一种考虑温度影响的电磁阀电流校准控制方法与流程
1.本发明涉及电磁阀的精确电流控制领域,尤其涉及一种考虑温度影响的电磁阀电流校准控制方法。
背景技术:
2.在液力机械自动变速器液压系统研发和电磁阀产品研发的过程中,为了使得电磁阀或者变速器液压系统获得更加准确的电流-压力性能,排除外部环境对电磁阀电流控制结果的影响,提高电磁阀电流控制的精度,从而实现对电磁阀油压的精确控制;对电磁阀的控制方式一般都采用基于采样电阻的低端恒流控制方式实现电流的闭环控制,但是由于控制器的温度会随着工作时间的变化、工作功率的变化、外部环境温度的变化而发生变化,进而会对低端恒流控制的精度产生影响,最终也会影响电磁阀或者变速器液压控制系统性能的准确性。因此,需要在考虑到控制系统的温度的变化的基础上,对电磁阀的控制电流进行校准,以保证对电磁阀进行精确控制。
技术实现要素:
3.要解决的技术问题:本发明专利提供了一种考虑温度影响的电磁阀电流校准控制方法,可以有效的解决电磁阀的电流控制装置受温度影响产生电流控制误差的影响。
4.采用的技术方案如下:一种考虑温度影响的电磁阀电流校准控制方法,具体方法如下:在电流校准过程中,令目标控制电流为i
cmd
,通过微控制器中设置的电流检测设备采集的实际电流为i
equ
,则所述目标控制电流和电流检测设备采集的实际电流的实际偏差为i
erro1=icmd-i
equ
,通过电磁阀的霍尔电流传感器采集的电流为i
hall
,则所述目标控制电流和霍尔电流传感器采集的电流的采集偏差为i
erro2=icmd-i
hall
;将微控制器处于不同环境温度下,计算不同温度下实际偏差和采集偏差,在实际控制过程中,基于实际偏差和采集偏差对目标控制电流进行校准,最终得到所述微控制器实际输出的电流控制指令。
5.进一步,上述考虑温度影响的电磁阀电流校准控制方法具体还包括以下步骤:步骤s1:在电流校准过程中,将300-800ma之间的目标控制电流,以100ma为一个阶梯,各阶梯目标控制电流i
cmd
(n)对应的实际偏差为i
erro1
(n),实际偏差i
erro1
(n)的平均值为i
erro1
_ave,以及各阶梯目标控制电流i
cmd
(n)对应的采集偏差为i
erro2
(n),采集偏差i
erro2
(n)的平均值为i
erro2
_ave,其中,n表示第n个电流阶梯,n=1,2...6,n=1时对应的目标控制电流为300ma,以此类推;步骤s2:将微控制器置于30℃-140℃的环境温度,以10℃为一个阶梯,记录各阶梯环境温度t(n)下的实际偏差平均值i
erro1
_ave(n)和采集偏差平均值i
erro2
_ave(n),分别得到实际偏差和采集偏差与环境温度之间的一维查表函数f1(i
erro1
_ave(n), t(n))和f2(i
erro2
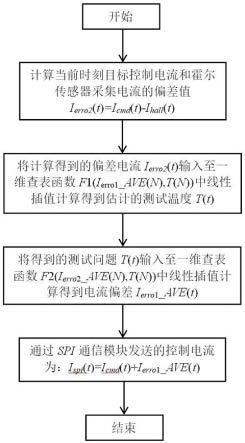
_ave(n), t(n)),其中,n表示第n个温度阶梯,n=1,2...12,t(1)=30℃,以此类推;步骤s3:在实际控制过程中,首先,计算当前时刻t的采集偏差i
erro2
(t),将计算得
到的i
erro2
(t)输入至采集偏差与环境温度的一维查表函数f2(i
erro2
_ave(n), t(n))中,通过线性插值计算得到当前时刻t对应的环境温度t(t);然后,将环境温度t(t)输入至实际偏差与环境温度的一维查表函数f1(i
erro1
_ave(n), t(n))中,通过线性插值计算得到由于环境温度变化产生的实际偏差i
erro1
_ave(t);最后,得到当前时刻t对所述电磁阀的电流控制指令为:i
spi
(t)=i
cmd
(t)+ i
erro1
_ave(t),其中,i
cmd
(t)为当前时刻t的目标控制电流。
6.一种电磁阀电流校准控制系统,包括:电磁阀、微控制器、驱动芯片、采样电阻、电流检测设备、霍尔电流传感器;其中,所述微控制器用于接收霍尔电流传感器和电流检测设备采集的数据,以及与驱动芯片内部的控制逻辑电路进行通信;所示驱动芯片内部的控制逻辑电路用于基于所示微控制器的电流控制指令对所述电磁阀进行控制,所述电流检测设备和所示霍尔电流传感器用于采集所述采样电阻中的电流。
7.进一步,所述微控制器包括用于通信的spi通信模块和用于数据转换的adc模块,所述微控制器通过spi通信模块向所述驱动芯片内部的控制逻辑电路发送电流控制指令。
8.进一步,所述驱动芯片内部控制逻辑电路包括pi控制模块、pwm模块以及放大电路。
9.进一步,所述电流检测设备仅在校准过程中串联入电磁阀电流校准控制系统中,在实际控制过程中霍尔电流传感器串联在电磁阀电流校准控制系统中。
10.本发明的有益效果在于:(1)本发明考虑控制系统受温度变化的影响,计算产生的电流偏差与温度变化的关系,并基于此对电磁阀的目标控制电流进行校准,进而实现对电磁阀的精确控制,整体提供了电磁阀系统性能。
11.(2)本发明结构简单,仅需要在校准过程中的控制系统中串联一个电流检测设备,对控制电流进行校准后,实际使用当中不需要在进行其他改动,便于实施,成本低。
附图说明
12.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
13.图1为本发明电磁阀电流校准控制系统组成图;图2为本发明电磁阀电流校准控制方法流程图;图3为本发明电磁阀电流校准控制方法中各电流误差值关系图。
14.附图标记说明如下:1-电磁阀、2-微控制器、3-驱动芯片的内部控制逻辑电路、4-采样电阻、5-电流检测设备、6-霍尔电流传感器、7-spi通信模块、8-场效应管、9-pi控制模块、10-pwm模块、11-放大模块、12-adc模块。
具体实施方式
15.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是
本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
16.电磁阀电流校准控制系统的组成架构如图1所示,包括:电磁阀、微控制器、驱动芯片、采样电阻、电流检测设备、霍尔电流传感器;其中,所述微控制器用于接收霍尔电流传感器和电流检测设备采集的数据,以及与驱动芯片内部的控制逻辑电路进行通信;所示驱动芯片内部的控制逻辑电路用于基于所示微控制器的电流控制指令对所述电磁阀进行相应控制,所示电流检测设备和所示霍尔电流传感器用于采集采样电阻中的电流,所述微控制器基于下述方法,对所示电磁阀电流进行控制。
17.在一般的控制过程中,微控制器通过spi通信模块将目标控制电流i
cmd
传递给驱动芯片,进而控制电磁阀驱动电路中的控制电流,即i
spi=icmd
。霍尔电流传感器采集的信号输入到微控制器的adc模块进而得到霍尔电流传感器采集的电流值i
hall
,由于霍尔电流传感器有一定的精度误差,其测量值并不能作为电路中的真实实际电流值。电流检测设备测量精度较高,其采集的电流值即等于真实的实际电流值i
equ
,目标控制电流和电流检测设备采集的实际电流的实际偏差为i
erro1=icmd-i
equ
,目标控制电流和霍尔电流传感器采集的电流的采集偏差为i
erro2=icmd-i
hall
。
18.在校准过程中将电流检测设备串联入电磁阀控制电路中,进而为各电流误差值提供依据和基准,在实际控制过程中电流检测设备并不串联在电路中,只有霍尔电流传感器串联在电路中。
19.步骤s1:在电流校准过程中,将300-800ma之间的目标控制电流,以100ma为一个阶梯进行划分,得到各阶梯控制电流i
cmd
(n)对应的实际偏差i
erro1
(n),计算可得到实际偏差i
erro1
(n)的平均值为i
erro1
_ave,以及得到各阶梯目标控制电流i
cmd
(n)对应的采集偏差i
erro2
(n),计算可得到采集偏差i
erro2
(n)的平均值为i
erro2
_ave,其中,n表示第n个电流阶梯,n=1,2...6,n=1时对应的目标控制电流为300ma,以此类推;步骤s2:在电流校准过程中,将微控制器置于30℃-140℃的环境温度,以10℃为一个阶梯,记录各阶梯环境温度t(n)下的实际偏差平均值i
erro1
_ave(n)和采集偏差平均值i
erro2
_ave(n),分别得到实际偏差和采集偏差与环境温度之间的一维查表函数f1(i
erro1
_ave(n), t(n))和f2(i
erro2
_ave(n), t(n)),其中,n表示第n个温度阶梯,n=1,2...12,t(1)=30℃,以此类推;步骤s3:实际的控制过程中,首先,计算当前时刻t的采集偏差i
erro2
(t)=i
cmd
(t)-i
hall
(t),将计算得到的i
erro2
(t)输入至采集偏差与环境温度的一维查表函数f2(i
erro2
_ave(n), t(n))中进行线性插值计算,得到当前时刻t对应的温度t(t),该线性插值计算方法如下:1)获取所述当前时刻采集偏差i
erro2
(t)在所述采集偏差一维查表函数f2(i
erro2
_ave(n), t(n))中的最小区间[i
erro2
_ave(j),i
erro2
_ave(j+1)](j∈n),以及与之对应的环境温度区间[t(j),t(j+1)](j∈n);2) 当前时刻温度t(t),可根据下式计算:t(t)=然后,将上述计算得到温度t(t)输入至实际偏差的一维查表函数f1(i
erro1
_ave
(n), t(n))中进行线性插值计算,得到由于环境温度变化产生的实际偏差i
erro1
_ave(t),该线性插值计算方法如下:1)获取所述当前时刻采集偏差t(t)在所述实际偏差一维查表函数f1(i
erro1
_ave(n), t(n))中的最小区间[i
erro1
_ave(i),i
erro1
_ave(i+1)](i∈n),以及与之对应的环境温度区间[t(i),t(i+1)](i∈n);2)当前时刻的实际偏差i
erro1
_ave(t)可根据下式计算:i
erro1
_ave(t)=最后,微控制器通过spi通信模块向驱动芯片内部的控制逻辑电路发送的当前时刻t对所述电磁阀的电流控制指令为:i
spi
(t)=i
cmd
(t)+i
erro1
_ave(t),其中,i
cmd
(t)为当前时刻t的目标控制电流值。
[0020]
上述电磁阀电流校准控制方法的流程以及各误差电流值之间的关系分别如图2和图3所示。
[0021]
显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1