一种减震器总成的制作方法
1.本发明涉及减震设备技术领域,尤其涉及一种减震器总成。
背景技术:
2.在现实中,在各类交通工具、机械、设备以及生活、生产和工程施工等领域,减震器总成被广泛应用。这类减震器总成的应用特点:1、减震器总成的一端抵接或连接承载点(承载点可以是下方的支撑点,也可以是上方的悬吊点,或者是侧方的固定点),2、震动激励源自承载点。3、减震器总成的另一端则抵接或连接希望被减震的目标物体,目标物体在激励方向上是自由的,依靠承载点提供的支撑(或承载)力量和自身惯性共同维持稳定。减震器总成可以看做一个机械滤波器。人们应用减震器总成,希望尽量多的过滤和消减来自承载点的震动激励对被减震的目标物体惯性状态的改变,尽量保持目标物体的惯性运动状态稳定。以交通工具中的汽车和火车为例,车身是希望被减震的目标物体,支撑点是车轮与地面的接触点,激励震动源自汽车或火车行驶过程中地面的凹凸不平造成的支撑点与车身的距离变化。
3.以汽车的减震器总成为例,主要是由一个支撑弹性机构(如弹簧、气囊、钢板等构件)和一个减震机构构成,弹簧支撑负载(汽车的重量),并通过变形改变支撑力量,将地面凹凸变化对车辆的双向激励力量转化为势能或者释放出势能。在静止状态下,弹簧被压缩或伸长到其弹力与负载相等后,将停在这个平衡点位置,本文中称之为“静载荷平衡点”。在汽车行驶过程中,因路面不平形成的激励造成弹簧变形,弹簧会通过形变将动能转化为势能,下一个瞬间又将势能释放为动能,如此往复弹跳,这时减震机构限制弹簧的自由弹跳,并通过摩擦或其他方式将弹簧弹跳的动能转化为热能或其他能量消耗掉,使汽车尽快恢复稳定。
4.如果弹性元件是自由的,在受到向上激励的瞬间,弹性元件通过压缩形变将动能转化为势能存储在弹性元件内,在下一个瞬间又通过伸张形变将势能释放为动能,此时,动能被传递到车身,车身高度从静载荷平衡点被抬升,此时弹性元件因伸长造成支撑力下降从而不足以支撑车身重量,下一个瞬间车身因重力下降,因惯性又降至低于静载荷平衡点的位置,此时弹性元件又将动能转化为势能,并在下一个瞬间又将势能释放为动能,将车身抬升至高于静载荷平衡点的位置,如此反复,车身将会不停弹跳,使汽车无法保持或尽快恢复稳定,所以必须配合减震机构。减震机构的结构有很多中,如摩擦式、电磁式等,但是液压式最常见,液压式由充填有液压油的缸筒和配套的活塞构成,活塞和缸筒上设有阀门,可以调节流量的大小。减震机构的作用是牵制弹性元件的自由弹跳,并通过油液摩擦将弹跳的动能转化为热能消耗掉,使汽车在通过凹凸地形后尽快恢复稳定,现在的汽车理论认为,在通过一个路面凹凸后,减震机构将车身的起伏控制在大约3次是比较理想的。
5.现有的双向减震器通常由一个支撑弹性元件和一个减震机构并联构成,这个弹性元件和这个减震机构全程参与自静载荷平衡点起正向和反向两个方向的全部伸张和压缩行程。在本文中,称之为“全程双向减震器”。现有的汽车减震器,为了兼顾减震和快速恢复
稳定,通常其减震机构在两个方向上阻尼不同,压缩行程的阻尼较小,伸张行程阻尼较大。
6.在经过路面凸起时,弹性元件与减震机构同时被压缩,因减震机构的阻尼作用,弹性元件无法自由压缩,不能无迟滞反应,仍会有部分冲击传递到车身,车身会有小于路面凸起的抬升,在车轮经过顶点后,因汽车行驶方向、速度与减震机构下行伸张的动作合成的车轮下降曲线与路面凸起的下降曲线有三种匹配情形:1、两个曲线恰好重合,车身完美水平前行,现实中这种情况几乎很少出现;2、车轮下降曲线陡于凸起的下降曲线,此时车身会被继续抬升;3、车轮下降曲线缓于凸起的下降曲线,此时车轮会有悬空现象,车身会有短暂滞空,然后随车轮砸下,车身的冲击大幅度压缩减震弹簧,引起更剧烈的颠簸。在经过路面坑凹时,与上述第三种情形相似,车身悬空后砸下,减震弹簧大幅度压缩,车身大幅度降低,幅度甚至超过坑凹本来的深度,如果此时车轮到达坑沿,此时车轮又将撞击坑沿,弹簧被二次压缩,之后车轮冲出凹坑,车身在几次剧烈颠簸后恢复水平状态。
7.为了兼顾通过和弹跳,解决激励瞬间的快速反应和抑制激励过后的弹跳之间的矛盾,人们设计了各种减震方法,主要分被动式和主动式两大类。被动式减震器主要通过设计活塞缸筒以及各种阀门以求尽量适应各种情形,一般设计中,减震器的压缩行程与伸张行程阻尼不同,压缩行程时阻尼小,伸张行程时阻尼大,除非激励波形与减震器阻尼比完全匹配,否则车身的起伏不可避免,动力损耗较高,尤其是伸张行程阻尼大伸张慢,车轮在经过凹点时或者凸点后的下落过程中往往脱离地面,造成动力损失、操控性能和安全性能降低。为了解决汽车平顺性问题,人们在活塞及缸体的阀门设计上想了各种办法,但是只能寻找到妥协点,而无法达到或接近完美点。总之,现有的减震器总成设计中,通过激励点时的快速反应和抑制弹性元件释放势能的后续弹跳是一对不可调和的矛盾。目前的减震器总成无法很好的解决激励瞬间的快速减震反应和抑制激励过后的弹跳之间的矛盾,只能削足适履寻找一个最佳妥协点。主动式减震器总成则通过主动于预阻尼变化和弹性元件的弹力来兼顾通过和弹跳,解决激励瞬间的快速反应和抑制激励过后的弹跳之间的矛盾,如电磁减震、空气减震、磁悬浮减震等,但都结构复杂,成本高昂,主动控制动作的能量消耗也很高。还有的提出双弹簧减震器总成,主副弹簧力量不同,副弹簧弹力小于负载,静载荷状态下处于最大压缩状态,副弹簧支撑力明显不能满足实际需求,还是属于单弹簧的思维模式,没有实用价值。现有的减震器总成的设计,都没有深入思考弹簧、减震器、负载、路面之间的相互配合与制约关系,还停留在单弹簧的思维模式中。
8.综上来看,在车轮经过激励点时,是减振阶段,因为减震器的阻尼作用,激励动能无法被弹性元件完全吸收转换为势能,总有部分激励动能传递到车身,因车身上下起伏造成能量损耗和车辆平顺性的降低。激励过后是共振阶段,减震器阻滞了减震器总成中弹性元件和车轮的回位动作,尤其是减震器的伸张行程时阻尼较大,迟滞了车轮的伸张回位动作,使车轮出现悬空现象,造成动力损失及操控性和安全性的下降。主动式减震器结构复杂,成本高昂,减震器的每次伸缩行程几乎都有主动的控制动作,能量消耗较大,并且主动控制动作不能完全匹配路况变化。
9.当然,以上仅是以汽车为例,在其他各类交通工具、机械、设备以及生活、生产和工程施工等领域,也存在类似问题。
技术实现要素:
10.(一)要解决的技术问题
11.鉴于现有技术的上述缺点和不足,本发明提供一种减震器总成,其解决了减震器总成受到激励时的减振阶段反应迟滞以及激励过后的共振阶段弹跳抑制差的技术问题。
12.(二)技术方案
13.为了达到上述目的,本发明的减震器总成至少包括第一减震装置和第二减震装置;
14.所述第一减震装置包括至少一个第一弹性机构和至少一个第一减震机构,所述第一弹性机构与所述第一减震机构并联设置,所述第二减震装置包括至少一个第二弹性机构和至少一个第二减震机构,所述第二弹性机构与所述第二减震机构并联设置;
15.所述减震器总成被压缩的行程中,所述第一减震机构的阻尼系数小于所述第二减震机构的阻尼系数;所述减震器总成伸张的行程中,所述第二减震机构的阻尼系数小于所述第一减震机构的阻尼系数。
16.可选地,所述第一减震机构自身压缩行程的阻尼系数小于所述第一减震机构自身伸张行程的阻尼系数;
17.所述第二减震机构自身压缩行程的阻尼系数大于所述第二减震机构自身伸张行程的阻尼系数。
18.可选地,所述第一减震装置还包括第一限位机构,所述第二减震装置还包括第二限位机构;
19.在静止状态下,所述减震器总成的支撑力与被减震物体的重力相等后,所述第一减震机构和所述第二减震机构均保持静止状态;
20.所述第一限位机构设置于所述第一减震机构上,所述第一限位机构用于限制所述第一减震机构只能在静止状态与被压缩状态之间切换;
21.所述第二限位机构设置于所述第二减震机构上,所述第二限位机构用于限制所述第二减震机构只能在静止状态与被拉伸状态之间切换。
22.可选地,限位机构可设置于弹性机构上或减震器总成外部。
23.可选地,所述减震器总成还包括第一主动控制装置,所述第一减震机构和所述第二减震机构均与所述第一主动控制装置连接,所述第一主动控制装置能够控制所述第一减震机构和所述第二减震机构的阻尼系数。
24.可选地,所述减震器总成还包括第二主动控制装置,所述第一弹性机构和所述第二弹性机构均与所述第二主动控制装置连接,所述第二主动控制装置能够控制所述第一弹性机构和所述第二弹性机构的弹力。
25.可选地,所述第一减震机构与所述第二减震机构串联设置。
26.可选地,所述第一减震机构与所述第二减震机构并联设置;
27.所述减震器总成还包括连接装置;所述第一减震机构和所述第二减震机构均与所述连接装置连接。
28.(三)有益效果
29.本发明通过两个减震装置串联或并联的结构,将激励动能完全吸收转换为势能或其他能量,有效地防止了激励动能传递到被减震目标物体而产生震动。将第一减震机构的
收缩阻尼和第二减震机构的伸张阻尼设置成很小甚至在理想状态下可以设置为零,而将第一减震机构的伸张阻尼和第二减震机构的收缩阻尼设置成较大,解决了被减震目标物体在经过激励点后弹跳抑制差的问题,从而解决了减震器总成在激励瞬间的快速反应和抑制激励过后的弹跳之间的矛盾,兼顾了平顺、操控、安全和节能。
附图说明
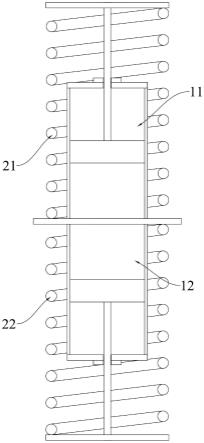
30.图1为本发明的减震器总成的实施例1在静止状态下的结构示意图;
31.图2为本发明的减震器总成的实施例1的第一状态下的结构示意图;
32.图3为本发明的减震器总成的实施例1的第二状态下的结构示意图;
33.图4为本发明的减震器总成的实施例1的第三状态下的结构示意图;
34.图5为本发明的减震器总成的实施例2在静止状态下的的结构示意图;
35.图6为本发明的减震器总成的实施例3在静止状态下的的结构示意图;
36.图7为本发明的减震器总成的实施例4在静止状态下的的结构示意图;
37.图8为本发明的减震器总成的实施例5在静止状态下的的结构示意图;
38.图9为本发明的减震器总成的实施例5的另一种实施方式在静止状态下的结构示意图;
39.图10为本发明的减震器总成的第一限位机构和第二限位机构的安装意图。
40.【附图标记说明】
41.11:第一减震机构;12:第二减震机构;13:第三减震机构;
42.21:第一弹性机构;22:第二弹性机构;
43.31:第一浮动活塞;32:第二浮动活塞。
具体实施方式
44.为了更好地解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。其中,本文所提及的“上”、“下”......等方位名词以图1的定向为参照。
45.虽然附图中显示了本发明的示例性实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更清楚、透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。以交通工具中的汽车为例,需要说明的是,在通常情况下,汽车的车身与车轮之间的弹性连接部分,称之为“悬架”、“减震器总成”、“减震器”、“滤波器”,本技术称之为“减震器总成”。其中产生阻尼作用的部分,本技术称之为“减震机构”。本案保护的是至少具有一组第一减震装置和第二减震装置的减震器总成,任何并联和串联这组内容的,都在本案的保护范围内。本方案以汽车减震器总成为例,说明本案的结构和原理,弹性元件可以是弹簧、气囊、钢板等。
46.如图1以及图5至图9所示,本发明提供了一种减震器总成,其包括第一减震装置和第二减震装置。其中,第一减震装置包括至少一个第一弹性机构21和至少一个第一减震机构11,第一弹性机构21与第一减震机构11并联设置,若设置多个第一减震机构11和多个第一弹性机构21,则可串联或并联设置。第二减震装置包括至少一个第二弹性机构22和至少一个第二减震机构12,第二弹性机构22与第二减震机构12并联设置,若设置多个第二减震机构12和多个第二弹性机构22,则可串联或并联设置。减震器总成被压缩的行程中,第一减
震机构11的阻尼系数远小于第二减震机构12的阻尼系数;减震器总成伸张的行程中,第二减震机构12的阻尼系数远小于第一减震机构11的阻尼系数。具体地,第一减震机构11自身压缩行程的阻尼系数小于第一减震机构11自身伸张行程的阻尼系数;第二减震机构12自身压缩行程的阻尼系数大于第二减震机构12自身伸张行程的阻尼系数。
47.如图10所示,第一减震装置还包括第一限位机构,第二减震装置还包括第二限位机构;在静止状态下,减震器总成的支撑力与被减震物体的压力相等后,第一减震机构11和第二减震机构12均保持静止状态;第一限位机构设置于第一减震机构11上,第一限位机构用于限制第一减震机构11只能在静止状态与被压缩状态之间切换;第二限位机构设置于第二减震机构12上,第二限位机构用于限制第二减震机构12只能在静止状态与被拉伸状态之间切换。优选地,第一限位机构为第一浮动活塞31,第二限位机构为第二浮动活塞32。第一浮动活塞31套设于第一减震机构11的缸体内,第二浮动活塞32套设于第二减震机构12的缸体内,第一浮动活塞31通过弹簧连接第一减震机构11的缸体,第二浮动活塞32通过弹簧连接第二减震机构12的缸体。在静止状态下,减震器总成的支撑力与被减震物体的压力相等后,第一减震机构11和第二减震机构12的活塞均停在静载荷平衡点,第一浮动活塞31的端面位于第一减震机构11的静载荷平衡点,第一减震机构11的活塞与第一浮动活塞31抵接,第二浮动活塞32位于第二减震机构12的静载荷平衡点,第二减震机构12的活塞与第二浮动活塞32抵接。以实施例1的结构对第一浮动活塞31和第二浮动活塞32的结构及安装位置进行说明,参见图10,第一减震机构11的活塞向下运动时阻尼系数很小,理想状态下甚至可以设置为零,因此,在第一减震机构11的缸体的顶部设置第一浮动活塞31,第一浮动活塞31的上端通过一个小弹簧连接第一减震机构11的缸体的顶部,通过第一浮动活塞31限制第一减震机构11的活塞只能从载荷平衡点沿着阻尼小的方向向下运动。第二减震机构12的活塞向下运动时阻尼系数很小,理想状态下甚至可以设置为零,因此,在第二减震机构12的缸体的顶部设置第二浮动活塞32,第二浮动活塞32的上端通过一个小弹簧连接第二减震机构12的缸体的顶部,通过第二浮动活塞32限制第二减震机构12的活塞只能从载荷平衡点沿着阻尼小的方向向下运动。
48.具体地,一个完整的减震器总成中,从限位位置开始,一个减震装置只对单一方向的激励产生反应动作,另一个减震装置则对相反方向的激励产生反应动作。还是以汽车为例,减震器总成在在静止状态拉伸或压缩的阻尼系数都很小甚至在理想状态下可以设置为零,完全解放了弹性机构的速度,对路面的激励瞬间反应,只要弹性机构反应速度能满足实际路况,路面的起伏波动造成的激励不会传导到车身。减震器总成在静止状态下开始的压缩行程中,第一减震装置的第一弹性机构21不受第一减震机构11的限制或很少受限制而完全弹性的,随车轮接近车身而被压缩,此时第二减震装置的第二减震机构12则是阻尼系数很大,只能作为一个整体随车轮一起向上运动;减震器总成在静止状态下开始的伸张行程中,第一减震装置的第一减震机构11的阻尼系数很大,与车身位置保持不变,第二减震装置的第二弹性机构22不受第二减震机构12的限制或很少受限制而完全弹性的,随车轮远离车身,被第二弹性机构22伸张而弹开。本发明通过两个减震装置串联或并联的结构,将激励动能完全吸收转换为势能或其他能量,有效地防止了激励动能传递到车身而产生震动。将第一减震机构11的收缩阻尼和第二减震机构12的伸张阻尼设置成很小甚至在理想状态下可以设置为零,而将第一减震机构11的伸张阻尼和第二减震机构12的收缩阻尼设置成很大,
解决了被减震目标物体在经过激励点时减震器总成反应迟滞以及激励过后弹跳抑制差的问题,从而解决了减震器总成在激励瞬间的快速反应和抑制激励过后的弹跳之间的矛盾,兼顾了平顺、操控、安全和节能。
49.第一减震机构11与第二减震机构12串联设置。第一减震机构11和第二减震机构12的缸体内填充气体或液压油等介质,第一减震机构11和第二减震机构12的活塞杆的第一端均从缸体的第一端伸出。当减震器总成被压缩的行程中,第一减震机构11的阻尼系数远小于第二减震机构12的阻尼系数,甚至在理想状态下可以将第一减震机构11设置成零阻尼而将第二减震机构12设置成阻尼无穷大,缺少第一减震机构11的限制,第一弹性机构21的压缩速度可以达到无限大,减少第一减震装置的响应时间,由于第二减震机构12的阻尼较大,无法被快速压缩,保持原有的支撑力,提高了减震器总成压缩的响应时间。减震器总成伸张的行程中,第二减震机构12的阻尼系数远小于第一减震机构11的阻尼系数,甚至在理想状态下可以将第二减震机构12的设置成零阻尼而第一减震机构11设置成阻尼无穷大,减少第二减震机构12的限制,第二弹性机构22能够快速弹开,加大第二减震装置的响应速度,甚至可以达到无限大,由于第一减震机构11的阻尼较大,无法快速弹开,保持原有的支撑力,提高了减震器总成伸张的响应时间。在一个减震器总成的所有减震机构中,在被减震的目标物体接近或远离支撑点的行程中,至少有一个减震器的阻尼系数大小和方向组合与其他减震器相反,即:在一个减震器总成的所有减震器中,至少有一个减震机构在被减震的目标物体接近支撑点的行程中阻尼较大而在被减震的目标物体远离支撑点的行程中阻尼较小,并且至少有另外一个减震机构在被减震的目标物体接近支撑点的行程中阻尼较小而在被减震的目标物体远离支撑点的行程中阻尼较大。
50.实施例1,其结构参见图1,第一减震机构11和第二减震机构12背向设置,第一减震机构11和第二减震机构12的活塞杆的第一端朝向相反的方向,第一减震机构11的缸体的第二端与第二减震机构12的缸体的第二端连接,优选地,第一减震机构11和第二减震机构12的活塞杆的中轴线位于同一直线上。被减震物体与第一减震机构11的活塞杆的第一端连接,第二减震机构12的活塞杆的第一端与支撑点抵接。减震器总成的支撑力与被减震物体的重力相等后,第一减震机构11和第二减震机构12的活塞均处于静止状态。第一减震机构11被拉伸的阻尼始终大于第一减震机构11被压缩运动的阻尼。第二减震机构12被拉伸的阻尼始终小于第二减震机构12被压缩的阻尼。
51.实施例2,其结构参见图5,第一减震机构11和第二减震机构12嵌套设置,第一减震机构11的缸体部分或全部套设在第二减震机构12的缸体内,第二减震机构12的活塞杆为中空管状,第二减震机构12的活塞为圆环状,第二减震机构12的活塞杆和活塞均套设在第一减震机构11的缸体上,形成嵌套的结构,第一减震机构11和第二减震机构12的活塞杆的第一端朝向相反的方向,优选地,第一减震机构11和第二减震机构12的活塞杆的中轴线位于同一直线上。被减震物体与第一减震机构11的活塞杆的第一端连接,第二减震机构12的活塞杆的第一端与支撑点抵接。减震器总成的支撑力与被减震物体的重力相等后,第一减震机构11和第二减震机构12的活塞均处于静止状态。第一减震机构11被拉伸的阻尼始终大于第一减震机构11被压缩运动的阻尼。第二减震机构12被拉伸的阻尼始终小于第二减震机构12被压缩的阻尼。与实施例1的结构相比,在减震器总成的长度相同的情况下,增大了第一减震机构11和第二减震机构12的活塞杆的总行程,有效地缩小了减震器总成的安装空间,
可以应用于要求悬架行程大的车辆或装载装置,如越野车、特种运输设备等,也可以应用到具有相同或相似问题的其他领域。
52.实施例3,其结构参见图6,第一减震机构11和第二减震机构12同向设置,也即第一减震机构11和第二减震机构12的活塞杆的第一端朝向相同的方向。第一减震机构11的活塞杆的第一端与第二减震机构12的缸体的第二端连接,优选地,第一减震机构11和第二减震机构12的活塞杆的中轴线位于同一直线上。被减震物体与第一减震机构11的活塞杆的第一端连接,第二减震机构12的活塞杆的第一端与支撑点抵接。减震器总成的支撑力与被减震物体的重力相等后,第一减震机构11和第二减震机构12的活塞均处于静止状态。第一减震机构11被拉伸的阻尼始终大于第一减震机构11被压缩的阻尼。第二减震机构12被拉伸的阻尼始终小于第二减震机构12被压缩的阻尼。
53.实施例4,其结构参见图7,第一减震机构11和第二减震机构12对向设置,第一减震机构11和第二减震机构12的活塞杆的第一端相对设置且相互连接,优选地,第一减震机构11和第二减震机构12的活塞杆的中轴线位于同一直线上。被减震物体与第一减震机构11的活塞杆的第一端连接,第二减震机构12的活塞杆的第一端与支撑点抵接。减震器总成的支撑力与被减震物体的重力相等后,第一减震机构11和第二减震机构12的活塞均处于静止状态。第一减震机构11被拉伸的阻尼始终大于第一减震机构11被压缩运动的阻尼。第二减震机构12被拉伸的阻尼始终小于第二减震机构12被压缩的阻尼。
54.减震器总成的工作过程(以汽车为例):
55.减震器总成的静止状态参见图1,经过路面凸起时,车轮碾压凸起的瞬间,第一减震机构11的收缩阻尼很小甚至在理想状态下可以设置为零,第一弹性机构21不受第一减震机构11牵制而迅速被压缩,减震器总成处于第一状态,参见图2,将路面冲击的全部激励动能通过变形转化为势能储存而不传递到车身,车身没有抬升,同时,因第一减震机构11的伸张阻尼较大而伸张缓慢,车身只能被第一弹性机构21缓慢抬升,车身平稳前行。在车轮越过凸起顶点后,第一减震机构11还未回位,车轮将要悬空,此时,因第二减震机构12的伸张阻尼很小甚至在理想状态下可以设置为零,第二弹性机构22不受第二减震机构12牵制而迅速伸长,减震器总成处于第二状态,参见图3,将车轮推向地面,避免车轮悬空,下一个瞬间,车身因自身重力而下落,而第二减震机构12的压缩阻尼较大,会对车身产生足够的支撑,防止车身迅速下落。越过路面凸起后,第一减震机构11与第二减震机构12同时向载荷平衡点缓慢复位,将路面波动消化在减震器总成内部而不传递到车身,车身始终保持稳定。
56.经过路面坑凹且坑凹长度较小时,在车轮进入坑凹的瞬间,车轮将要悬空,第二减震机构12的伸张阻尼很小甚至在理想状态下可以设置为零,第二弹性机构22不受减震器牵制而瞬时伸长,减震器总成处于第三状态,参见图4,将车轮推向地面,并因第二减震机构12的压缩阻尼较大对车身产生足够的支撑。车轮越过坑凹,第一减震机构11被压缩抵消第二减震机构12的伸张长度,减震器总成处于第二状态,参见图3,然后,第一减震机构11与第二减震机构12同时缓慢复位,将波动消化在减震器总成内部,车身保持稳定行进。
57.如果坑凹长度较大,则与上述的车轮经过顶点后下降的情形相似,在车轮进入坑凹时,第二减震机构12的伸张阻尼很小甚至在理想状态下可以设置为零,第二弹性机构22不受减震器牵制而瞬时伸长,将车轮推向地面,并因第二减震机构12的压缩阻尼较大对车身产生足够的支撑,车身随第二减震机构12的缓慢压缩而舒缓下降。车轮离开坑凹时,车轮
撞击坑沿,第一减震机构11的收缩阻尼很小甚至在理想状态下可以设置为零,第一弹性机构21不受第一减震机构11牵制而迅速被压缩,将路面冲击的全部能量通过变形储存为势能而不传递到车身,车身没有抬升,同时,因第一减震机构11的伸张阻尼较大而伸张缓慢,车身只能被第一弹性机构21缓慢抬升而保持平稳,之后,车身随第一减震机构11的缓慢伸张而舒缓上升。
58.第一减震机构11与第二减震机构12并联设置,减震器总成还包括连接装置,第一减震机构11和第二减震机构12均与连接装置连接。
59.实施5,其结构参见图8和图9,连接装置为活塞机构13,活塞机构13的活塞杆的第一端从缸体的第一端伸出。第一减震机构11和第二减震机构12的缸体的第二端均与活塞机构13的缸体的侧壁或顶端连接,第一减震机构11和第二减震机构12的缸体的第二端均通过流道连通活塞机构13的缸体连通的顶部,流道内设置有流量控制阀。通过活塞机构13、第一减震机构11和第二减震机构12的缸体内的介质进行力的传递。被减震物体与活塞机构13的缸体的第二端连接,活塞机构13的活塞杆的第一端与支撑点抵接。减震器总成的支撑力与被减震物体的重力相等后,第一减震机构11和第二减震机构12的活塞均处于静止状态。第一减震机构11被拉伸的阻尼始终大于第一减震机构11被压缩运动的阻尼。第二减震机构12被拉伸的阻尼始终小于第二减震机构12被压缩的阻尼。本实施例中,静止状态下,第一弹性机构21和第二弹性机构22均处于拉伸状态,车轮遇到凸起时,活塞机构13的活塞缩回,活塞机构13中的液压油或空气推动第二减震机构12的活塞杆快速伸出,拉伸第二弹性机构22,活塞机构13的活塞杆能够快速缩回,缩小车轮与车身之间的距离,避免车身被抬起。受第二弹性机构22的作用,第二减震机构12的活塞杆缓慢缩回。越过凸起后,第一弹性机构21快速收缩,第一减震机构11的活塞杆受第一弹性机构21的作用而快速缩回,挤压活塞机构13中的液压油或空气,活塞机构13的活塞杆快速伸出,将车轮抵接在地面上。也可以采用第一弹性机构21与第一减震机构11串联,第二弹性机构22与第二减震机构12串联的连接方式,则静止状态下,第一弹性机构21和第二弹性机构22均处于压缩状态,其形态变化与实施1-5相同。
60.减震器总成还包括第一主动控制装置,第一主动控制装置的一种实施例为:第一主动控制装置能够控制第一减震机构11和第二减震机构12的阻尼系数。第一主动控制装置包括流量控制阀和控制器,流量控制阀与控制器连接,控制器为常规设备,能够控制流量控制阀的阀门开度从而控制流量大小。第一减震机构11与第二减震机构12的缸体均被活塞分隔成第一缸和第二缸,第一缸和第二缸之间的连接通道上均设置有流量控制阀。控制器与车辆的行车电脑信号连接,用于获取车辆的加速、刹车以及转弯信息。当控制器获取到车辆的加速、刹车以及转弯信息时,通过减小流量控制阀的阀门开度甚至关闭流量控制阀来增大减震器总成被压缩的行程中第一减震机构11的活塞运动时的阻尼系数,或增大减震器总成伸张的行程中第二减震机构12的活塞运动时的阻尼系数,从而控制和改变减震器伸张和收缩的速度,克服急刹车、急转弯以及急加速时汽车过分前倾、侧倾以及抬头的问题。第一主动控制装置的另一种实施例为:第一主动控制装置包括控制器和主动控制减震器,主动控制减震器与减震器总成并联设置,控制器与主动控制减震器连接用于控制主动控制减震器的阻尼系数。控制器为常规设备,控制器与车辆的行车电脑信号连接,用于获取车辆的加速、刹车以及转弯信息。当控制器获取到车辆的加速、刹车以及转弯信息时,控制主动控制
减震器的阻尼系数,尤其是压缩行程的动作,通过增加主动控制减震器的阻尼,避免减震器总成过度和过快压缩,克服急刹车、急转弯以及急加速时汽车过分前倾、侧倾以及抬头的问题。但是只需在车辆急刹车、急转弯、及路面起伏过大等车身惯性状态发生或即将发生过大的变化时的一瞬间产生控制动作,正常行驶过程的绝大多数时间中,不必要产生控制动作,从而大大减少因控制动作产生的能量损耗。
61.减震器总成还包括第二主动控制装置,第一弹性机构21和第二弹性机构22均与第二主动控制装置连接,第二主动控制装置能够控制第一弹性机构21和第二弹性机构22的弹力,使减震器总成的支撑力以及长度根据不同大小的负载进行调节,以适应不同大小的负载。参见图10,以实施例1应用到汽车上为例进行说明,第二主动控制装置包括第一凸轮机构、第二凸轮机构以及控制器,第一凸轮机构和第二凸轮机构均与控制器连接,控制器为常规设备,用于控制第一凸轮机构和第二凸轮机构的凸轮旋转;第一凸轮机构设置于车身上,第一凸轮机构位于车身与第一弹性机构21之间,第一弹性机构21的上端与第一凸轮机构的凸轮抵接。第二凸轮机构设置于车轮上,第二弹性机构22的下端与第二凸轮机构的凸轮抵接。以静止状态为参照,当控制器控制第一凸轮机构和第二凸轮机构旋转时,第一凸轮机构的凸轮向下推第一弹性机构21,使第一弹性机构21被压缩,缩小了第一弹性机构21的长度,增大了第一弹性机构21的弹力;第二凸轮机构的凸轮向上推第二弹性机构22,使第二弹性机构22被压缩,缩小了第二弹性机构22的长度,增大了第二弹性机构22的弹力。
62.本发明通过两个减震装置串联或并联的结构,将激励动能完全吸收转换为势能,有效地防止了激励动能传递到车身而产生震动。将第一减震机构11的收缩阻尼和第二减震机构12的伸张阻尼设置成很小甚至在理想状态下可以设置为零,而将第一减震机构11的伸张阻尼和第二减震机构12的收缩阻尼设置成较大,解决了被减震目标物体在经过激励点时减震器总成反应迟滞以及激励过后弹跳抑制差的问题,从而解决了减震器总成在激励瞬间的快速反应和抑制激励过后的弹跳之间的矛盾,兼顾了平顺、操控、安全和节能。
63.在本发明的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
64.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“抵接”“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连;可以是两个构件内部的连通或两个构件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
65.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”,可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”,可以是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”,可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度低于第二特征。第一特征和第二特征位置可互换。在本说明书的描述中,术语“一个实施例”、“一些实施例”、“实施例”、“示例”、“具体示例”或“一些示例”等的描述,是指结合该实施例或示例描述的具体
特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
66.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行改动、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1