多滚轮式行星牵引减速器
1.本发明涉及减速器技术领域,特别涉及一种多滚轮式行星牵引减速器。
背景技术:
2.高转速、大速比的减速器广泛的应用于各领域,例如应用于机器人关节、新能源汽车等领域;例如在新能源电动汽车方面,由于汽车电机转速越来越高,远高于传统的发动机转速,若在电动汽车上使用传统的齿轮传动减速器则存在振动噪声大,成本高等问题。
3.因此,为解决以上问题,需要一种多滚轮式行星牵引减速器,提出一种能够同时实现大速比、零自旋和自适应加载的牵引减速器方案。在满足大速比传动的同时,零自旋也能最大程度的减少功率损耗,提高传动精度和传动效率。自适应加载可根据负载大小进行自动加载调节,优化接触区域的载荷,提高牵引减速器寿命。
技术实现要素:
4.有鉴于此,本发明提供一种多滚轮式行星牵引减速器,提出一种能够同时实现大速比传动、自适应加载牵引减速器方案;在满足大速比传动的同时,可根据负载大小进行自动加载调节,提高牵引减速器寿命,降低了振动和装配精度要求。
5.有鉴于此,本发明提供一种多滚轮式行星牵引减速器,提出一种能够同时实现大速比、零自旋和自适应加载的牵引减速器方案;在满足大速比传动的同时,零自旋和自适应加载的设计提高了牵引减速器的传动寿命、效率和精度。滚轮自由浮动的设置也降低了加工和装配精度的要求。
6.进一步,最外层所述行星滚轮包括滚轴、凸出于滚轴外圆的左滚动部以及右滚动部,所述左滚动部外圆与外圈内圆形成滚动摩擦副,所述右滚动部外圆与相邻层的行星滚轮外圆形成滚动摩擦副,所述自适应加载机构自适应对滚轴靠近左滚动部一侧加载径向向外的作用力以使得左滚动部外圆与外圈内圆之间形成滚动摩擦副所需要的正压力,所述自适应加载机构自适应对滚轴靠近右滚动部一侧加载径向向内的作用力以使得右滚动部与相邻层的行星滚轮外圆之间形成滚动摩擦副所需要的正压力。
7.进一步,所述行星架包括连为一体的左部行星架和右部行星架,所述自适应加载机构为设置于左部行星架上径向向外开口的左v型槽以及设置于右部行星架上径向向内开口的右v型槽,所述滚轴的左端部位于左v型槽内,所述滚轴的右端部位于右v型槽内。
8.进一步,所述行星滚轮设置有三层分别为内层行星滚轮、中层行星滚轮以及外层行星滚轮,所述内层行星滚轮为十字滚轮,所述中层行星滚轮为工字型滚轮,所述内层行星滚轮的大径外圆与太阳轮外圆形成滚动摩擦副,所述内层行星滚轮的左右两处小径外圆与中层行星滚轮的左右两处大径外圆分别形成两处滚动摩擦副,所述中层行星滚轮的小径外圆与外层行星滚轮的右滚动部外圆形成滚动摩擦副。
9.进一步,所述滚轴的两端分别安装有滚轮轴承,两个所述滚轮轴承分别安装于左v型槽和右v型槽内。
10.进一步,各层行星滚轮在轴向和径向方向浮动设置。
11.进一步,所述左部行星架和右部行星架通过行星架轴承安装于外壳内圆,所述左部行星架为圆盘形结构,所述左v型槽开设于左部行星架外圆,所述左v型槽与相应的行星架轴承内圈之间形成用于安装相应滚轮轴承的左部安装位,所述滚轴左端对应的滚轮轴承以径向和轴向浮动的方式安装于左部安装位内,所述右部行星架为环形结构,所述右v型槽开设于右部行星架的内圆处,所述外壳右部盖有右端面挡板,所述右端面挡板内侧具有轴向凸出形成的外盘,所述外盘伸至右部行星架内圆,所述外盘外壁与右v型槽之间形成用于安装相应滚轮轴承的右部安装位,所述滚轴右端对应的滚轮轴承以径向和轴向浮动的方式安装于右部安装位内。
12.进一步,所述太阳轮与内层行星滚轮之间以及内层行星滚轮与中层行星滚轮之间为线接触方式,所述中层行星滚轮与外层行星滚轮之间以及外层行星滚轮与外圈之间为点接触方式。
13.进一步,所述太阳轮包括相互传动配合的左太阳轮和右太阳轮,所述左太阳轮以轴向浮动且转动配合的方式安装于左部行星架上的安装孔内,所述右太阳轮以轴向浮动且转动配合的方式安装于外盘上的安装孔内。
14.进一步,所述左滚动部的外径小于右滚动部的外径,所述外圈一体成型凸出于壳体的内壁。
15.本发明的有益效果:
16.本发明中的减速器,是一种小型化、高速化、轻量化、集成化的多滚轮式行星牵引减速器方案,具有大速比、大刚度、高效率、高承载能力及零侧隙超高精度传动等优点;适用于体积要求小、传动要求平稳、空间结构紧凑、静谧低振追求的精密传动场合,如机器人一体化关节、微小步距进给精密定位装置、室内或特种器械、微重力操作机械、高速机械以及电动汽车等领域。得益于牵引传动具有高速平稳性能,故可采用高速电机以降低电机尺寸,提高系统功率密度,从而实现电气小型化设计。此外,该减速器不需要复杂的专用加工设备,各零件自定心故对安装误差不敏感,工艺性好,成本低,且产品一致性高,工程化实现较为简单,易于流水线大批次生产。
附图说明
17.下面结合附图和实施例对本发明作进一步描述。
18.图1为本发明结构示意图;
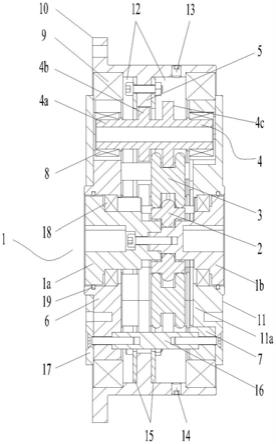
19.图2为图1的a-a剖视结构示意图;
20.图3为爆炸结构示意图;
21.图4为各层行星滚轮配合结构示意图;
22.图5为自适应加载机构加载原理示意图;
具体实施方式
23.如图所示:本实施例的多滚轮式行星牵引减速器,包括由太阳轮1、从内至外依次布置的若干层行星滚轮、外圈5和行星架构成的行星牵引传动轮系以及自适应加载机构,所述最外层的行星滚轮转动配合安装于行星架上,太阳轮与最内层行星滚轮之间、相邻各层
行星滚轮之间以及最外层行星滚轮与外圈之间形成滚动摩擦副配合,此处的滚动摩擦副配合可以为相邻部件的之间直接接触形成摩擦传动配合,也可以通过添加牵引油,使得相邻部件的之间通过油膜形成摩擦传动配合;所述自适应加载机构设置于行星牵引传动轮系内用于自适应调节各层行星滚轮、太阳轮以及外圈之间的法向载荷。
24.自适应加载的含义为依据多滚轮式行星牵引减速器的运行工况自动调节各层行星滚轮、太阳轮以及外圈接触区域的法向载荷,使其产生所需的切向力;通过自适应加载机构实现各层行星滚轮之间以及行星滚轮与太阳轮以及外圈之间接触区域联动自适应加载;
25.太阳轮中心线与行星架轴线共线,太阳轮通过键槽或法兰盘与输入轴传动配合;各层行星滚轮分别沿太阳轮周向均布,各级层行星滚轮与太阳轮轴线互相平行以实现零自旋传动,采用多级行星滚轮以实现大速比,满足高转速的应用工况;各层行星滚轮以过盈配合的方式安装于太阳轮与外圈之间,且各层行星滚轮、太阳轮以及外圈之间自由浮动,依靠互相接触来确定空间位置,并通过接触区域内的牵引力或摩擦力传递功率;用于产生启动或低负载时所需要的初始正压力;再由自适应加载机构根据实际负载的情况进行自动调压,保证传动时在各接触区域内产生合适且足够的压紧力,防止打滑,从而提高传动效率以及使用寿命。
26.传动时,在外圈固定的情况下,动力通过与输入轴相连的太阳轮输入并驱动各级行星滚轮自转并公转,最后通过最外层的行星滚轮驱动行星架转动输出功率。当行星架固定时,动力通过太阳轮驱动各级行星滚轮自转,通过最外层行星滚轮驱动外圈输出功率;
27.该结构的减速器能够同时实现大速比、零自旋和自适应加载;在满足大速比传动的同时,零自旋也能最大程度的减少功率损耗,提高传动精度和传动效率,自适应加载可根据负载大小进行自动加载调节,防止打滑,从而提高传动效率和减速器寿命,实现平稳运转。
28.本实施例中,最外层所述行星滚轮包括滚轴4a、凸出于滚轴外圆的左滚动部4b以及右滚动部4c,所述左滚动部4b外圆与外圈内圆形成滚动摩擦副,所述右滚动部4c外圆与相邻层的行星滚轮外圆形成滚动摩擦副,所述自适应加载机构自适应对滚轴4a靠近左滚动部4b一侧加载径向向外的作用力以使得左滚动部4b外圆与外圈内圆之间形成滚动摩擦副所需要的正压力,所述自适应加载机构自适应对滚轴4a靠近右滚动部4c一侧加载径向向内的作用力以使得右滚动部4c与相邻层的行星滚轮外圆之间形成滚动摩擦副所需要的正压力。
29.依据减速器运行工况的不同,可对滚轴4a实现自适应的加载,该加载不需要借助外力进行,而是依据运行工况自主进行;将最外层行星滚轮设置为左滚动部4b以及右滚动部4c,是为了配合自适应加载机构,结合图5所示,滚轴4a左端受到自适应加载机构径向向外的作用力使得左滚动部4b压紧于外圈上,滚轴4a右端受到自适应加载机构径向向内的作用力使得右滚动部4c压紧于中层行星滚轮3上,相应的中层行星滚轮3径向向内压紧内层行星滚轮2且内层行星滚轮2径向向内压紧太阳轮,进而根据负载自动调节各层行星滚轮与相应传动部件之间的正压力;
30.由于各层行星滚轮初始即为过盈配合的关系,在初始阶段下各层行星滚轮具有初始预紧力,故在自适应加载过程中,滚轴4a两端根据负载只需要发生微量位移和偏斜即可有效的调节各层行星滚轮接触区域所需要的正压力,其微量位移和偏斜程度受各接触区域
弹性变形的影响保持在um级,宏观下各层行星滚轮的轴线仍然保持平行,因此对滚轴4a的加载作用几乎不会影响各层行星滚轮的运行。
31.本实施例中,所述行星架包括连为一体的左部行星架6和右部行星架7,所述自适应加载机构包括设置于左部行星架上径向向外开口的左v型槽以及设置于右部行星架上径向向内开口的右v型槽,所述滚轴4a的左端部位于左v型槽内,所述滚轴4a的右端部位于右v型槽内。
32.左部行星架6和右部行星架7通过连接柱连接,结合图2至图5所示,当运行工况的负载与压紧力不匹配时,在反作用力矩作用下滚轴4a两端受到左v型槽和右v型槽的斜面作用,使得滚轴4a沿v型槽斜面进行微量位移和偏斜,由于左v型槽和右v型槽相反,故在滚轴4a两端处产生方向相反的两个正压力,以平衡最外层行星滚轮左滚动部4b和右滚动部4c接触区域所受的力和力矩,从而在各层行星滚轮之间,以及行星滚轮和外圈以及太阳轮之间的接触区域产生传动所需的正压力,实现随负载自适应加载;通过简单的机械结构实现了自适应的加载,无需借助外力,利于简化减速器的结构。
33.本实施例中,所述行星滚轮设置有三层分别为内层行星滚轮2、中层行星滚轮3以及外层行星滚轮4,所述内层行星滚轮2为十字滚轮,所述中层行星滚轮3为工字型滚轮,所述内层行星滚轮2的大径外圆与太阳轮外圆形成滚动摩擦副,所述内层行星滚轮2的左右两处小径外圆与中层行星滚轮3的左右两处大径外圆分别形成两处滚动摩擦副,所述中层行星滚轮3的小径外圆与外层行星滚轮4的右滚动部4c外圆形成滚动摩擦副。结合图4所示,内层行星滚轮2具有左、中和右三处摩擦传动副,中层行星滚轮3也具有左、中和右三处摩擦传动副,该传动方式可改善各层行星滚轮的受力均匀性,利于保持各层行星滚轮稳定的传动轨迹以及可靠的配合关系;各级行星滚轮轴线和太阳轮轴线互相平行,实现各接触区域零自旋传动,极大减小轮系的摩擦损失,提高传动效率,且具有巨大的高速传动潜力;
34.本实施例中,所述滚轴4a的两端分别安装有滚轮轴承8,两个所述滚轮轴承8分别安装于左v型槽和右v型槽内。自适应加载机构集成在行星架上以减小减速器的轴向尺寸。此外,轴承8采用滚轮轴承,且设置在低速级外层行星滚轮上,左v型槽和右v型槽直接作用于轴承8的外圈上,以减小对滚轴4a的摩擦,提高减速器扭矩容量和使用寿命。滚轮轴承8根据实际工况沿槽面移动,并产生垂直于v型槽面的接触力;所述自适应加载机构根据滚轮轴承8所受的接触力自动调节左滚动部4b外圆和外环5内圆接触区域内传递切向载荷时所需要的正压力;所述自适应加载机构根据滚轮轴承8所受的接触力自动调节右滚动部4c外圆和相邻层的行星滚轮外圆接触区域内传递切向载荷时所需要的正压力;
35.本实施例中,各层行星滚轮在轴向和径向方向浮动设置。当受到不平衡或突变载荷时,实现各层行星滚轮自动调整空间位置直至重新建立平衡状态,实现平稳运转。
36.本实施例中,所述左部行星架6和右部行星架7通过行星架轴承9安装于外壳10内圆,所述左部行星架为圆盘形结构,所述左v型槽开设于左部行星架外圆,所述左v型槽与相应的行星架轴承内圈之间形成用于安装相应滚轮轴承的左部安装位,所述滚轴4a左端对应的滚轮轴承安装于左部安装位内,该轴承外圈与对应的左v型槽面配合,所述右部行星架为环形结构,所述右v型槽开设于右部行星架的内圆处,所述外壳10右部盖有右端面挡板11,所述右端面挡板11内侧具有轴向凸出形成的外盘11a,所述外盘伸至右部行星架内圆,所述外盘外壁与右v型槽之间形成用于安装相应滚轮轴承的右部安装位,所述滚轴4a右端对应
的滚轮轴承安装于右部安装位内,该轴承外圈与对应的右v型槽面配合。
37.所述外壳10内设有油槽12,外壳上开设有注油口13和放油口14,行星架轴承9采用带密封圈的深沟球轴承,以提高密封性能,使用安全可靠。
38.左部安装位和右部安装位为异形腔室,其内壁与滚轮轴承之间具有间隙,可使滚子轴承沿相应的v型槽面移动实现微小偏移从而进行加载,而且通过左部安装位和右部安装位的设置,实现了外层行星滚轮的轴向和径向的浮动设置,由于内层行星滚轮和中层行星滚轮没有被相对于外圈进行轴向和径向定位,故随着外层行星滚轮的浮动,内层行星滚轮和中层行星滚轮也会相应的浮动,各层行星滚轮以浮动的方式沿太阳轮轴线对称设置,实现均载,以改善各级行星滚轮的受力情况,降低减速器对加工误差和装配精度的要求,实现平稳运转。
39.外圈的两侧设置有外圈挡圈15,两个外圈挡圈15挡在外层行星滚轮的轴向两侧,以限制外层行星滚轮的轴向浮动范围,以保证各层行星滚轮的稳定接触;
40.结合图2所示,左部行星架6和右部行星架7通过连接柱16固连,左部行星架6外侧还配有左端面挡板17,通过左端面挡板和右端面挡板的配合用于对滚轮轴承8的轴向外侧定位,外层行星滚轮4通过滚子轴承8被左部行星架和右部行星架约束,以实现各级行星滚轮正确接触。
41.本实施例中,所述太阳轮与内层行星滚轮之间以及内层行星滚轮与中层行星滚轮之间为线接触方式,所述中层行星滚轮与外层行星滚轮之间以及外层行星滚轮与外圈之间为点接触方式。其中太阳轮、内层行星滚轮以及中层行星滚轮均为圆柱滚轮结构,左滚动部4b以及右滚动部4c通过母线俢形改善接触状态,为鼓型结构;太阳轮与内层行星滚轮之间、内层行星滚轮和中层行星滚轮之间为线接触,并边缘修形减小应力集中,以提高承载能力。中层行星滚轮和外层行星滚轮之间、外层行星滚轮和外圈之间为点接触,以适应当外层行星滚轮自动加载时轴线微量位移,以改善接触情况。
42.本实施例中,所述太阳轮包括相互传动配合的左太阳轮1a和右太阳轮1b,所述左太阳轮1a以轴向浮动且转动配合的方式通过轴承安装于左部行星架上的安装孔内,所述右太阳轮1b以轴向浮动且转动配合的方式通过轴承安装于外盘11a上的安装孔内。所述左太阳轮1a和右太阳轮1b通过螺栓连接紧固,且通过太阳轮轴承18分别设安装于左侧行星架6和右侧行星架7上,绕其自身轴线旋转;左太阳轮1a与左部行星架安装孔之间以及右太阳轮1b与右部行星架安装孔之间设置有密封圈19,并留有适当间隙;
43.本实施例中,所述左滚动部4b的外径小于右滚动部4c的外径,所述外圈一体成型凸出于壳体的内壁。
44.结合图2所示,外层行星滚轮本身形成了一级减速,并结合三层行星滚轮的逐级减速,进一步提高了减速比;
45.该结构的减速器,是一种小型化、高速化、轻量化、集成化的多滚轮式行星牵引减速器方案,具有大速比、大刚度、高效率、零自旋、高承载能力及零侧隙超高精度传动等优点;适用于体积要求小、传动要求平稳、空间结构紧凑、静谧低振追求的精密传动场合,如机器人一体化关节、微小步距进给精密定位装置、室内或特种器械、微重力操作机械以及电动汽车等领域。得益于牵引传动具有高速平稳性能,故可采用高速电机以降低电机尺寸,提高系统功率密度,从而实现电气小型化设计。此外,该减速器不需要复杂的专用加工设备,各
零件形状简单且能自定心故对安装误差不敏感,工艺性好,成本低,且产品一致性高,工程化实现较为简单,易于流水线大批次生产。
46.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1