变化率di/dt来估计每个线圈的电感。在此示例性情况下,不需要单独的位置传感器。
[0026]
控制系统100被配置成基于上文提到的位置信号来控制磁致动器108-112的线圈的电流。控制系统100包括控制器101和控制器102,控制器101和控制器102中的每一个控制器被配置成控制这些磁致动器中对应的磁致动器,以用于使物体113磁性地悬浮。控制器101和控制器102中的一个控制器被配置成作为主控制器来操作,而该控制器中101、102中的另一个控制器被配置成作为从控制器来操作。主控制器通过数字数据传输链路104通信地连接到从控制器,并且主控制器被配置成控制从控制器的操作。因此,可以利用单独的控制器101和控制器102实施集中控制,并且从而不需要具有大量控制器电流源的控制器。在示例性实施例中,在控制器101与控制器102之间传输的数字数据指示磁致动器的线圈的电流的参考值,并且控制器101和控制器102被配置成使用该数字数据来协调控制器101和控制器102的操作,使得例如可以避免磁致动器中的两个或更多个磁致动器彼此对抗作用的情况。在另一个示例性实施例中,与磁悬浮相关的所有计算都由主控制器执行,并且一个或多个从控制器仅用作能够控制的电流源,该能够控制的电流源由经由数字数据传输链路从主控制器接收的参考值来控制。
[0027]
在根据示例性且非限制性实施例的控制器系统中,控制器中的每一个控制器包括控制板,该控制板被配置成执行与磁悬浮相关的计算。此外,控制器中的每一个控制器包括可替换的电源板,这些电源板中的每一个电源板被配置成根据从控制板接收的控制信号来供应电流。在图1b中,控制板用附图标记105表示,可替换的电源板用附图标记106表示。上述布置能够通过改变可替换的电源板的数量和额定电流来使每个控制器适应不同的要求。
[0028]
图1b所示的控制板105可以包括一个或多个处理器电路,该一个或多个处理器电路中的每一个处理器电路中可以是配备有适当软件的可编程处理器电路,专用硬件处理器,诸如例如专用集成电路“asic”,或者能够配置的硬件处理器,例如现场可编程门阵列“fpga”。此外,控制板105可以包括一个或多个存储设备,诸如例如随机存取存储器“ram”设备。可替换的电源板106中的每一个电源板可以包括例如被配置成构成例如全h桥或半h桥的晶体管和用于驱动晶体管的驱动器电路。
[0029]
图2示出了包括根据示例性且非限制性实施例的控制系统200的磁浮系统的一部分。该控制系统包括用于控制磁浮系统的磁致动器(例如主动磁性轴承)的控制器201、202和203。在此示例性情况下,控制器202和控制器203连接到磁致动器的同一线圈207。这种布置提供了冗余,从而改善了可靠性。控制器201、202和203中的一个控制器充当主控制器,该主控制器被配置成选择控制器202和控制器203中的哪一个用于向线圈207供应电流。在示例性实施例中,主控制器被配置成将一个或多个量与该一个或多个量的容许范围进行比较,并且至少部分地基于该比较来选择这些控制器202和203中的一个控制器,其中该一个或多个量与控制器202和控制器203中的每一个控制器的操作相关。与每个控制器的操作相关的一个或多个量可以包括例如测量的电流、电流的参考值、控制器的直流“dc”电压、悬浮物体的位置估计和/或控制器中测量的温度。在示例性实施例中,三个或更多个控制器连接
到同一线圈,并且这些控制器被配置成产生线圈电流的参考值,并且主控制器被配置成基于这些参考值中的大多数来选择这些控制器中的一个控制器,使得由控制器中的选定的控制器产生的参考值属于这些参考值中的大多数。
[0030]
图3a、图3b、图3c和图3d示出了能够用根据示例性且非限制性实施例的控制系统来控制的磁致动器的示例性绕组布置。图3a示出了示例性绕组布置,其中每个电磁极对被一个控制器电流源供电。图3b示出了示例性的绕组布置,其中每个电磁极对设有两个绕组,这两个绕组由不同的控制器电流源供电。控制器电流源有利地属于不同的控制器,例如以改善冗余度。图3b示出了两个示例性绕组331和332,该两个示例性绕组331和332被布置成磁化同一个电磁极对。用实线描绘的绕组331可以由第一控制器供电,用虚线描绘的绕组332可以由第二控制器供电。图3c示出了一种示例性布置,其中有多于一组电磁体用于在期望的自由度中(即在图3c的图形平面中相互垂直的方向上)实施控制。图3c示出了两个示例性绕组333和334,该两个示例性绕组333和334被布置成磁化属于上文提到的组中不同的电磁体。用实线描绘的绕组333可以由第一控制器电流源供电,用虚线描绘的绕组334可以由第二控制器电流源供电。第一控制器电流源和第二控制器电流源有利地属于不同的控制器,例如以改善冗余度。从有利地属于不同控制器的不同控制器电流源向给定电磁极对的并联绕组或向不同电磁体的绕组供应电流以控制相同自由度的可能性允许增加控制的带宽,这是因为当控制器电流源的数量增加时,限制带宽的绕组的电感减小。这允许在不改变功率电子器件的情况下,通过增加控制器的数量来操作各种规模的系统。图3d示出了示例性的绕组布置,其中每个电磁极具有单独的绕组,该绕组可以由单独的控制器电流源供电。图3d示出了两个示例性绕组335和336,该两个示例性绕组335和336被布置成磁化电磁体的磁极,并且由不同的控制器电流源供电。
[0031]
上面给出的描述中提供的具体示例不应被解释为限制所附权利要求的范围和/或适用性。除非另有明确说明,否则上面给出的描述中提供的示例列表和示例组不是穷尽性的。