一种非线性传动结构旋转轴的控制方法和装置与流程
1.本发明属于机床机械控制领域,具体涉及一种非线性传动结构旋转轴的控制方法和装置。
背景技术:
2.按国家机械行业标准对摇臂轴铣床进行整机检验时,检验项目g12(工作台对摇臂轴移动的平行度在300mm测量长度上为0.035mm),g13(转盘回转对工作台面的平行度0.035mm)这两项精度由于受多项几何精度误差和零件加工误差累积的影响,测量值较大,为达到检验项目要求,一般通过刮研床身圆口平面来保证,这种方式存在着劳动强度大和生产效率低的问题,大大增加了工人劳动负担的同时,降低了摇臂轴铣床的生产效率,而且机床的几何精度难以得到控制。
3.对于非1:1传动比的机械结构,现有数控控制系统,参数只能针对线性的传动比进行设置,若是非线性的传动比,如果电机端与轴端的减速比,不是一个线性关系,系统端没法直接将该轴设置为旋转轴,无法通过设置相应的参数,来正确实现轴的运动控制,及显示轴当前坐标位置。
技术实现要素:
4.本发明提供一种非线性传动结构旋转轴的控制方法和装置,用于解决现有技术中,对于非线性传动结构旋转轴中摇臂轴的转动角度控制准确性差的问题。
5.本发明提供了一种非线性传动结构旋转轴的控制装置,包括:与控制系统连接的驱动结构、与驱动结构连接的传动结构和与传动结构连接的摇臂轴;所述传动结构包括丝杆,传动结构在驱动结构的驱动下使得丝杆沿轴向平移,丝杆的自由端通过铰链连接摇臂轴的自由端,所述摇臂轴的基端开有中心孔,中心孔设置有固定的中心轴,中心孔与中心轴之间通过轴承连接。
6.有益效果:本方案中将控制系统的指令转化为驱动结构中丝杆的位移量,随后通过丝杆与摇臂轴之间通过铰链连接的连接方式,进一步从而改变摇臂轴的旋转角度。该装置对非线性传动结构的传动方式进行了量化,相比直接测量摇臂轴的旋转角度而言,其表现更为直观,且更为符合现有的驱动结构的驱动精度,简单容易实现,且保证了对于摇臂轴旋转轴的角度的测量精度,有利于控制系统通过驱动结构和传送结构,控制摇臂轴旋转轴的旋转角度。
7.进一步,所述传动结构还包括电机、第一传动轮、第二传动轮、同步带,所述电机与第一传动轮同轴连接,所述第一传动轮与第二传动轮均与同步带配合,所述第一传动带通过同步带带动第二传动轮旋转,第二传动轮设有内孔,所述内孔内壁设有内螺纹,所述内螺纹与所述丝杆啮合,所述丝杆能够滑动和旋转;所述丝杆远离所述第二传动轮的一端通过铰链连接摇臂轴的自由端。
8.进一步,所述丝杆的自由端固接有定滑轮,所述铰链的两端均连接摇臂轴的自由
端,铰链的中部穿过定滑轮。
9.进一步,所述铰链与摇臂轴连接的两个端点之间的距离大于零。
10.进一步,驱动结构包括驱动器,所述驱动器在控制系统的指令下,控制电机的输出轴旋转对应的角度。
11.本发明还提供一种非线性传动结构旋转轴的控制方法,包括:
12.获取输入的目标摇臂轴转动角度;
13.将所述目标摇臂轴转动角度带入预设公式中得到目标铰链运动距离,进而得到目标铰链坐标位置;根据目标铰链运动距离,计算得到驱动结构中电机的旋转周数,进而得到对应的驱动指令;
14.根据所述驱动指令,驱动结构驱动传动结构中的丝杆移动,进而使得摇臂轴进行对应转动。
15.进一步,所述控制方法还包括:
16.检测铰链的当前坐标位置;
17.在铰链的当前坐标位置达到所述目标铰链坐标位置时,停止驱动结构工作。
18.进一步,所述控制方法还包括:
19.根据所述当前铰链坐标位置,代入预设公式中得到对应的当前摇臂轴转动角度;
20.显示所述当前摇臂轴转动角度。
21.进一步,所述检测铰链的当前坐标位置后,还将当前坐标位置存储到寄存器中。
22.进一步,所述预设公式是根据权利要求1-4中任一所述的非线性传动结构旋转轴的控制装置中驱动结构和传动结构之间的驱动-传动配合设置。
23.进一步,所述预设公式为,a=2arcsin(l/2r)=2arcsin(m/2rn);
24.其中,a为摇臂轴摆动的圆弧角度;l为丝杆走过的直线距离;r为摇臂轴r轴旋转半径;m为丝杆的螺距;n为同步带与电机输出轴之间的传动比。
附图说明
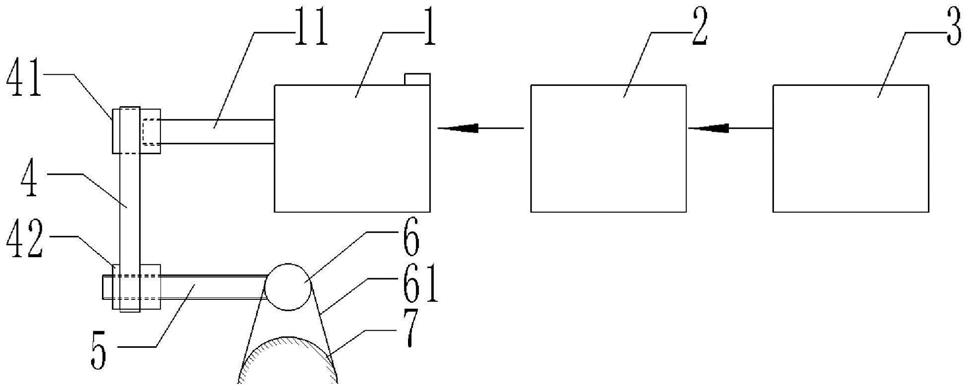
25.图1为本发明一种非线性传动结构旋转轴的控制装置实施例一的原理示意图;
26.图2为本发明一种非线性传动结构旋转轴的控制装置实施例一的模块示意图。
具体实施方式
27.下面通过具体实施方式进一步详细的说明:
28.说明书附图中的附图标记包括:电机1、驱动机构2、控制系统3、同步带4、第一传动轮41、第二传动轮42、丝杆5、圆盘6、铰链61、摇臂轴7、距离传感器31、显示器32、处理器33、信号发送器34、输入模块35、信号接收器21。
29.实施例一:
30.如图1和图2所示,一种非线性传动结构旋转轴的控制装置,包括:控制系统3、与控制系统3连接的驱动结构2、与驱动结构2连接的传动结构和与传动结构连接的摇臂轴7。控制系统3,如图2所示,包括,寄存器31、处理器33、信号发送器34、输入模块35和显示器。驱动结构2包括信号接收器21。传动结构包括电机1、第一传动轮41、第二传动轮42、同步带4、丝杆5、铰链61和摇臂轴7。
31.在一些实施例中,所述电机1采用伺服电机。
32.电机1的输出轴11与第一传动轮41同轴连接,例如,第一传动轮41上同轴开设盲孔,所述盲孔用于安装电机1的输出轴11的自由端,电机1的输出轴11的自由端进入到盲孔后不会在盲孔内打滑,即,电机1启动后,电机1的输出轴11旋转,旋转的输出轴11的左端能够带动第一传动轮41旋转。
33.第一传动轮41和第二传动轮42均为可旋转轮轴,第一传动轮41和第二传动轮42的中心轴不会变动,例如,在机箱的外壳上设置固定的两个中心轴,两个中心轴分别塞入第一传动轮41和第二传动轮42左端的盲孔中,第一传动轮41与中心轴之间设置滚珠轴承,第二传动轮42与中心轴之间同样设置滚珠轴承,中心轴保证第一传动轮41和第二传动轮42的位置相对固定,滚珠轴承保证了第一传动轮41和第二传动轮42均能够正常旋转。
34.同步带4的两端分别与第一传动轮41和第二传动轮42相互配合;使用时,电机1的输出轴带动第一传送轮转动,第一传送轮通过同步带4带动第二传送轮转动。在一个实施例中,同步带4两端开放,第一传送轮位于第二传送轮在同步带4旋转方向的后端。在另一个实施例中,同步带4两端闭合,即,同步带4两端首尾相连,第一传送轮和第二传送轮均与同步带4配合。
35.第一传动轮41与第二传动轮42均与同步带4配合,所述第一传动带通过同步带4带动第二传动轮42旋转,第二传动轮42设有内孔,所述内孔内壁设有内螺纹,所述内螺纹与所述丝杆5啮合,所述丝杆5能够滑动和旋转;所述丝杆5远离所述第二传动轮42的一端通过铰链61连接摇臂轴7的自由端。传动结构在驱动结构的驱动下使得丝杆5沿轴向平移,丝杆5的自由端通过铰链61连接摇臂轴7的自由端,所述摇臂轴7的基端开有中心孔,中心孔设置有固定的中心轴,中心孔与中心轴之间通过轴承连接。
36.在一些实施例中,所述丝杆5的自由端固接有定滑轮,所述铰链61的两端均连接摇臂轴7的自由端,铰链61的中部穿过定滑轮。进一步,铰链61与摇臂轴7连接的两个端点之间的距离大于零。
37.在实施时,本方案中将控制系统3的指令转化为驱动结构中丝杆5的位移量,随后通过丝杆5与摇臂轴7之间通过铰链61连接的连接方式,进一步从而改变摇臂轴7的旋转角度。该装置对非线性传动结构的传动方式进行了量化,相比直接测量摇臂轴7的旋转角度而言,其表现更为直观,且更为符合现有的驱动结构的驱动精度,简单容易实现,且保证了对于摇臂轴7旋转轴的角度的测量精度,有利于控制系统3通过驱动结构和传送结构,控制摇臂轴7旋转轴的旋转角度。
38.下面以,丝杆5端部直接通过铰链61与摇臂轴7的自由端连接为例进行工作过程讲解。
39.(1)根据检测到的丝杆5位置计算并实时显示出当前摇臂轴7的旋转角度
40.距离传感器31,安装于丝杆5上,用于测试自身到第二传动轮42之间的距离x,将该距离x作为铰链61的当前坐标位置,将当前坐标位置发送给控制系统3的处理器33和寄存器。
41.寄存器,采用d地址寄存器,用于存储距离传感器31所发送的当前坐标位置,还用于存储预设公式,预设公式是根据上述非线性传动结构旋转轴的控制装置中驱动结构和传动结构之间的驱动-传动配合设置而来的,a=2arcsin(l/2r)=2arcsin(m/2rn);其中,a为
摇臂轴7摆动的圆弧角度;l为丝杆5走过的直线距离;r为摇臂轴7r轴旋转半径;m为丝杆5的螺距;n为同步带4与电机1输出轴之间的传动比;
42.处理器33,用于根据所述当前铰链61坐标位置x,计算丝杆5走过的直线距离l=x-x0,x0为丝杆5在初始状态下与第二传动轮42之间的距离,随后将l代入预设公式a=2arcsin(l/2r)=2arcsin(m/2rn)中,得到对应的当前摇臂轴7转动角度a,将当前摇臂轴7转动角度a发送给显示器32;
43.显示器32,用于显示处理器33发送的当前摇臂轴7转动角度a。
44.(2)根据用户的目标摇臂轴7转动角度控制电机1旋转
45.一种实施方式是:
46.输入模块35,设置为plc度窗口,用于输入目标摇臂轴7转动角度a’;
47.距离传感器31,安装于丝杆5上,用于测试自身到第二传动轮42之间的距离x,将该距离x作为铰链61的当前坐标位置,将当前坐标位置发送给控制系统3的处理器33;
48.处理器33,用于将目标摇臂轴7转动角度a’代入到预设公式中得到目标铰链61运动距离l’;根据所述当前铰链61坐标位置x,计算丝杆5走过的直线距离l=x-x0,x0为丝杆5在初始状态下与第二传动轮42之间的距离;在铰链61的当前坐标位置达到所述目标铰链61坐标位置时,停止驱动结构工作,即,l’=l时,向信号发送器34发送停止指令;
49.信号发送器34,用于将处理器33发送的停止指令发送给驱动结构的信号接收器21;
50.信号接收器21,用于接收信号发送器34发送的停止指令,使得驱动结构控制电机1停止工作。
51.另一种实施方式是:
52.输入模块35,设置为plc度窗口,用于输入目标摇臂轴7转动角度a’;
53.处理器33,用于将目标摇臂轴7转动角度a’代入到预设公式中得到目标铰链61运动距离l’;根据目标铰链61运动距离l’,计算丝杆5的螺距m=n*l’,n是同步带4与电机1之间的传送比,进一步计算得到驱动结构中电机1的旋转周数,进而向信号发送器34发送带有含旋转周数驱动指令;
54.信号发送器34,用于将处理器33发送的含旋转周数驱动指令,发送给驱动结构的信号接收器21;
55.信号接收器21,用于接收信号发送器34发送的含旋转周数驱动指令,使得驱动结构控制电机1按照所述旋转周数工作。
56.实施例二:
57.本发明还提供一种非线性传动结构旋转轴的控制方法,依赖于实施例一中所述的非线性传送结构旋转轴的控制装置实现。
58.一种非线性传动结构旋转轴的控制方法,包括:获取输入的目标摇臂轴转动角度;将所述目标摇臂轴转动角度带入预设公式中得到目标铰链运动距离,进而得到目标铰链坐标位置;根据目标铰链运动距离,计算得到驱动结构中电机的旋转周数,进而得到对应的驱动指令;根据所述驱动指令,驱动结构驱动传动结构中的丝杆移动,进而使得摇臂轴进行对应转动。其中,所述预设公式是上述的非线性传动结构旋转轴的控制装置中驱动结构和传动结构之间的驱动-传动配合设置。具体的,所述预设公式为,a=2arcsin(l/2r)=2arcsin
(m/2rn),其中,a为摇臂轴摆动的圆弧角度;l为丝杆走过的直线距离;r为摇臂轴r轴旋转半径;m为丝杆的螺距;n为同步带与电机输出轴之间的传动比。
59.在一些示例中,所述方法还包括,检测铰链的当前坐标位置;在铰链的当前坐标位置达到所述目标铰链坐标位置时,停止驱动结构工作。
60.在一些示例中,所述方法还包括:根据所述当前铰链坐标位置,代入预设公式中得到对应的当前摇臂轴转动角度;显示所述当前摇臂轴转动角度。
61.在一些示例中,所述方法还包括:所述检测铰链的当前坐标位置后,还将当前坐标位置存储到寄存器中。
62.以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1