基于图像自动采集与识别的柑橘木虱监测装置及系统
1.本发明涉及害虫监控技术领域,特别涉及基于图像自动采集与识别的柑橘木虱监测装置及系统。
背景技术:
2.柑橘木虱diaphorina citri(kuwayama)是柑橘类新梢期主要害虫,也是柑橘黄龙病的传播媒介。成虫多在寄主嫩梢产卵,孵化出若虫后吸取嫩梢汁液,直至成虫羽化。受害的寄主嫩梢可出现凋萎、新梢畸变等。木虱还会分泌的白色蜜露并粘附于枝叶上,能引起煤烟病的发生。为确保柑橘果园健康生产,对已发生黄龙病的果园通过防治柑橘木虱进行严格的病媒控制仍然是最好的长期措施之一。
3.随着物联网技术普及应用,害虫监测数据采集从传统人工采样调查向机器智能化发展。柑橘木虱的种群数量决定了柑橘黄龙病的传播速度和危害程度,目前国内外学者主要利用有色粘虫板、杀虫灯对木虱进行诱集和人工计数监测,有关利用机器进行智能监测的研究刚刚起步。
4.在如下文献中,还可以发现更多与上述技术方案相关的信息:
5.在专利公开号为cn 114303689a的中国发明专利中,公开了一种树木蛀干害虫防治设备,该防治设备包括机架、行走装置、除草装置、打孔注射插瓶一体化装置、虫孔探测装置、涂刷装置以及升降装置;升降装置有两组,定义两组升降装置分别为第一升降装置和第二升降装置;行走装置安装于机架上且用于带动机架行走;除草装置、第一升降装置以及第二升降装置分别设置于机架上;打孔注射插瓶一体化装置安装于第一升降装置上;虫孔探测装置和涂刷装置均安装于第二升降装置上。
6.在专利公开号为cn 210432686u的中国实用新型专利中,公开了一种基于图像识别的害虫自动计数系统,所述计数系统包括电诱杀单元、拍摄单元、害虫清理单元、集虫网兜和识别控制终端;电诱杀单元包括高压电网和诱芯;拍摄单元包括拍摄仓、拍摄面板和摄像头,拍摄仓位于高压电网下方,拍摄面板铰接设置于拍摄仓内,摄像头的镜头朝向拍摄面板的中心设置;害虫清理单元包括转动电机和抽风机,转动电机的输出轴与拍摄面板固定,抽风机位于拍摄面板的下方;集虫网兜设置于拍摄仓的下方;识别控制终端分别与摄像头、转动电机和抽风机连接。
7.在实现本发明的过程中,发明人发现现有技术中存在如下问题:
8.现有技术中,弧形轨道的半径不可调节,导致拍摄机构只能沿固定的轨道对柑橘木虱进行不同角度的拍摄,但是随着柑橘木虱的生长,柑橘的尺寸变大,需要更换不同尺寸的弧形轨道对其进行继续拍摄,费时费力。
技术实现要素:
9.鉴于上述问题,本技术提供了基于图像自动采集与识别的柑橘木虱监测装置及系统,用于解决弧形轨道的半径不可调节,需要更换不同尺寸的弧形轨道对其进行继续拍摄,
费时费力的技术问题。
10.为实现上述目的,第一方面,发明人提供了一种基于图像自动采集与识别的柑橘木虱监测装置,包括:
11.立杆,所述立杆用于安装在地面上;
12.上下伸缩机构,所述上下伸缩机构设置在所述立杆上;
13.轨道固定架,所述轨道固定架设置在所述上下伸缩机构上,所述上下伸缩机构用于驱动所述轨道固定架上下移动;
14.弧形轨道,所述弧形轨道固定在所述轨道固定架上;以及
15.拍摄机构,所述拍摄机构滑动设置在所述弧形轨道上,所述拍摄机构包括用于拍摄柑橘木虱的摄像头以及驱动所述摄像头沿所述弧形轨道延伸方向相对滑动的第一驱动单元;
16.其中,所述弧形轨道的半径可调节,以适应不同大小的柑橘植物。
17.区别于现有技术,上述技术方案通过弧形轨道固定在所述轨道固定架上;拍摄机构滑动设置在所述弧形轨道上,所述拍摄机构包括用于拍摄柑橘木虱的摄像头以及驱动所述摄像头沿所述弧形轨道延伸方向相对滑动的第一驱动单元;所述弧形轨道的半径可调节,以适应不同大小的柑橘植物。如此,可以改变摄像头的不同角度,对柑橘木虱进行监控,当遇到不同尺寸大小的柑橘植物时,可以调节弧形轨道的半径,以适应不同大小的柑橘植物,无需设计有多种尺寸的弧形轨道,无需对弧形轨道进行经常更换,只要调节弧形轨道的半径即可,省时省力,节省成本。
18.作为本发明的一种实施方式,所述弧形轨道为柔性材料制成。
19.如此,通过弧形轨道为柔性材料制成,具体的为弹性金属制成,具有一定的柔韧性,同时,可以支撑拍摄机构在其上进行滑动,方便对弧形轨道的半径进行调节。
20.作为本发明的一种实施方式,所述柑橘木虱监测装置还包括调节机构,所述调节机构设置在所述上下伸缩机构上,所述调节机构用于调整所述弧形轨道的半径。
21.如此,调节机构具体可以为牵引装置,调节机构分别与弧形轨道的两端相连接,弧形轨道其本身具有弹性,向内弯曲,需要调节其半径时,调节机构将弧形轨道的两端向外拉,就可以调节弧形轨道的半径,方便控制弧形轨道的半径。
22.作为本发明的一种实施方式,所述柑橘木虱监测装置还包括控制器,所述摄像头还用于拍摄柑橘植物的大小,所述摄像头与所述控制器相连接,并将柑橘植物的数据传输给所述控制器,所述控制器连接并控制所述调节机构,所述控制器根据摄像头发送的柑橘植物的数据控制所述调节机构调整所述弧形轨道的半径。
23.如此,可以通过摄像头发送的柑橘植物的数据控制所述调节机构调整所述弧形轨道的半径,实现自动化控制弧形轨道的半径,无需人工控制,更符合野外的监测使用。同时,弧形轨道可以通过摄像头监控,假设只有部分柑橘生长超过拍摄范围,只要控制其中对应一端的弧形轨道向外拉伸,将柑橘重新归入摄像头监控范围即可。
24.作为本发明的一种实施方式,所述拍摄机构还包括用于驱动所述摄像头靠近或远离柑橘木虱的第二驱动单元。
25.如此,可以通过第二驱动单元靠近或者远离柑橘木虱,起到类似机械对焦聚焦的功能,方便摄像头对柑橘木虱进行监测。
26.作为本发明的一种实施方式,所述拍摄机构还包括滚轮以及滑动架,所述第一驱动单元用于驱动所述滚轮沿所述弧形轨道的相对滑动,所述滑动架与所述滚轮固定连接,所述第一驱动单元、所述第二驱动单元以及所述摄像头设置在所述滑动架上,所述摄像头设置在所述第二驱动单元的输出端上。
27.如此,可以通过第一驱动单元驱动所述滚轮沿所述弧形轨道的相对滑动,从而带动滑动架的移动,最终带动摄像头移动,方便摄像头绕柑橘木虱进行观察拍摄。
28.作为本发明的一种实施方式,所述拍摄机构包括两个以上的所述滚轮以及滚轮夹紧组件,其中一个所述滚轮设置在所述弧形轨道的上方,另一个所述滚轮设置在所述弧形轨道的下方,所述滚轮夹紧组件用于驱动上下两个所述滚轮相互靠近,以夹紧所述弧形轨道,所述第一驱动单元用于驱动所述滚轮沿所述弧形轨道延伸方向相对滑动。
29.如此,通过滚轮夹紧组件驱动两个所述滚轮相互靠近,以夹紧所述弧形轨道,可以提高滑动架设置在弧形轨道上的稳定性,第一驱动单元可以驱动一个滚轮转动,就可以带动滑动架的运动。
30.作为本发明的一种实施方式,所述弧形轨道的上方设置有两个排列设置的所述滚轮,所述弧形轨道的下方设置有一个所述滚轮,所述滚轮为弹性轮,所述滚轮上均设置有与所述弧形轨道相互配合的凹槽,所述滚轮夹紧组件用于驱动上方的两个所述滚轮向下移动以及用于驱动下方的所述滚轮向上移动,以夹紧所述弧形轨道。
31.如此,上方的两个滚轮与下方的一个滚轮,形成三角形结构,可以进一步提高滑动架在弧形轨道上的稳定性。
32.作为本发明的一种实施方式,所述弧形轨道的两端均设置有限位挡板,所述限位挡板上设置有位置传感器,所述位置传感器连接并控制所述第一驱动单元。
33.如此,可以通过限位挡板与位置传感器的配合,对拍摄机构进行限位,控制拍摄机构的极限位置。
34.为实现上述目的,第二方面,发明人提供了一种基于图像自动采集与识别的柑橘木虱监测系统,包括:如上述发明人提供的任一项所述的基于图像自动采集与识别的柑橘木虱监测装置。
35.区别于现有技术,本技术的技术方案的系统,可以改变摄像头的不同角度,对柑橘木虱进行监控,当遇到不同尺寸大小的柑橘植物时,可以调节弧形轨道的半径,以适应不同大小的柑橘植物,无需设计有多种尺寸的弧形轨道,无需对弧形轨道进行经常更换,只要调节弧形轨道的半径即可,省时省力,节省成本。
36.上述发明内容相关记载仅是本技术技术方案的概述,为了让本领域普通技术人员能够更清楚地了解本技术的技术方案,进而可以依据说明书的文字及附图记载的内容予以实施,并且为了让本技术的上述目的及其它目的、特征和优点能够更易于理解,以下结合本技术的具体实施方式及附图进行说明。
附图说明
37.附图仅用于示出本技术具体实施方式以及其他相关内容的原理、实现方式、应用、特点以及效果等,并不能认为是对本技术的限制。
38.在说明书附图中:
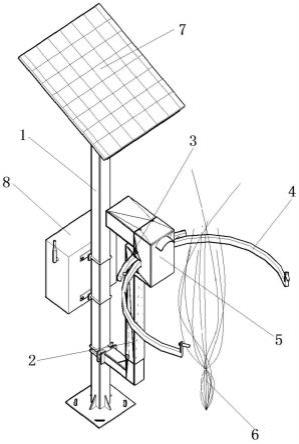
39.图1为本技术一个实施例的基于图像自动采集与识别的柑橘木虱监测装置的结构示意图;
40.图2为本技术一个实施例的上下伸缩机构的结构示意图;
41.图3为本技术一个实施例的弧形轨道与拍摄机构的结构示意图;
42.图4为本技术一个实施例的弧形轨道与拍摄机构的使用状态图一;
43.图5为本技术一个实施例的弧形轨道与拍摄机构的使用状态图二;
44.图6为本技术一个实施例的拍摄机构的爆炸结构图;
45.图7为本技术一个实施例的拍摄机构的内部结构图。
46.上述各附图中涉及的附图标记说明如下:
47.1、立杆,
48.2、上下伸缩机构,
49.3、轨道固定架,
50.4、弧形轨道,
51.41、限位挡板,
52.42、位置传感器,
53.5、拍摄机构,
54.51、摄像头,
55.52、第一驱动单元,
56.53、第二驱动单元,
57.54、滚轮,
58.55、滑动架,
59.56、前盖,
60.57、后盖,
61.6、柑橘植物,
62.7、太阳能板,
63.8、控制箱。
具体实施方式
64.为详细说明本技术可能的应用场景,技术原理,可实施的具体方案,能实现目的与效果等,以下结合所列举的具体实施例并配合附图详予说明。本文所记载的实施例仅用于更加清楚地说明本技术的技术方案,因此只作为示例,而不能以此来限制本技术的保护范围。
65.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中各个位置出现的“实施例”一词并不一定指代相同的实施例,亦不特别限定其与其它实施例之间的独立性或关联性。原则上,在本技术中,只要不存在技术矛盾或冲突,各实施例中所提到的各项技术特征均可以以任意方式进行组合,以形成相应的可实施的技术方案。
66.除非另有定义,本文所使用的技术术语的含义与本技术所属技术领域的技术人员通常理解的含义相同;本文中对相关术语的使用只是为了描述具体的实施例,而不是旨在
限制本技术。
67.在本技术的描述中,用语“和/或”是一种用于描述对象之间逻辑关系的表述,表示可以存在三种关系,例如a和/或b,表示:存在a,存在b,以及同时存在a和b这三种情况。另外,本文中字符“/”一般表示前后关联对象是一种“或”的逻辑关系。
68.在本技术中,诸如“第一”和“第二”之类的用语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何实际的数量、主次或顺序等关系。
69.在没有更多限制的情况下,在本技术中,语句中所使用的“包括”、“包含”、“具有”或者其他类似的开放式表述,意在涵盖非排他性的包含,这些表述并不排除在包括所述要素的过程、方法或者产品中还可以存在另外的要素,从而使得包括一系列要素的过程、方法或者产品中不仅可以包括那些限定的要素,而且还可以包括没有明确列出的其他要素,或者还包括为这种过程、方法或者产品所固有的要素。
70.与《审查指南》中的理解相同,在本技术中,“大于”、“小于”、“超过”等表述理解为不包括本数;“以上”、“以下”、“以内”等表述理解为包括本数。此外,在本技术实施例的描述中“多个”的含义是两个以上(包括两个),与之类似的与“多”相关的表述亦做此类理解,例如“多组”、“多次”等,除非另有明确具体的限定。
71.在本技术实施例的描述中,所使用的与空间相关的表述,诸如“中心”“纵向”“横向”“长度”“宽度”“厚度”“上”“下”“前”“后”“左”“右”“竖直”“水平”“垂直”“顶”“底”“内”“外”“顺时针”“逆时针”“轴向”“径向”“周向”等,所指示的方位或位置关系是基于具体实施例或附图所示的方位或位置关系,仅是为了便于描述本技术的具体实施例或便于读者理解,而不是指示或暗示所指的装置或部件必须具有特定的位置、特定的方位、或以特定的方位构造或操作,因此不能理解为对本技术实施例的限制。
72.除非另有明确的规定或限定,在本技术实施例的描述中,所使用的“安装”“相连”“连接”“固定”“设置”等用语应做广义理解。例如,所述“连接”可以是固定连接,也可以是可拆卸连接,或成一体设置;其可以是机械连接,也可以是电连接,也可以是通信连接;其可以是直接相连,也可以通过中间媒介间接相连;其可以是两个元件内部的连通或两个元件的相互作用关系。对于本技术所属技术领域的技术人员而言,可以根据具体情况理解上述用语在本技术实施例中的具体含义。
73.现有技术中,弧形轨道的半径不可调节,导致拍摄机构只能沿固定的轨道对柑橘木虱进行不同角度的拍摄,但是随着柑橘木虱的生长,柑橘的尺寸变大,需要更换不同尺寸的弧形轨道对其进行继续拍摄,费时费力。
74.申请人研究发现,可以调节弧形轨道的半径,以适应不同大小的柑橘植物,无需设计有多种尺寸的弧形轨道,无需对弧形轨道进行经常更换,只要调节弧形轨道的半径即可,省时省力,节省成本。
75.本实施例中,基于图像自动采集与识别的柑橘木虱监测装置及系统,可以应用在柑橘木虱监控的各个技术领域。
76.根据本技术的一些实施例,请参阅图1至图7,本实施例涉及一种基于图像自动采集与识别的柑橘木虱监测装置,包括立杆1、上下伸缩机构2、轨道固定架3、弧形轨道4以及拍摄机构5,立杆1用于安装在地面上;上下伸缩机构2设置在立杆1上;轨道固定架3设置在
上下伸缩机构2上,上下伸缩机构2用于驱动轨道固定架3上下移动;弧形轨道4固定在轨道固定架3上;拍摄机构5滑动设置在弧形轨道4上,拍摄机构5包括用于拍摄柑橘木虱的摄像头51以及驱动摄像头51沿弧形轨道4延伸方向相对滑动的第一驱动单元52;其中,弧形轨道4的半径可调节,以适应不同大小的柑橘植物6。
77.本实施例中,基于图像自动采集与识别的柑橘木虱监测装置还包括植保智盒、太阳能板7、蓄电池装置、4g网络天线、集成控制箱8等,植保智盒、控制器、蓄电池装置等放置在控制箱8内。太阳能板7为蓄电池装置供电,监测装置通过4g网络天线与外部进行通讯,集成控制箱8连接并控制其他所有结构。
78.上下伸缩杆可进行上下伸缩调整高度,适应不同高度的柑橘叶片拍摄;
79.弧形轨道可使拍摄小车在轨道上多角度对叶片进行拍摄。同时摄像头可做伸缩运动,来调整镜头的拍摄距离。
80.弧形轨道半径可在200mm到500mm之间进行调节,针对树上某一枝叶片进行拍摄。
81.拍摄机构5运行到轨道两端位置,两端位置有限位挡板41和位置传感器42。拍摄机构5还包括前盖56与后盖57,前盖56与后盖57起到防雨防尘作用。
82.如此,本实施例通过弧形轨道4固定在轨道固定架3上;拍摄机构5滑动设置在弧形轨道4上,拍摄机构5包括用于拍摄柑橘木虱的摄像头51以及驱动摄像头51沿弧形轨道4延伸方向相对滑动的第一驱动单元52;弧形轨道4的半径可调节,以适应不同大小的柑橘植物6。如此,可以改变摄像头51的不同角度,对柑橘木虱进行监控,当遇到不同尺寸大小的柑橘植物6时,可以调节弧形轨道4的半径,以适应不同大小的柑橘植物6,无需设计有多种尺寸的弧形轨道4,无需对弧形轨道4进行经常更换,只要调节弧形轨道4的半径即可,省时省力,节省成本。
83.根据本技术的一些实施例,可选的,弧形轨道4为柔性材料制成。
84.如此,通过弧形轨道4为柔性材料制成,具体的为弹性金属制成,具有一定的柔韧性,同时,可以支撑拍摄机构5在其上进行滑动,方便对弧形轨道4的半径进行调节。
85.根据本技术的一些实施例,可选的,柑橘木虱监测装置还包括调节机构,调节机构设置在上下伸缩机构2上,调节机构用于调整弧形轨道4的半径。
86.如此,调节机构具体可以为牵引装置,调节机构分别与弧形轨道4的两端相连接,弧形轨道4其本身具有弹性,向内弯曲,需要调节其半径时,调节机构将弧形轨道4的两端向外拉,就可以调节弧形轨道4的半径,方便控制弧形轨道4的半径。
87.根据本技术的一些实施例,可选的,柑橘木虱监测装置还包括控制器,摄像头51还用于拍摄柑橘植物6的大小,摄像头51与控制器相连接,并将柑橘植物6的数据传输给控制器,控制器连接并控制调节机构,控制器根据摄像头51发送的柑橘植物6的数据控制调节机构调整弧形轨道4的半径。
88.本实施例中,控制器为常规的控制器,具体原理不在此累述。
89.如此,可以通过摄像头51发送的柑橘植物6的数据控制调节机构调整弧形轨道4的半径,实现自动化控制弧形轨道4的半径,无需人工控制,更符合野外的监测使用。同时,弧形轨道4可以通过摄像头51监控,假设只有部分柑橘生长超过拍摄范围,只要控制其中对应一端的弧形轨道4向外拉伸,将柑橘重新归入摄像头51监控范围即可。
90.根据本技术的一些实施例,可选的,拍摄机构5还包括用于驱动摄像头51靠近或远
离柑橘木虱的第二驱动单元53。
91.如此,可以通过第二驱动单元53靠近或者远离柑橘木虱,起到类似机械对焦聚焦的功能,方便摄像头51对柑橘木虱进行监测。
92.根据本技术的一些实施例,可选的,拍摄机构5还包括滚轮54以及滑动架55,第一驱动单元52用于驱动滚轮54沿弧形轨道4的相对滑动,滑动架55与滚轮54固定连接,第一驱动单元52、第二驱动单元53以及摄像头51设置在滑动架55上,摄像头51设置在第二驱动单元53的输出端上。
93.滚轮54采用内嵌橡胶的弹性轮,使小车运行更加平稳。
94.如此,可以通过第一驱动单元52驱动滚轮54沿弧形轨道4的相对滑动,从而带动滑动架55的移动,最终带动摄像头51移动,方便摄像头51绕柑橘木虱进行观察拍摄。
95.根据本技术的一些实施例,可选的,拍摄机构5包括两个以上的滚轮54以及滚轮54夹紧组件,其中一个滚轮54设置在弧形轨道4的上方,另一个滚轮54设置在弧形轨道4的下方,滚轮54夹紧组件用于驱动上下两个滚轮54相互靠近,以夹紧弧形轨道4,第一驱动单元52用于驱动滚轮54沿弧形轨道4延伸方向相对滑动。
96.如此,通过滚轮54夹紧组件驱动两个滚轮54相互靠近,以夹紧弧形轨道4,可以提高滑动架55设置在弧形轨道4上的稳定性,第一驱动单元52可以驱动一个滚轮54转动,就可以带动滑动架55的运动。
97.根据本技术的一些实施例,可选的,弧形轨道4的上方设置有两个排列设置的滚轮54,弧形轨道4的下方设置有一个滚轮54,滚轮54为弹性轮,滚轮54上均设置有与弧形轨道4相互配合的凹槽,滚轮54夹紧组件用于驱动上方的两个滚轮54向下移动以及用于驱动下方的滚轮54向上移动,以夹紧弧形轨道4。
98.如此,上方的两个滚轮54与下方的一个滚轮54,形成三角形结构,可以进一步提高滑动架55在弧形轨道4上的稳定性。
99.根据本技术的一些实施例,可选的,弧形轨道4的两端均设置有限位挡板41,限位挡板41上设置有位置传感器42,位置传感器42连接并控制第一驱动单元52。
100.用于安装位置传感器42的竖板为限位挡板41。
101.如此,可以通过限位挡板41与位置传感器42的配合,对拍摄机构5进行限位,控制拍摄机构5的极限位置。
102.第二方面,本实施例还涉及一种基于图像自动采集与识别的柑橘木虱监测系统,包括如上述提供的任一项的基于图像自动采集与识别的柑橘木虱监测装置。
103.柑橘木虱监测系统具体工作流程如下:
104.1、本系统以植保智盒为中心,植保智盒通过控制上下伸缩机构2和拍摄机构5小车的运动,来扑捉特定角度叶片画面,再控制摄像头的第二驱动单元53实现画面对焦,进行叶片拍摄。
105.2、可实现一天中多次及多角度拍摄。
106.边缘计算盒子(植保智盒在一种基于图像识别的害虫自动计数系统中的“识别控制终端9”已有阐述)在本系统内的功能不同。本系统中植保智盒通过控制上下伸缩杆和小车的运动,来扑捉特定角度叶片画面,再控制摄像头推杆实现画面对焦,进行叶片拍摄。可实现一天中多次及多角度拍摄。
107.拍摄到的照片处理:(1)利用植保智盒内置的靶标害虫(柑橘木虱)的识别检测模型对图像进行ai识别监测作物的状态(是否拍照到叶片,及叶片大小是否属于拍照条件要求),控制摄像头推杆实现画面对焦及拍摄角度。(2)将拍摄到柑橘木虱图像,通过4g网络发送到云平台,方便配套软件调用相关图像,以及利用图像进行ai识别计数模型训练。
108.区别于现有技术,本技术的技术方案的系统,可以改变摄像头51的不同角度,对柑橘木虱进行监控,当遇到不同尺寸大小的柑橘植物6时,可以调节弧形轨道4的半径,以适应不同大小的柑橘植物6,无需设计有多种尺寸的弧形轨道4,无需对弧形轨道4进行经常更换,只要调节弧形轨道4的半径即可,省时省力,节省成本。
109.在本实施例中,传感器是通过敏感元件及转换元件把特定的被测信号,按一定规律转换成某种可用信号并输出,以满足信息的传输、处理、记录、显示和控制等要求,传感器能够感受诸如力、温度、光、声、化学成分等物理量,并能把按照一定的规律转换成电压、电流等电学量,或转换为电路的通断。传感器一般由敏感元件及转换元件组成,是实现自动检测和白动控制的首要环节。传感器的作用是把非电学量转换为电学量或电路的通断,从而实现很方便地进行测量、传输、处理和控制。
110.在本实施例中,控制器用于接收传感器传输的信号,并根据传感器传输的信号控制执行机构或执行单元,控制器是指按照预定顺序改变主电路或控制电路的接线和改变电路中电阻值来控制电动机的启动、调速、制动和反向的主令装置。由程序计数器、指令寄存器、指令译码器、时序产生器和操作控制器组成,它是发布命令的“决策机构”,即完成协调和指挥整个计算机系统的操作。
111.在本实施例中,执行机构或执行单元,包括但不限于压缩机构、旋转机构、摆动机构、振动机构、升降机构、切割机构等等。
112.需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本发明的专利保护范围。因此,基于本发明的创新理念,对本文所述实施例进行的变更和修改,或利用本发明说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本发明的专利保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1