驱动装置的制作方法
1.本发明涉及驱动装置。
背景技术:
2.近年来,一方面智能手机等电子设备的薄型化正在发展,而另一方面对所搭载的齿轮马达要求高输出化。在专利文献1中公开了一种搭载于这样的薄型的电子设备的高输出的齿轮箱装置。
3.专利文献1:日本特开2019-47589号公报
4.在驱动装置使驱动对象物平行移动的情况下,有时将输出部分作为齿条齿轮而将马达的旋转转换为平行运动。从齿轮的强度和成型精度的观点出发,驱动齿条齿轮的小齿轮在小径化上存在界限。因此,期望通过使齿条齿轮和齿条齿轮的支承构造薄型化而使驱动装置的厚度方向尺寸小型化。
技术实现要素:
5.本发明的一个方式的目的之一在于提供一种驱动装置,其能够稳定地支承齿条齿轮并且减小整体的厚度。
6.本发明的一个方式为驱动装置,其具有:齿条齿轮,其沿着驱动方向延伸,在上表面侧设置有齿面;齿轮马达,其具有马达主体、与所述马达主体连接的传递机构以及与所述齿条齿轮啮合的小齿轮,该小齿轮与所述传递机构连接并绕中心轴线旋转;以及框架,其将所述齿条齿轮支承为能够滑动。在所述齿条齿轮的下表面的宽度方向两缘部分别设置有沿着所述驱动方向延伸的凹状的台阶部。所述台阶部具有:第1台阶面,其朝向下侧;以及第2台阶面,其朝向所述齿条齿轮的宽度方向外侧。所述框架具有:一对引导壁,该一对引导壁位于所述齿条齿轮的宽度方向两侧;以及一对齿条引导部,该一对齿条引导部从一对所述引导壁分别向所述宽度方向内侧突出并覆盖所述第1台阶面的一部分。在两个所述第1台阶面中的至少一方具有沿着所述齿条齿轮的驱动方向延伸的槽部,在所述齿条引导部上设置有与所述槽部嵌合的突出部,该突出部从下侧支承所述齿条齿轮而使所述齿条齿轮能够滑动。
7.根据本发明的一个方式,提供了一种驱动装置,其能够稳定地支承齿条齿轮并且减小整体的厚度。
附图说明
8.图1是一个实施方式的驱动装置的立体图。
9.图2是一个实施方式的驱动装置的剖视图。
10.图3是一个实施方式的驱动装置的分解图。
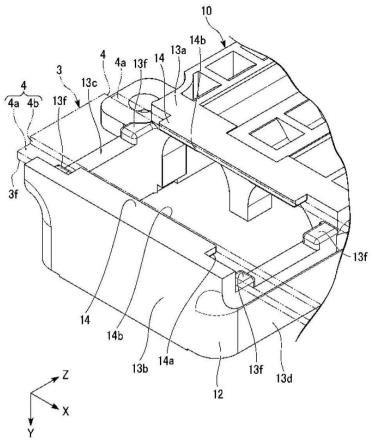
11.图4是从斜下方观察一个实施方式的框架的立体图。
12.图5是一个实施方式的齿条齿轮的立体图。
13.图6是一个实施方式的齿条齿轮和齿条引导部的剖视图。
14.标号说明
15.1:驱动装置;2a、2b:齿轮马达;3:齿条齿轮;3a:上表面;3b:下表面;3k:齿面;4:台阶部;4a:第1台阶面;4b:第2台阶面;5a、5b:小齿轮;10:框架;13a:第1包围壁(引导壁);13b:第2包围壁(引导壁);13c:第3包围壁(连接壁部);13d:第4包围壁(连接壁部);13f:第1引导面;14:齿条引导部;14a:突出部;14b:第2引导面;20a、20b:马达主体;30a、30b:行星齿轮机构(传递机构);j1、j2:中心轴线。
具体实施方式
16.以下,参照附图对本发明的实施方式的驱动装置1进行说明。另外,本发明的范围并不限定于以下的实施方式,能够在本发明的技术思想的范围内任意地变更。
17.在附图中,适当地示出xyz坐标系作为三维正交坐标系。在以下的说明中,只要没有特别说明,将与各中心轴线j1、j2平行的方向(z轴方向)简称为“轴向”,将+z侧简称为“轴向一侧”,将-z侧简称为“轴向另一侧”。另外,将绕各中心轴线j1、j2的周向简称为“周向”,将相对于各中心轴线j1、j2的径向简称为“径向”。
18.并且,为了简化本说明书的说明,将y轴方向简称为上下方向,将+y轴方向简称为上侧,将-y方向简称为下侧。另外,本说明书中的上下方向是为了便于说明而设定的方向,并不限定驱动装置1使用时的姿势。
19.图1是一个实施方式的驱动装置1的立体图。图2是驱动装置1的剖视图。本实施方式的驱动装置1搭载于沿着y轴方向的尺寸得到抑制的薄型的电子设备。
20.如图1所示,驱动装置1具有第1齿轮马达2a、第2齿轮马达2b、齿条齿轮3、框架10以及配件40。
21.第1和第2齿轮马达2a、2b呈沿着z轴方向延伸的圆柱状。第1和第2齿轮马达2a、2b在x轴方向上相邻地配置。
22.如图2所示,第1齿轮马达2a沿着第1中心轴线j1延伸。另外,第2齿轮马达2b沿着第2中心轴线j2延伸。第1中心轴线j1和第2中心轴线j2相互平行地延伸。
23.第1齿轮马达2a具有第1马达主体20a、与第1马达主体20a连接的第1行星齿轮机构(第1传递机构)30a、以及与第1行星齿轮机构30a连接的第1小齿轮5a。第1马达主体20a的马达轴29、第1行星齿轮机构30a以及第1小齿轮5a绕第1中心轴线j1旋转。
24.同样地,第2齿轮马达2b具有第2马达主体20b、与第2马达主体20b连接的第2行星齿轮机构(第2传递机构)30b以及与第2行星齿轮机构30b连接的第2小齿轮5b。第2马达主体20b的马达轴29、第2行星齿轮机构30b以及第2小齿轮5b绕第2中心轴线j2旋转。
25.第1和第2马达主体20a、20b沿着各中心轴线(即第1中心轴线j1或者第2中心轴线j2)延伸。第1和第2马达主体20a、20b的整体呈以各中心轴线j1、j2为中心的圆柱状。在本实施方式中,第1和第2马达主体20a、20b是步进马达。
26.第1和第2马达主体20a、20b具有绕各中心轴线j1、j2旋转的转子21、从径向外侧包围转子21的定子22、以及进一步从径向外侧包围定子22的马达壳体23。转子21具有沿着各中心轴线j1、j2延伸的马达轴29。
27.第1和第2行星齿轮机构30a、30b分别与第1和第2马达主体20a、20b的马达轴29连
接。第1和第2行星齿轮机构30a、30b分别是对从第1和第2马达主体20a、20b输出的动力进行减速并传递至第1和第2小齿轮5a、5b的减速机构。在本实施方式中,第1行星齿轮机构30a的减速比与第2行星齿轮机构30b的减速比彼此相等。
28.第1和第2行星齿轮机构30a、30b分别具有齿轮壳体39、第1太阳齿轮33a、3个第1行星齿轮33b、第1轮架31、3个第2行星齿轮34b、第2轮架32、3个第3行星齿轮35b以及第3轮架36。
29.齿轮壳体39固定于框架10。即,第1和第2行星齿轮机构30a、30b在齿轮壳体39中被框架10支承。齿轮壳体39具有内齿齿轮39a和轴承部39d。
30.内齿齿轮39a呈以各中心轴线j1、j2为中心而沿轴向延伸的筒状。内齿齿轮39a与第1行星齿轮33b、第2行星齿轮34b以及第3行星齿轮35b啮合。轴承部39d位于内齿齿轮39a的轴向另一侧的端部。轴承部39d以中心轴线j1、j2为中心而呈筒状延伸。在轴承部39d的内周面安装有滑动轴承。轴承部39d将后述的圆柱部36f支承为能够旋转。
31.第1太阳齿轮33a固定于马达轴29,与马达轴29一起以各中心轴线j1、j2为中心进行旋转。3个第1行星齿轮33b沿各中心轴线j1、j2的周向等间隔地配置。3个第1行星齿轮33b与第1太阳齿轮33a啮合。3个第1行星齿轮33b随着第1太阳齿轮33a的旋转而绕各中心轴线j1、j2公转旋转。
32.第1轮架31具有第1圆盘部31b、3根第1副轴31a以及第2太阳齿轮31c。第1圆盘部31b以各中心轴线j1、j2为中心而沿径向延伸。3根第1副轴31a从第1圆盘部31b向轴向一侧延伸。第2太阳齿轮31c以各中心轴线j1、j2为中心从第1圆盘部31b向轴向另一侧延伸。
33.3根第1副轴31a分别将第1行星齿轮33b支承为能够旋转。第1轮架31随着3个第1行星齿轮33b的公转旋转而以各中心轴线j1、j2为中心进行旋转。
34.第2太阳齿轮31c由于是第1轮架31的一部分,因此随着第1行星齿轮33b的公转旋转而以各中心轴线j1、j2为中心进行旋转。
35.3个第2行星齿轮34b沿各中心轴线j1、j2的周向等间隔地配置。3个第2行星齿轮34b与第2太阳齿轮31c啮合。3个第2行星齿轮34b随着第2太阳齿轮31c的旋转而沿各中心轴线j1、j2的周向公转旋转。
36.第2轮架32具有第2圆盘部32b、3根第2副轴32a以及第3太阳齿轮32c。第2圆盘部32b以各中心轴线j1、j2为中心而沿径向延伸。3根第2副轴32a从第2圆盘部32b向轴向一侧延伸。第3太阳齿轮32c以各中心轴线j1、j2为中心从第2圆盘部32b向轴向另一侧延伸。
37.3根第2副轴32a分别将第2行星齿轮34b支承为能够旋转。第2轮架32随着3个第2行星齿轮34b的公转旋转而以各中心轴线j1、j2为中心进行旋转。
38.第3太阳齿轮32c由于是第2轮架32的一部分,因此随着第2行星齿轮34b的公转旋转而以各中心轴线j1、j2为中心进行旋转。
39.3个第3行星齿轮35b沿各中心轴线j1、j2的周向等间隔地配置。3个第3行星齿轮35b与第3太阳齿轮32c啮合。3个第3行星齿轮35b随着第3太阳齿轮32c的旋转而沿各中心轴线j1、j2的周向公转旋转。
40.第3轮架36具有第3圆盘部36b、3根第3副轴36a以及输出部36c。第3圆盘部36b以各中心轴线j1、j2为中心而沿径向延伸。3根第3副轴36a从第3圆盘部36b向轴向一侧延伸。输出部36c以各中心轴线j1、j2为中心从第3圆盘部36b向轴向另一侧延伸。
41.3根第3副轴36a分别将第3行星齿轮35b支承为能够旋转。第3副轴36a随着3个第3行星齿轮35b的公转旋转而以各中心轴线j1、j2为中心进行旋转。
42.输出部36c具有以各中心轴线j1、j2为中心而延伸的圆柱部36f和从圆柱部36f的前端面沿轴向延伸的嵌合轴部(凸部)37。圆柱部36f被齿轮壳体39的轴承部39d支承为能够旋转。另外,在输出部36c的朝向轴向另一侧(-z侧)的端面设置有保持孔36d。在保持孔36d中插入有轴36p。
43.第1和第2小齿轮5a、5b以各中心轴线j1、j2为中心进行配置。在第1和第2小齿轮5a、5b上设置有沿轴向贯通的贯通孔5h。在贯通孔5h中插入有轴36p。
44.轴36p以各中心轴线j1、j2为中心而延伸。轴36p的轴向一侧的端部被输出部36c支承,轴向另一侧的端部经由轴承6支承于配件40。轴36p辅助第1和第2小齿轮5a、5b绕各中心轴线j1、j2的旋转。
45.在第1和第2小齿轮5a、5b的朝向轴向一侧(+z侧)的面上设置有嵌合凹部38。在嵌合凹部38中插入有嵌合轴部37。由此,第1马达主体20a经由第1行星齿轮机构30a而使第1小齿轮5a旋转。同样地,第2马达主体20b经由第2行星齿轮机构30b而使第2小齿轮5b旋转。
46.如图1所示,齿条齿轮3呈以上下方向为板厚方向的板状。齿条齿轮3通过mim(metal injection molding,金属粉末注射成型)而成型。第1和第2小齿轮5a、5b在与各中心轴线j1、j2垂直的方向(在本实施方式中为x轴方向)上相邻地配置。齿条齿轮3沿着第1和第2小齿轮5a、5b所排列的方向(x轴方向)呈直线状延伸。
47.齿条齿轮3相对于第1和第2小齿轮5a、5b位于下侧。齿条齿轮3在上表面3a侧设置有齿面3k。第1和第2小齿轮5a、5b在上下方向上与齿条齿轮3对置地啮合。
48.齿条齿轮3与第1小齿轮5a和第2小齿轮5b啮合。齿条齿轮3通过被传递从第1和第2小齿轮5a、5b输出的动力而沿x轴方向移动。
49.在以下的说明中,将齿条齿轮3驱动的方向称为驱动方向。即,齿条齿轮3沿着驱动方向延伸。在本实施方式中,驱动方向与x轴方向一致。另外,有时将z轴方向称为齿条齿轮3的宽度方向。
50.根据本实施方式的驱动装置1,通过第1和第2齿轮马达2a、2b对作为1个驱动对象的齿条齿轮3进行驱动。因此,驱动装置1能够以高输出驱动齿条齿轮3。此外,能够将第1和第2齿轮马达2a、2b的旋转转换为平行运动。
51.根据本实施方式的驱动装置1,第1和第2齿轮马达2a、2b呈沿着x轴方向排列配置的圆柱状。因此,能够抑制驱动装置1的高度方向(y轴方向)的尺寸,从而容易将驱动装置1搭载于在y轴方向上薄型的电子设备。即,根据本实施方式,通过使用第1和第2马达主体20a、20b,能够在确保驱动装置1的输出的同时抑制y轴方向的尺寸。另外,与将定子沿轴向层叠的情况相比,不需要使转子磁铁沿轴向较长,即使在被施加冲击等的情况下,也能够抑制转子磁铁的损伤。
52.齿条齿轮3具有朝向上侧的上表面3a和朝向下侧的下表面3b。设置于上表面3a侧的齿面3k沿着齿条齿轮3的驱动方向排列。在上表面3a设置有配置于齿面3k的宽度方向两侧的对置面3f。对置面3f沿着齿条齿轮3的驱动方向延伸。
53.如上所述,本实施方式的齿条齿轮3是通过mim而成型的成型品。因此,在齿条齿轮3上残留有在成型时产生的顶销的痕迹3t。在本实施方式中,顶销的痕迹3t设置于对置面
3f。痕迹3t在对置面3f处成型为凹状。多个痕迹3t沿着齿条齿轮3的驱动方向等间隔地排列。通过将顶销配置在齿条齿轮3的设置有齿面3k的上侧,能够使齿条齿轮3从模具顺畅地脱离。
54.在下表面3b的宽度方向两缘部分别设置有凹状的台阶部4。台阶部4沿着驱动方向延伸。台阶部4具有朝向下侧的第1台阶面4a和朝向齿条齿轮3的宽度方向外侧的第2台阶面4b。第1台阶面4a位于比齿条齿轮3的下表面3b靠上侧的位置。分别位于齿条齿轮3的宽度方向一侧和另一侧的第1台阶面4a彼此位于同一平面上,在台阶面4a上沿着驱动方向设置有后述的槽部4c。
55.图3是驱动装置1的分解图。
56.框架10支承第1齿轮马达2a和第2齿轮马达2b。在框架10上固定有配件40。框架10将齿条齿轮3支承为能够滑动。
57.框架10具有多个(在本实施方式中为2个)外壳部11、支承框部12以及多个固定部15。框架10通过mim而成型。
58.2个外壳部11分别支承第1和第2齿轮马达2a、2b。外壳部11在上侧开口。外壳部11在开口内收纳并固定第1或第2齿轮马达2a、2b。在本实施方式中,2个外壳部11在x轴方向上排列配置。
59.固定部15呈沿着与上下方向垂直的平面(xz平面)的板状。在固定部15上设置有沿板厚方向贯通的固定孔15a。在固定孔15a中插入有用于将驱动装置1固定于外部部件(例如,收纳有驱动装置1的电子设备的壳体)的螺钉。框架10在固定部15处固定于外部部件。
60.支承框部12相对于2个外壳部11配置在轴向另一侧(-z侧)。支承框部12呈从四方包围第1和第2小齿轮5a、5b的框状。由支承框部12包围的俯视为矩形状的包围空间在上下方向上开口。支承框部12具有以上下方向作为开口方向的上侧开口部和下侧开口部。下侧开口部被齿条齿轮3覆盖。另外,在上侧开口部中插入有配件40。
61.配件40插入至支承框部12的内部并固定于支承框部12。由此,配件40在第1和第2小齿轮5a、5b的周围加强框架10。配件40保持轴承6。配件40经由轴承6将轴36p支承为能够旋转。本实施方式的配件40通过mim而成型。
62.支承框部12具有:第1包围壁(引导壁)13a,其位于第1和第2小齿轮5a、5b的轴向一侧(+z侧);第2包围壁(引导壁)13b,其位于轴向另一侧(-z侧);第3包围壁(连接壁部)13c,其位于齿条齿轮3的驱动方向一侧(-x侧);以及第4包围壁(连接壁部)13d,其位于齿条齿轮3的驱动方向另一侧(+x侧)。即,框架10具有从上下方向观察时呈矩形状配置的第1~第4包围壁13a~13d。
63.第1包围壁13a和第2包围壁13b沿着齿条齿轮3的驱动方向延伸。第1包围壁13a和第2包围壁13b在齿条齿轮3的宽度方向上彼此对置。在第1包围壁13a上设置有在上侧开口的一对缺口16。在一对缺口16中分别插入有第1和第2齿轮马达2a、2b的轴承部39d。
64.图4是从斜下方观察框架10的立体图。
65.第1包围壁13a和第2包围壁13b位于齿条齿轮3的宽度方向两侧。即,齿条齿轮3被第1包围壁13a和第2包围壁13b从宽度方向两侧夹持。
66.第1包围壁13a和第2包围壁13b具有从下端部分别向齿条齿轮3的宽度方向内侧突出的齿条引导部14。即,框架10具有一对齿条引导部14。齿条引导部14沿着齿条齿轮3的驱
动方向延伸。一对齿条引导部14覆盖齿条齿轮3的各自不同的台阶部4的第1台阶面4a的一部分。在齿条引导部14设置有后述的突出部14a。
67.齿条引导部14具有位于突出方向前端的第2引导面14b。第2引导面14b是沿着齿条齿轮3的驱动方向延伸的平坦面。一对齿条引导部14的第2引导面14b彼此在齿条齿轮3的宽度方向上相互对置。
68.一对齿条引导部14位于支承框部12的下侧开口部。一对齿条引导部14分别向彼此相对的方向突出。另外,一对齿条引导部14分别以均匀的截面沿着齿条齿轮3所延伸的方向(x轴方向)平行地延伸。
69.图5是齿条齿轮3的立体图,图6是齿条齿轮3和齿条引导部14的剖视图。
70.如图6所示,齿条引导部14相对于齿条齿轮3位于下侧。齿条引导部14具有突出部14a。突出部14a向上侧突出。突出部14a呈截面为圆弧状的柱状,沿着齿条齿轮3的驱动方向延伸。
71.在齿条齿轮3沿着驱动方向设置有向下侧开口的截面为v字状的槽部4c。突出部14a与槽部4c嵌合。
72.突出部14a在上下方向上与齿条齿轮3的第1台阶面4a的槽部4c对置地接触。齿条引导部14在突出部14a处从下侧支承齿条齿轮3而使该齿条齿轮3能够滑动。由此,支承框部12对齿条齿轮3的沿着x轴方向的移动进行引导。
73.通过从第1和第2小齿轮5a、5b向齿条齿轮3的动力传递,齿条齿轮3从第1和第2小齿轮5a、5b受到下侧的力。根据本实施方式,齿条引导部14在突出部14a处支承齿条齿轮3的第1台阶面4a的槽部4c。槽部4c的截面为v字状,与该槽部4c嵌合的突出部14a的截面为圆弧状,因此两者的接触部分变少,由此,能够限制齿条齿轮3与齿条引导部14的滑动部的面积,从而降低摩擦阻力。并且,通过突出部14a与槽部4c嵌合而成为齿条齿轮3移动时的引导件,齿条齿轮3在移动时不会发生蛇行等而能够直线地移动。
74.在本实施方式中,突出部14a中的一部分位于第1中心轴线j1的正下方。同样地,突出部14a中的一部分位于第2中心轴线j2的正下方。突出部14a受到从第1和第2小齿轮5a、5b向齿条齿轮3传递的下侧的力。通过突出部14a配置在第1和第2中心轴线j1、j2的正下方,能够抑制齿条齿轮3的挠曲,从而能够提高齿条齿轮3的滑动效率。
75.另外,在本说明书中,突出部14a位于中心轴线j1、j2的“正下方”是指突出部14a位于中心轴线j1、j2的下侧并且从上下方向观察时与中心轴线j1、j2重叠。
76.如图4所示,根据本实施方式,框架10具有覆盖齿条齿轮3的第1台阶面4a的齿条引导部14,在该齿条引导部14的突出部14a处将齿条齿轮3支承为能够滑动。因此,抑制了齿条引导部14相对于齿条齿轮3向下侧大幅突出。即,根据本实施方式,能够在齿条齿轮3的厚度尺寸(上下方向的尺寸)的范围内利用框架10支承齿条齿轮3。其结果为,能够稳定地支承齿条齿轮3并且实现驱动装置1的厚度(上下方向的尺寸)的小型化。
77.齿条引导部14的第2引导面14b在齿条齿轮3的宽度方向上与齿条齿轮3的第2台阶面4b对置地引导第2台阶面4b。齿条引导部14限制齿条齿轮3在宽度方向上的移动。由此,齿条引导部14能够使齿条齿轮3有效地平行移动。
78.如图4所示,第3包围壁13c和第4包围壁13d沿着齿条齿轮3的宽度方向延伸。第3包围壁13c和第4包围壁13d在齿条齿轮3的驱动方向上相互对置。即,第3包围壁13c和第4包围
壁13d在驱动方向上排列。第3包围壁13c和第4包围壁13d将第1包围壁13a与第2包围壁13b彼此连接。由此,第1~第4包围壁13a~13d的刚性彼此提高。
79.第3包围壁13c和第4包围壁13d位于齿条齿轮3的上侧。在第3包围壁13c和第4包围壁13d的下表面分别设置有从上侧引导齿条齿轮3的一对第1引导面13f。一对第1引导面13f彼此在齿条齿轮3的宽度方向上排列。第1引导面13f是平坦面。
80.如图4所示,第1引导面13f位于齿条齿轮3的对置面3f的正上方。第3包围壁13c和第4包围壁13d从上侧引导齿条齿轮3的动作。另外,在齿条齿轮3被从第1和第2小齿轮5a、5b传递动力而从第1和第2小齿轮5a、5b受到向下的力时,在第1引导面13f与对置面3f之间产生少许间隙。另外,在齿条齿轮3从驱动对象受到力的情况下等,第1引导面13f与对置面3f相互滑动。
81.齿条齿轮3的对置面3f在上下方向上与框架10的第1引导面13f对置。如上所述,齿条齿轮3从第1和第2小齿轮5a、5b受到向下的力,因此在齿条齿轮3驱动时,第1引导面13f与对置面3f的接触被限制。因此,即使在对置面3f上设置有痕迹3t,痕迹3t也不容易使齿条齿轮3的滑动效率恶化。根据本实施方式,通过将顶销的痕迹3t设置于对置面3f,能够顺畅地进行齿条齿轮3的成型,而且能够抑制齿条齿轮3的动作的驱动效率降低。
82.根据本实施方式,框架10从下侧由突出部14a支承齿条齿轮3,从上侧由第1引导面13f进行引导。因此,能够抑制齿条齿轮3从框架10脱离。特别是在本实施方式中,突出部14a和第1引导面13f设置于1个部件(框架10)。因此,能够提高突出部14a与第1引导面13f的相对的尺寸精度,从而提高齿条齿轮3的滑动效率。
83.在本实施方式中,在第3包围壁13c与第4包围壁13d之间配置有第1小齿轮5a和第2小齿轮5b。因此,第3包围壁13c的第1引导面13f和第4包围壁13d的第1引导面13f在齿条齿轮3的驱动方向上充分分离。其结果为,第3包围壁13c的第1引导面13f和第4包围壁13d的第1引导面13f能够使齿条齿轮3向驱动方向的驱动稳定。
84.如图4所示,从上下方向观察时,突出部14a和第1引导面13f配置在互不相同的位置。在框架10中,突出部14a面向上侧,第1引导面13f面向下侧。因此,在利用模具对框架10进行成型并以上下方向作为拔模方向的情况下,能够在不使用滑动件和型芯等的情况下成型突出部14a和第1引导面13f。
85.另外,这里,“面向上侧”是指不被框架10的其他部位遮挡而向上侧露出。同样地,“面向下侧”是指不被框架10的其他部位遮挡而向下侧露出。
86.以上,对本发明的实施方式进行了说明,但实施方式中的各结构及它们的组合等只是一例,在不脱离本发明的主旨的范围内,能够进行结构的附加、省略、置换以及其他变更。另外,本发明并不受实施方式限定。
87.例如,突出部14a形成为截面为圆弧状的圆形形状,但也可以是球形状。另外,截面为圆弧状的圆形系可以是在齿条齿轮3的移动方向上延伸的形状,也可以在齿条齿轮3的移动方向上设置有多个突出部14a,也可以不是圆形形状。槽部4c的截面也可以不为v字状,例如也可以是截面为矩形状。
88.例如,在本实施方式中,对驱动装置1具有多个齿轮马达2a、2b的情况进行了说明。但是,驱动装置1也可以采用仅具有1个齿轮马达的结构。即使在该情况下,在齿条齿轮和框架具有与上述实施方式相同的以下各结构的情况下,也能够得到稳定地支承齿条齿轮并且
减小整体的厚度这样的效果。即,在齿条齿轮的下表面的宽度方向两缘部分别设置有沿驱动方向延伸的凹状的台阶部。台阶部具有朝向下侧的第1台阶面和朝向齿条齿轮的宽度方向外侧的第2台阶面。框架具有位于齿条齿轮的宽度方向两侧的一对引导壁和从一对引导壁分别向宽度方向内侧突出并覆盖第1台阶面的一部分的一对齿条引导部。在齿条引导部上设置有突出部,该突出部从下侧支承齿条齿轮而使该齿条齿轮能够滑动。
89.另外,在本实施方式中,马达主体20a、20b是步进马达。然而,作为马达主体,也可以采用其他结构的马达。同样地,在本实施方式中,对采用行星齿轮机构30a、30b作为将马达主体20a、20b的动力传递至小齿轮5a、5b的传递机构的情况进行了说明。通过具有该结构,能够抑制驱动装置1的高度方向(y轴方向)的尺寸,从而容易将驱动装置1搭载于在y轴方向上薄型的电子设备。但是,作为传递机构,也可以采用其他结构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1