海洋分离式联轴器的制作方法
1.本发明涉及一种海洋分离式联轴器(mbc),具体地涉及用于监测这种联轴器的功能和状态的系统。
背景技术:
2.在海上油气行业中,可浮动、浸没或在空中设置的柔性卸载管柱用于在一系列系统(例如悬链式锚腿系泊系统(calm)、单锚腿系泊系统(salm)、多浮标系泊系统(mbm)、串靠系泊系统、卷取系统、滑槽系统、悬链线系统、跳线系统和塔式系统)中运输产品(例如油和气)。柔性卸载管柱通常由多个区段以及相关的辅助设备组成,这些区段可以是柔性的,例如通过法兰连接在一起的橡胶软管。
3.由于这些系统位于海上环境中,它们会经受极端环境条件和不时发生的事故。特别是,卸载管柱可能承受极端负载,这可以导致整个管柱或组成管柱的各个区段发生故障。如果发生故障,根据系统的海上位置,操作团队可能需要一段时间才能动员起来管理事故并控制产品泄漏到环境中。就此而言卸载管柱的故障可能会对环境造成灾难性影响,并且成本极高。因此,通常在卸载管柱内安装mbc。然后将mbc设置成使得其在应力增加超过一定水平时分离,以允许管柱以受控的方式分离,并封闭分离的管柱以减少泄漏。
4.根据应用,可以使用不同类型的mbc,例如,如us 4326555中所描述的花瓣型或翻转/摆动型,其中盘形阀构件在正常操作期间保持平行于联轴器的轴线,但在分离的情况下翻转成垂直于该轴线以封闭产品的流动。花瓣型mbc在正常操作期间不会对产品的流动形成中断,而在翻转/摆动型mbc中,阀构件对产品的正常流动形成中断。还已知其他形式的mbc,诸如阀探针类型,其中弹簧加载的阀构件在联轴器内轴向移动以在分离时封闭联轴器。
5.众所周知,mbc在使用中可能因与刚性结构接触而损坏,例如油轮的侧面、相邻的卸载管柱、与工作船的接触、与浮动浮标的接触或在海底系统的情况下与海床的接触。mbc的任何损坏都会影响其功能完整性,并且使得mbc完全或部分分离。部分分离可能会使产品从外侧或内侧进入mbc的内部结构,从而导致腐蚀或阻止预期的功能。mbc可以具有附接到其的浮动单元,或者mbc可以设计为中立型浮筒。如果浮动单元损坏,或中立型浮筒受到例如海洋生物或相邻柔性区段的影响而无法提供足够的浮力,则mbc可能会下沉并将整个卸载管柱拉入大海,这种事件称为自动淹没。因此,有必要定期检查mbc,通常通过使用工作船、潜水员、rov进行物理检查,甚至将mbc物理移除然后在陆上检查。此类检查会中断海上作业,并且可能非常昂贵,因此有时不会执行。检查的频率目前不是基于科学,而是依赖于制造商的建议或事故发生后才进行检查。在确定mbc的使用寿命方面也采用了相同的方法。
6.装载操作完成后,卸载管柱中的产品温度可能会降低,从而导致产品收缩并产生真空,这可能是灾难性的,特别是在海底系统的情况下。真空可能会干扰系统的设计构造,从而导致海底卸载管柱的潜在过载和mbc的启动(如果一个mbc到位)。
7.mbc可以随时启动,通常启动的50%的原因是已知的,其余原因是未知的,可能是
由于事故、操作问题或mbc自身的功能。在任何情况下,启动的确切负载和条件都是未知的,这使得根本原因分析极其困难。
技术实现要素:
8.本发明提供了一种用于卸载管柱的分离式联轴器,该联轴器包括:两个本体部分,每个本体部分设置成连接到相应的管柱区段,两个本体部分可分离地连接在一起;移动感测装置,设置成感测两个本体部分相对于彼此的移动;以及传输装置,设置成响应于对相对移动的感测而传输分离信号。
9.该系统还可以包括连接到移动感测装置和传输装置的处理装置,并且该处理装置设置成从移动感测装置接收启动信号,并且输出分离信号以供传输装置传输。
10.移动感测装置可以包括设置成响应于移动而闭合的开关。
11.该系统还可以包括电源,并且开关可以设置成响应于移动将传输装置连接到电源。
12.移动感测装置还可以包括设置成响应于移动而闭合开关的磁体。可替代地,可以使用其他启动机制,例如,可以设置成以响应于移动而使开关闭合的物理链接(诸如线),或该移动者可以设置成可以断开能触发传输分离信号的电路。
13.另外,或可替代地,移动感测装置可以包括设置成测量两个联轴器部分在一距离范围内的相对移动的无线测距系统。
14.处理装置、电源和移动感测装置可以形成分离节点的至少一部分,该分离节点可以设置成在联轴器部分处于完全联接状态时保持在未启动模式,并且通过联轴器部分的分离而启动。在这种情况下,移动感测装置可以设置成在检测到移动时触发分离信号,并且还可以启动分离节点,由此可以进一步通过无线测距系统测量联轴器的两个部分的相对移动。
15.该系统还可以包括监测节点和至少一个监测传感器。监测节点可以包括处理装置和传输装置,并且监测节点可以设置成在联轴器处于完全联接状态时从至少一个传感器接收输入并且传输源自输入的监测数据。
16.无线测距系统可以包括形成分离节点的一部分的第一收发器和形成监测节点的一部分的第二收发器。
17.该系统还可以包括至少一个监测传感器。处理装置可以设置成从至少一个传感器接收信号,处理装置可以设置成分析信号以确定何时满足故障条件。处理装置可以设置成在满足故障条件的情况下生成故障指示输出。
18.处理装置可以安装在联轴器上,例如形成安装在联轴器中的节点的一部分,或者该处理装置可以包括安装在联轴器的两个或多个节点中的每个节点上的一个处理器。实际上,处理装置的至少一部分可以位于远离联轴器的位置,例如在浮标上或陆地上,并且原始数据可以被传输到该远程位置进行处理。
19.该系统可以包括设置成接收船舶跟踪信号并将来自船舶跟踪信号的数据储存为船舶移动记录的接收器。接收器可以包括传输装置,例如形成收发器单元,或者可以包括单独的接收器。接收器可以与移动感测装置或传输装置在同一节点上,或者可以在单独的节点上。船舶移动记录可以包括船舶的身份和位置中的至少一个连同相关时间。该系统可以
设置成在联轴器分离时传输来自船舶移动记录的数据,例如响应于对相对移动的感测。
20.本发明还提供了一种海洋分离式联轴器系统,包括联轴器、处理装置和至少一个监测传感器,其中处理装置设置成从至少一个监测传感器接收信号,分析信号以确定何时满足故障条件,并且在满足故障条件的情况下生成故障指示输出。
21.至少一个监测传感器可以包括设置成测量联轴器中的应力的应力传感器,或者设置成测量联轴器中相应的多个位置处的应力的多个应力传感器。
22.处理装置可以设置成储存应力的采样值,并且故障条件限定为应力值的预定变化。
23.至少一个传感器可以包括设置成检测水进入联轴器中的湿度传感器。
24.处理装置可以包括:第一处理器,设置成安装在联轴器上;第二处理器,设置成安装在远离联轴器的网关节点中。处理装置还可以包括:通信装置,设置成能够在第一处理器和第二处理器之间传输数据。第二处理器可以设置成在预定时间从第一处理器接收数据,并且确定这些数据是否在预定数量(例如两次或三次)的预定时间未成功传输。作为响应,第二处理器可以设置成生成浸没警告信号。
25.本发明还提供了一种用于卸载管柱的海洋分离式联轴器的状态监测系统,该监测系统包括:监测节点,设置成安装在联轴器上,该监测节点设置成监测联轴器的状态并且传输预定次数的状态指示信号;以及另一节点,设置成远离联轴器定位并且在预定时间接收状态指示信号,其中另一节点还设置成确定这些状态指示信号是否在预定数量的预定时间未成功传输,并且作为响应,生成浸没警告信号。
26.监测节点可以设置成将状态指示信号无线地传输到另一节点。
27.另一节点可以是设置成将另一状态指示信号传送到中央枢纽的网关节点。
28.监测节点可以是第一监测节点,并且该系统还可以包括第二监测节点,第二监测节点设置成在与第一监测节点不同的位置处安装在海洋分离式联轴器上。第二监测节点可以设置成以与第一监测节点相同的方式操作。第二监测节点可以设置成如果第一监测节点在水下,则向另一节点传输状态指示信号。该系统还可以包括第三监测节点。可以为至少三个监测节点的监测节点可以围绕mbc的中央轴线基本上等距地间隔开。
附图说明
29.图1是根据本发明的实施方式的海洋分离式联轴器的侧视图;
30.图2是图1中的mbc处于分离状态的立体图;
31.图3是图1中的mbc的截面图;
32.图4是图1中的mbc处于部分分离状态的截面图;
33.图5至图8示出了图1中的mbc处于不同的分离度的视图;
34.图9是图1中的联轴器的两个节点单元的俯视图;
35.图10示出了图6中的节点单元中的一个节点单元在图1中的mbc中的位置;
36.图11是包括图1中的mbc的输油系统的示意图;
37.图12是包括图1中的mbc的另一个输油系统的示意图;
38.图13是形成图11中的系统的一部分的网关节点的示意图;以及
39.图14是示出了图11中的系统的浸没检测功能的操作的流程图。
具体实施方式
40.参考图1和图2,海洋分离式联轴器100包括第一部分101和第二部分102。每个联轴器部分101、102包括基本上柱形的本体部分103、104,这两个本体部分具有在一个端部处的联轴器法兰106、108和在另一个端部处的连接法兰110、112,并且限定了产品(诸如油、气或其他碳氢化合物)可以从中流过的管道。两个联轴器法兰106、108设置成通过多个断开式螺栓(break-bolt)114保持彼此接触。断开式螺栓114设置成在预定应力下断开,以便提供联轴器的分离功能。每个连接法兰110、112设置成用于连接到相应的管柱区段(诸如柔性软管区段),每个连接法兰例如通过具有穿过其形成的一系列螺栓孔115,使螺栓可以穿过该螺栓孔以进行连接。第一联轴器部分101在柱形本体部分103的外表面上具有一系列轴向延伸的肋部105,第二联轴器部分102在柱形本体部分104的外表面上具有一系列轴向延伸的肋部107。
41.还参考图3和图4,套筒116从第一本体部分的连接法兰110延伸穿过两个本体部分103、104至第二本体部分的连接法兰112。该套筒116形成管道的衬里,当联轴器处于其联接状态且两个联轴器部分101、102牢固地彼此紧固时,产品在该管道中流过。
42.参考图3和图4,如果mbc是花瓣型阀,则每个联轴器部分101、102包括花瓣型阀120、122,该花瓣型阀设置成在两个本体部分101、102彼此分开时使管道闭合。这些花瓣型阀120、122中的每个花瓣型阀都包括一组阀瓣(petal)124,该组阀瓣可枢转地安装在相应的本体部分103、104中并且可以在打开位置(如图3所示)与闭合位置(如图2所示)之间移动,在该打开位置中这些阀瓣允许流体流过管道,在该在闭合位置中这些阀瓣闭合并密封管道。每个阀瓣124的闭合由弹簧126和液压阻尼器128控制,其中该弹簧将阀瓣推向其闭合位置,并且该液压阻尼器用于控制阀瓣朝向其闭合位置的移动速率。这些可以设置以便控制和协调阀瓣124闭合的时机。
43.当联轴器处于如图5所示的联接状态时,套筒116将两个花瓣型阀120、122的阀瓣124都保持在它们的打开位置。在如图6所示的断开式螺栓114断开且两个联轴器区段开始分开的情况下,套筒116滑出一个本体区段103,同时通过环形密封件130保持密封,直到套筒116完全离开阀瓣124,然后阀瓣在弹簧126和阻尼器128的控制下旋转直到这些阀瓣闭合并密封穿过第一联轴器区段101的管道。然后,在图7所示的位置,套筒116从第一联轴器区段101的进一步移出是通过套筒116的加厚端部区段117与第一联轴器区段101的本体部分103内侧上的面向内脊部132接触而阻止。然后,在两个联轴器部分101、102进一步远离彼此移动时,套筒116滑出第二联轴器部分102,从而允许第二花瓣型阀122闭合并密封穿过第二联轴器部分102的管道。然后在进一步移动时,如图8所示的套筒116被完全拉出第二联轴器部分102,然后分离完成。
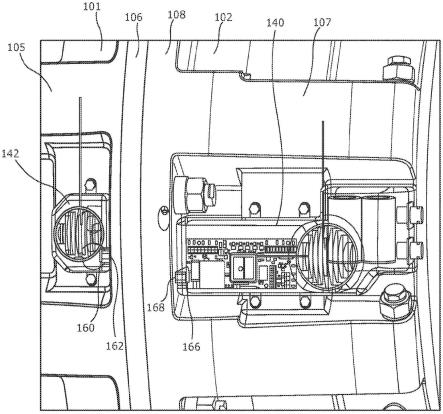
44.参见图9,mbc的监测系统包括主监测节点140和分离监测节点142。主节点和分离节点可以各自安装在联轴器部分101、102中的任一个上,但是其中一个节点可以安装在一个联轴器部分上且另一个节点安装在另一个联轴器部分上,使得两个联轴器部分的相对移动引起两个节点140、142的相对移动。这可以用于检测mbc的分离。如图9所示,节点140、142可以用螺栓固定在联轴器部分101、102的本体,但可替代地,也可以通过带或夹套附接到联轴器部分101、102,或者整合到附接到联轴器的浮动单元中。
45.主监测节点140包括:处理器144;多个传感器146;调制解调器148和天线147,用于
与另一节点(例如,位于浮标上的网关节点)进行无线电通信,以用于前向传输和分析;短程收发器149,用于与分离节点142进行通信;以及电源150,该电源通常是电池形式。电池可以是可充电的,例如使用来自安装在管柱上的适当位置处的太阳能电池板的太阳能。此外,电源可以在节点外部并且连接到节点,以向节点供电。天线147的一部分以及例如用于短程通信的其他天线和也可以设置在两个节点140、142中的一个中的gps单元都容纳在保护圆顶151内。节点之间的短程通信可以是也允许节点测量和监测两个节点之间的距离的超宽带(uwb)通信,或者任何其他合适类型的通信。多个传感器146中的至少一些传感器可以位于联轴器上的不同位置处并且连接到节点140。传感器146设置成感测联轴器100的各种操作和健康或状态参数,特别是流过联轴器的产品。它们可以包括以下的一者或多者:温度传感器,设置成感测流过联轴器的产品的温度;压力传感器,设置成测量流过联轴器的产品的压力;一个或多个负载传感器,设置成测量联轴器上的一个或多个位置处的负载;以及用于检测mbc的内部结构内的是否存在任何产品的传感器。用于监测产品的传感器通常至少在一定程度上远离节点140并且电连接到该节点。然而,传感器可以整合到节点140中,并且借助于感测管道或通道通过联轴器连接到主产品管道,使得传感器可以通过监测感测管道或通道里的产品来间接监测主产品管道中的产品。
46.分离监测节点142包括:处理器152;多个传感器154,设置成检测联轴器100的各种操作参数;调制解调器156和天线155,用于与另一节点(例如位于固定点(例如浮标、fpso、fso、塔或陆地)上的网关节点)进行无线通信,用于前向传输和分析;短程收发器157,用于与主监测节点140通信;以及电源158,该电源以电池形式。天线155的一部分以及例如用于短程通信的任何其他天线和gps都容纳在保护圆顶159内。形成分离节点142的一部分或连接到该分离节点的传感器154可以对应于主节点140的那些传感器146,但是可以包括与分离监测具体相关的其他传感器。
47.在一些情况下,主监测节点140和分离监测节点142可以共享它们的传感器146、154中的一个或多个,从而减少系统的部件数量。例如,如果两个节点140、142都安装在相同的联轴器部分101或102上,那么这将是简单的。然而,如果主监测节点和分离监测节点各自位于不同的联轴器部分上,如果这些传感器中的一个或多个无线连接到这些节点中的一个,则传感器可以无线连接到主监测节点和分离监测节点两者。此外,如果在联轴器部分101、102中的一个联轴器部分上设置了多于一个的主监测节点140,则它们可以共享一个或多个公共传感器,并且类似地,如果在联轴器部分101、102中的一个联轴器部分上设置了多于一个的分离监测节点142,则它们可以共享一个或多个公共传感器。
48.分离节点142还包括移动传感器160,该移动传感器设置成检测两个联轴器区段101、102彼此远离的相对移动。该移动传感器160包括舌簧开关,该舌簧开关设置成当联轴器处于完全联接状态时由磁体162保持打开,但在联轴器部分分离时闭合。舌簧开关160可以设置成将电源158连接到处理器152,使得舌簧开关160的闭合来关闭电源158和处理器之间的连接,这可以启动处理器152以启动分离节点142。例如,磁体162可以包括磁杆,并且可以通过杆162上的螺纹部分164安装在联轴器部分101的法兰中(即联轴器中未安装分离节点的部分中),并且磁体延伸穿过另一联轴器部分102的法兰中的孔。
49.类似地,主监测节点140可以包括舌簧开关166形式的移动传感器,该舌簧开关靠近磁杆168安装,该磁杆通过螺纹部分170安装在第二联轴器部分102的法兰中并延伸穿过
另一联轴器部分101的法兰中的孔。主节点140中的舌簧开关166设置成向处理器144提供例如来自电池150的输入,使得处理器144可以检测两个联轴器部分101、102的部分分离。来自电池150的输入是除了电池150和处理器144之间的主电源连接之外的。
50.图9示出了当舌簧开关160、166和磁杆162、168全部在联轴器部分101、102中安装到位时它们的位置。如图10所示,如果主节点140安装在第二联轴器部分102上,则其定位成使得舌簧开关166位于接近第二联轴器部分102的联轴器法兰108。控制舌簧开关166的操作的磁杆168安装在第一联轴器部分101的联轴器法兰106中,但延伸穿过第二联轴器部分102的联轴器法兰108中的孔口,使得该磁杆的端部靠近舌簧开关166。类似地,如果分离节点142安装在第一联轴器部分101上,则其定位成使得舌簧开关160靠近第一联轴器部分102的联轴器法兰106定位。控制该舌簧开关160的操作的磁杆162安装在第二联轴器部分102的联轴器法兰108中,但延伸穿过第一联轴器部分101的联轴器法兰106中的孔口,使得该磁杆的端部靠近舌簧开关160。
51.移动传感器可以包括除了舌簧开关和磁体组合以外其他的开关或传感器。例如,它们可以包括安装在连接法兰106、108中的压力开关或接触开关,该开关可以检测这些法兰的轻微分离,或者两个联轴器部分101、102之间的电连接,该电连接设置成在联轴器部分分离时断开。
52.两个节点140、142位于相应的联轴器部分102、101上,使得当联轴器处于其完全联接状态时,舌簧开关162、168都通过来自磁杆164、166的磁场保持打开。合适的安装位置例如如图10所示。应当注意,图10中所示的节点的形状与图9中的节点的形状不同,但是应当理解,图9中的节点140、142可以安装在与图10中的节点相同的位置。
53.节点140、142在联轴器部分102、101上的位置选择为保护节点140、140免受物理损坏。特别地,主监测节点140位于第二联轴器部分102上的肋部107中的两个肋部之间的凹部中,并且分离监测节点142位于第一联轴器部分101上的肋部105中的两个肋部之间的凹部中。分离节点和主节点中的天线被升起以能够与网关节点自由通信,并且在这种意义下被保护在抗冲击柔性圆顶151、159内。这些圆顶151、159的柔性和抗冲击性可以以不同的方式控制,例如通过形成泡沫夹层、由一层或多层芳纶覆盖以及耐臭氧/抗紫外线橡胶或聚氨酯的最终层。这样的结构可以是弹性的,使得其在受力之后恢复其原始形状。在海洋环境中,预计会有海洋生物,这可能会影响节点之间以及节点与网关之间的通信。因此,圆顶151、159上的最终层,以及实际上整个节点140、142上的最终层,可以是阻止海洋生物生长类型的。
54.参考图11,联轴器100可以位于浮动卸载管柱200中,该浮动卸载管柱例如在fpso 202和calm浮标204之间连接。如上所述的网关节点206位于浮标204上。当联轴器100位于浮动卸载管柱200中时,该联轴器通常部分浸没在水中。然而,重要的是主节点140和分离节点142没有在水中,使得它们能够与网关节点206通信。该问题的一个解决方案是围绕联轴器100的外周放置多个节点,使得无论联轴器在水中的定向如何都将有至少一对相关联的主节点140和分离节点142不在水中。例如,返回参考图2,如果联轴器的每个部分具有八个纵向肋部105、107,那么四对节点140、142可以围绕联轴器的中心轴线等距离间隔开。对于其他联轴器设计,三对节点可以围绕联轴器间隔开。
55.在正常操作期间,主节点140是启动的,并且主节点140的处理器144设置成以规则
的间隔对来自传感器146的信号进行采样,以获得与感测的参数(诸如油温和油压、联轴器中的负载以及使用gps单元确定的联轴器位置)相关的数据,并且经由调制解调器148将该数据传输到网关节点。这在常规通信周期中以定期间隔重复,例如每十分钟或每十五分钟重复一次,或以与操作团队商定的速率。
56.分离监测节点142通常是未启动的,舌簧开关162由磁体164保持打开,使得电源158与处理器152断开。这确保不从电池158汲取电力,因此能够起作用并捕捉分离的瞬间。然而,如果联轴器的两个部分101、102开始分离,例如分离超过约1mm、5mm或10mm,则舌簧开关162闭合,将处理器152连接到电源158,以启动分离监测节点140。一旦启动,分离节点设置为经由无线电通信链路开始直接向网关节点206传输数据。该数据包括联轴器100已经发生部分或完全分离的警报,以及从传感器154获得的与联轴器的状态和流过联轴器的油或气体有关的数据。该数据可以以规则的间隔且比主节点140的正常操作期间的频率高得多的频率传输,这是因为对主节点140重要的保存电池电量的要求不适用于分离节点142。具体地,该数据可以包括指示联轴器中流体的温度的流体温度数据、指示联轴器中流体的压力的流体压力数据、指示在联轴器中的特定点处的负载的联轴器负载数据。一旦启动,分离节点142也可以经由短距离uwb收发器开始与主节点140通信。它们可以测量两个节点140、142之间的距离,从而提供无线测距功能,并且因此可以提供指示两个联轴器部分101、102的相对位置的相对位置数据。这提供了两个联轴器部分的分离程度的指示。该相对位置数据可以由分离节点142与其他数据一起传送至网关节点206。
57.分离节点142可以提供与联轴器的分离相关的所有数据以供传输,并将其传输到网关节点206。然而,由于主节点140也具有舌簧开关形式的分离传感器,所以主节点140也可以配置为检测联轴器的部分分离,并配置为进入分离模式,在该分离模式中,主节点执行除其正常执行的功能之外或与正常执行的功能不同的功能。例如,在分离模式中,主节点140可以设置为经由短程收发器149、157与分离节点通信,使得分离节点142可以在发生分离期间当两个节点移动分开时测量两个节点之间的距离。
58.主监测节点140的另一功能是监测mbc 100在其生命周期内的状态,并检测在其状态中的指示mbc 100需要维修或更换的任何恶化。为了做到这一点,在mbc上设置了多个其他传感器,这些其他传感器设置成测量mbc的各种参数,并且这些其他传感器连接到主监测节点的处理器144。例如,返回参考图4,这些其他传感器可以包括设置成测量套筒116中的应力的应力传感器180,以及设置成检测套筒116和联轴器本体103、104之间的空间中的湿度的湿度传感器182。参考图2,应力传感器184可以设置在每个断开式螺栓114中。
59.应力传感器通常测量它们安装在其上的部件中的应变,从而提供该部件中应力水平的测量。每个部件通常可以在任何点处承受高达极限值的应力(或应变),而不会受到过度损坏,但超过该极限值的应力往往会对部件造成永久损坏。因此,处理器144设置成以规则的采样率对来自每个应力传感器的信号进行采样,使得系统可以随时间监测应力。该处理可以在监测节点140本地完成,或者传感器数据可以经由无线电通讯链路传输以用于在其他地方(例如在中央枢纽处)分析。如果分析是在本地进行的,对于每个应力传感器180、184,处理器144可以设置成储存应力的采样值并监测所测量的应力随时间的变化,这可以包括确定平均值和变化的度量,诸如标准偏差。然后如果在任何时候应力的变化距平均值而言超过极限值,诸如标准偏差的三倍或四倍,则处理器设置为确定故障状态已经发生并
生成指示联轴器需要维修或检查的警告信号。类似地,如果湿度传感器182检测到套筒116和联轴器本体103、104之间的湿度,则处理器144也设置为确定故障状态已经发生并产生警告信号。如果分析是远程进行的,则分析可以是相同的,但不是经由无线电通信链路传输警告信号,而是以规则的间隔传输传感器数据,并且执行分析,并且在远离联轴器(例如在网关节点处或在陆地上的监测站处)的位置生成警告信号。
60.应理解,可以在联轴器中的多个不同位置处测量应力,并且这些位置中的任何一个位置处的应力可以是充足的以满足故障条件并触发警告信号,或者故障条件可以限定为只有至少两个或至少三个应力传感器指示应力高于极限值时才满足。这在监测系统中提供了一定程度的冗余,但也确保了仅影响联轴器的一小部分而不影响其整体有效性的孤立事件不会触发警告信号。
61.类似地,可以在联轴器中的不同位置处设置两个或多个湿度传感器,并且故障条件限定为只有两个或所有传感器检测到湿度才满足。
62.返回参考图11,该系统还可以设置为检测卸载管柱200的部分或全部的自动浸没。例如,在卸载管柱200在fpso 202和calm浮标204之间延伸的情况下,例如由于浮动管柱200的浮力失效、过多的海洋生物将管柱压下或者通过管柱泵送异常稠密的流体,卸载管柱的一部分或全部可能会浸没。在这种情况下,管柱200将下沉以形成袋(sack)200’,同时其端部保持连接到fpso 202和浮标204。参考图12,如果卸载管柱200a用于将calm浮标204连接到油轮205,那么当油轮205与管柱200b断开连接时,管柱200c可以自动浸没到浸没位置200a’,同时mbc 100下沉到位置100”。在一些情况下,卸载管柱200a也可能与calm浮标204分离,在这种情况下,管柱的整个长度可能完全浸没并下沉。
63.参考图13,网关节点206还包括:处理器220,连接到其自身电源222;无线电收发器224和无线电天线226,用于与主监测节点140和分离节点142通信;以及另一个无线电发射器228,用于经由卫星或其他合适的装置将信号和数据从联轴器100上的节点到中央枢纽的前向通信。处理器220设置为在每个通信周期中协调与主监测节点140的通信,并且还在网关节点从分离节点接收到指示其已启动的分离信号的情况下协调与分离节点142的通信。在与主监测节点140通信期间,网关节点206或监测节点140将启动通信周期,两个节点将建立链接,并且监测节点140向网关节点传送数据和/或任何警告或状态指示信号。网关节点206中的处理器220包括内部时钟,因此处理器可以确定是否在一个或多个通信周期的预期时间内未建立与监测节点140的通信。这可用于检测mbc的浸没。
64.网关节点206的无线电收发器224或网关节点206上的单独的专用接收器还可以设置为接收从附近的船舶传输的船舶跟踪信号。众所周知,船舶使用自动识别系统(ais)信号来传送船舶跟踪数据,诸如其身份和位置。因此,网关节点206可以设置为接收和记录船舶跟踪数据,以便为在网关节点的预定距离内的任何船舶形成船舶移动记录,该船舶移动记录可以包括例如船舶身份和与时间相关的位置。然后,在网关节点206接收到来自分离节点142的分离信号时,网关节点上的处理器220设置为将来自船舶移动记录的数据与正在传输的其他数据一起传输到中央枢纽。这使得能够识别可能引起联轴器分离的任何船舶。在可替代的设置中,分离节点142或监测节点140可以设置为使用专用接收器或上述收发器接收和储存船舶跟踪数据,并且设置为在检测到联轴器的分离时将这些船舶跟踪数据与其他数据一起传送到网关节点206。
65.与来自监测节点140的传感器数据一样,可以从接收器连续地传输船舶跟踪数据,在接收器处船舶跟踪数据被向前接收以用于分析和/或储存。例如,如果在监测节点140处接收船舶跟踪数据,则船舶跟踪数据可以经由网关节点206与其他传感器数据一起被传输到中央枢纽,而不管是否检测到联轴器的任何分离。如果在网关节点206处接收船舶跟踪数据,则船舶跟踪数据可以再次被向前传输到中央枢纽,以便在从监测节点140接收到其他传感器数据时与其他传感器数据的常规传输一起进行储存和分析,或者在单独的常规通信中进行储存和分析。在接收到分离信号时,然后可以在中央枢纽处执行对哪些船舶可能导致了联轴器的任何分离的分析。例如,该系统可以设置为从跟踪数据中识别在从联轴器分离起的预定时间内处于与联轴器相关联的预定区域(诸如在联轴器的预定距离内)内的任何船舶。例如,在检测到联轴器分离之前或之后的一小时或两小时内,距离联轴器一海里或两海里或者一百米或二百米范围内的任何船舶。可替代地,该分析可以在网关枢纽206处或者甚至在监测节点140处执行。
66.参考图14,在一个实施方式中,监测节点142和网关节点206设置为使用多个步骤在一系列通信周期中进行通信。在步骤300处,监测节点使用其内部时钟确定自上一个通信周期开始所需的时间已经过去,因此是时候开始下一个通信周期。然后,在步骤302处,监测节点与网关节点206交换握手信号,例如通过传输握手信号并作为响应接收一个握手信号。在成功交换握手信号时,在步骤304处,监测节点向网关节点206传输数据,例如警报信号或原始信号数据。然后监测节点返回到步骤300以等待下一个通信周期的开始。在步骤300a处,网关节点使用其内部时钟确定自上一个通信周期开始所需的时间已经过去,因此是时候开始下一个通信周期。然后在步骤302a处,网关节点与监测节点142交换握手信号,例如通过从监测节点142接收握手信号并作为响应发送一个握手信号。如果握手信号交换成功,则它进行到步骤304a,在该步骤中网关节点从监测节点142接收数据,然后进行到步骤306a,在该步骤中网关节点将该数据重新传输到中央枢纽以供审查或分析。然而,如果在步骤302a处,网关节点确定握手没有成功,则网关节点在步骤308a处记录失败的通信周期,例如通过将失败周期的计数器增加1。然后在步骤310a处,网关节点检查是否有预定数量(诸如三个或两个)的连续通信周期失败。如果没有,则返回步骤300a以等待下一个通信周期的开始。然而,如果它们已经失败,则然后在步骤312a处,网关节点确定卸载管柱可能已经发生了自动浸没,并且向中央枢纽传输警告信号,该警告信号可以警告系统的操作员卸载管柱可能已经浸没并且需要注意。
67.应当理解,在其他实施方式中对自动浸没的监测可以变化。例如,可能不存在经由握手信号的通信的初始建立,并且网关节点可以简单地等待以固定的时间间隔接收数据,并且在其未在预期时间接收数据的情况下,其可以记录通信失败。
68.返回参考图11,联轴器100a可以连接到水下软管210中。在这种情况下,与网关节点206的无线电通信将是不可能的,而是提供了将节点连接到网关节点206a的脐带212,在这种情况下脐带示为位于fpso 202上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1