1.本发明涉及齿轮传动领域,尤其涉及一种弹性永磁传动咬合触头。
背景技术:2.在申请号为2021104647311的专利申请中,公开了球伞弧锥自动变速器。联合轮与球伞机构配合时,随着球伞机构旋转速度的增加,位于球伞机构外端的咬合头受到的离心力增大,旋转半径增加,进而让咬合头与联合轮上位于不同旋转半径位置的齿体啮合,从而实现变速。球伞弧锥无级自动变速器具有的显著优点包括:免去了传动皮带、复杂的变速控制系统,可实现无级变速。在同等性能要求下,球伞弧锥无级自动变速器具有体量更小、能损更低、运行顺畅、速比度大、维护简单等特点。
3.但球伞弧锥无级自动变速器在实验过程发现咬合传动存在一定的问题:
4.1)当采用齿合传动时,存在无序磕齿现象,高速区震动激烈,难以实用化。
5.2)当采用摩擦传动时,触头磨损很快,同样难以实用化。
技术实现要素:6.本发明的目的是提供一种弹性永磁传动咬合触头,不仅能让联合轮与球伞机构的永磁咬合头咬合距离更长,咬合传动过程轻柔顺畅,磨损率极低。
7.为实现上述目的,本发明提供一种弹性永磁传动咬合触头,包括齿合臂,所述齿合臂的自由端连接有传动咬合触头总成;传动咬合触头总成包括永磁咬合头和连接组件,永磁咬合头通过连接组件与齿合臂的自由端滑动连接;永磁咬合头与齿合臂之间设有第一弹性件。
8.作为本发明的进一步改进,所述永磁咬合头与齿合臂两者滑动配合且滑动方向与永磁咬合头旋转时的圆弧径向相重合,所述第一弹性件的压缩和回弹方向与永磁咬合头旋转时的圆弧径向相平行。
9.作为本发明的更进一步改进,还包括滑动套接的杆体和套筒;杆体和套筒两者其中一个设置在永磁咬合头上,另一个设置在齿合臂上,所述第一弹性件位于杆体顶端与套筒内腔底部之间;杆体与套筒通过所述连接组件滑动连接。
10.作为本发明的更进一步改进,所述第一弹性件为控压橡胶垫。
11.作为本发明的更进一步改进,所述杆体和套筒两者与所述连接组件之间设有第二弹性件。
12.作为本发明的更进一步改进,所述连接组件包括同时穿过杆体和套筒的连接销杆;所述第二弹性件为套设在连接销杆外的橡胶套筒;橡胶套筒同时穿过杆体和套筒。
13.作为本发明的更进一步改进,所述连接销杆包括相连接的杆身和杆帽;所述橡胶套筒套设在杆身外;所述连接组件还包括垫板和卡环,垫板和卡环均套设在杆身另一端;杆帽和垫板将套筒夹在中间;卡环与杆身卡接并对垫板进行限位。
14.作为本发明的更进一步改进,所述杆身与垫板两者相套接的部位其截面轮廓为非
圆形状;垫板上设有卡环插孔,卡环上设有插头,插头与卡环插孔插接配合。
15.有益效果
16.与现有技术相比,本发明的弹性永磁传动咬合触头的优点为:
17.1、永磁咬合头既有磁性,与齿合臂之间又设有控压橡胶垫。通过预设控压橡胶垫的弹性余量,在永磁咬合头旋转至与联合轮接触时,可大幅提升摩擦咬合距离,咬合力更大。通过调整控压橡胶垫的弹性强度来控制正合点的压力,加上磁吸力、离心力将获得非常理想的咬合力。
18.2、“永磁咬合头”间隔三层橡胶,可沿“齿合臂”弹性滑动,加上磁吸力的稳定作用,防止永磁咬合头与联合轮刚开始接触时出现明显弹跳,使咬合传动过程极其轻柔顺畅,磨损率极低。其咬合过程类似于轮胎(相当于“永磁咬合头”)与地面(相当于“联动轮”)的咬合过程。
19.3、第一弹性件采用控压橡胶垫,体积小弹力强,而且寿命长。
20.4、连接组件中,通过卡环对垫板进行限位,连接销杆的杆身与垫板两者相套接的部位其截面轮廓为非圆形状,防止垫板旋转;卡环与杆身卡接,卡环的插头与垫板上的卡环插孔插接配合,即使长时间使用也不容易脱落,连接稳定性好。
21.弹性永磁传动咬合触头的发明解决了球伞弧锥无级自动变速器的核心难题,使球伞弧锥无级自动变速器实用化成为现实。
22.通过以下的描述并结合附图,本发明将变得更加清晰,这些附图用于解释本发明的实施例。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
24.图1为弹性永磁传动咬合触头使用在联合轮与球伞机构联动结构的示意图;
25.图2为图1中的f处放大图;
26.图3为弹性永磁传动咬合触头的侧视图;
27.图4为图3的e-e处放大图;
28.图5为永磁咬合头的俯视图;
29.图6为连接销杆的俯视图;
30.图7为连接销杆的后视图;
31.图8为垫板的侧视图;
32.图9为卡环的示意图。
具体实施方式
33.现在参考附图描述本发明的实施例。
34.实施例
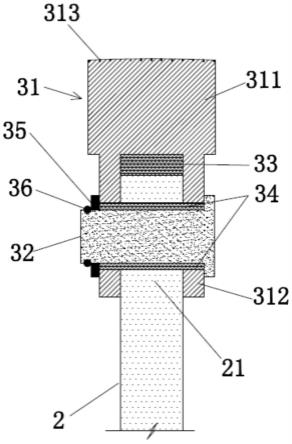
35.本发明的具体实施方式如图1至图9所示,一种弹性永磁传动咬合触头,包括齿合
臂2,齿合臂2的自由端连接有传动咬合触头总成3。传动咬合触头总成3包括永磁咬合头31和连接组件,永磁咬合头31通过连接组件与齿合臂2的自由端滑动连接。永磁咬合头31与齿合臂2之间设有第一弹性件。本实施例中,第一弹性件为控压橡胶垫33,通过设定其厚度来控制静止状态传动咬合触头总成的凸出量,通过选定其弹性强度来控制正压点的压力。
36.永磁咬合头31与齿合臂2两者滑动配合且滑动方向与永磁咬合头31旋转时的圆弧径向相重合,第一弹性件的压缩和回弹方向与永磁咬合头31旋转时的圆弧径向相平行。
37.弹性永磁传动咬合触头还包括滑动套接的杆体21和套筒312。杆体21和套筒312两者其中一个设置在永磁咬合头31上,另一个设置在齿合臂2上,第一弹性件位于杆体21顶端与套筒312内腔底部之间。杆体21与套筒312通过连接组件滑动连接。本实施例中,杆体21设置在齿合臂2的自由端,永磁咬合头31包括相连接的永磁咬合头主体311和套筒312。永磁咬合头主体311顶面表层粗糙处理且设有咬合面凹槽313,咬合面凹槽313可增加咬合面的贴合面积,增大咬合力,表层粗糙处理可增加摩擦系数,增大咬合力。
38.杆体21和套筒312两者与连接组件之间设有第二弹性件。连接组件包括同时穿过杆体21和套筒312的连接销杆32。第二弹性件为套设在连接销杆32外的橡胶套筒34。橡胶套筒34同时穿过杆体21和套筒312。控压橡胶垫33四周与套筒312侧壁相适配,基本不留有缝隙。
39.连接销杆32包括相连接的杆身321和杆帽322。橡胶套筒34套设在杆身321外。连接组件还包括垫板35和卡环36,垫板35和卡环36均套设在杆身321另一端。杆帽322和垫板35将套筒312夹在中间。卡环36与杆身321上的半圆弧槽323卡接并对垫板35进行限位。永磁咬合头31与齿合臂2通过三重橡胶隔断,可以实现限位弹性伸缩。
40.杆身321与垫板35两者相套接的部位其截面轮廓为非圆形状。垫板35上设有卡环插孔352,卡环36上设有插头361,插头361与卡环插孔352插接配合。本实施例中,杆身321上远离杆帽322的一端设有缺口324,设有缺口324的杆身321部分其截面轮廓呈扇形。垫板35上的销孔351也呈扇形。
41.如图1所示,弹性永磁传动咬合触头为球伞机构的一部分,联合轮4与球伞机构1相配合。金属材质的联合轮4与永磁咬合头31两者靠近时产生磁吸力。
42.如图2所示有4条弧线,分别为联合轮4的边缘为联动轮弧线5,弹性永磁咬合触头高速转动时外弧线6,弹性永磁咬合触头静止时外弧线7,弹性永磁咬合触头与联动轮正压时外弧线8。
43.a)正压点o的压力由三层橡胶的反弹力+永磁咬合头离心力+磁吸力构成。
44.b)咬合距离大幅增加:弧ad+弧cd,而普通不能弹性伸缩咬合的咬合距离仅有弧cd。
45.c)永磁咬合头31与齿合臂2相对微幅滑动,最大滑动距离为h。通过三重橡胶隔断,实现高速弹性震动,其震动过程类似于轮胎高速行驶的过程。
46.d)咬合过程压力实现柔和渐变:永磁咬合头31的d点触及a点时,压力为零;永磁咬合头d点由a点咬合运动到o点时(切入段),压力由零增至最大;永磁咬合头d点到c点依次压过o点时(正压段),压力始终保持最大;永磁咬合头c点由o点咬合运动到b点时(脱离段),压力则由最大降至零。
47.以上结合最佳实施例对本发明进行了描述,但本发明并不局限于以上揭示的实施
例,而应当涵盖各种根据本发明的本质进行的修改、等效组合。