一种履带式管道检测机器人
1.本发明涉及管道巡检领域的一种巡检机器人,具体涉及一种基于履带式的管道越障巡检机器人。
背景技术:
2.随着我国经济的迅速发展,基础设施建设稳步进行,管道被大量应用在基础建设之中。由于其所运输物料的化学性质以及外界因素影响下,管道会发生损耗,面对分布密集、体量巨大的管道系统,及时发现与处理管道的损伤成为一项重要任务。
3.管道机器人在工作人员操作下,可携带若干检测或维护仪器进行一系列管道作业的机、电、仪一体化系统。现役的管道检测机器人一般分为:轮式管道机器人、轨道式管道机器人、履带式管道机器人等,轮式结构管道机器人,因为其机械结构相对简单便于维护,被广泛运用于管道作业,但管道内环境错综复杂,经常会出现干扰因素,普通轮式结构并不能很好适应管道环境;轨道式管道机器人需要在管道内铺设滑轨,极大增加了建设成本,且轨道式机器人只能沿轨道路径前进,检测盲区较大。相比于以上两种结构,履带式管道检测机器人拥有较强的越障能力并可相对自由运动。但因为管道内复杂的地形环境,研究如何提高管道机器人的越障能力和检测能力具有重要意义。
技术实现要素:
4.本发明的目的在于提出了一种履带式管道检测机器人,以履带作为驱动方式,通过对履带组进行改进从而实现避障;摄像机安装在升降机构上,便于更好地观测到管道内部情况。
5.本发明的技术方案如下:
6.本发明包括机身、升降机构、驱动机构和检测机构;机身的两侧分别安装有对应的驱动机构,机身上安装有升降机构,升降机构与检测机构相连;机器人放置在管道内,机身两侧的驱动机构与管道内壁接触;驱动机构的控制,带动机器人向前运动以及跨越障碍;当需要观察管道时,升降机构的启动,使得检测机构举升,检测机构对管道内壁进行探查。
7.所述机身包括机身底座、机身上盖和车灯,机身底座上固定安装有机身上盖,机身上盖上固定安装有升降机构,机身底座的前部对称地设置有两个车灯,机身底座的两侧部与对应的驱动机构相连。
8.所述升降机构包括升降机构底壳、升降上杆、升降下杆、液压杆、云台;
9.升降机构底壳固定安装在机身上,液压杆的一端安装在升降机构底壳上,液压杆的另一端与云台相连,升降机构底壳与云台的两侧面之间安装有对应的升降上杆和升降下杆,升降机构底壳与云台每侧的升降上杆和升降下杆之间间隔布置,并且每侧的升降上杆的上下两端分别与云台和升降机构底壳的对应侧面铰接以及每侧的升降下杆的上下两端分别与云台和升降机构底壳的对应侧面铰接,云台的前端安装有检测机构。
10.所述检测机构包括旋转电机、摄像机支架、圆形电机和摄像机;
11.旋转电机与升降机构前端固定连接,旋转电机的输出轴与摄像机支架相连,摄像机安装在摄像机支架中,圆形电机固定安装在摄像机支架的一侧,圆形电机的输出轴与摄像机连接;旋转电机用于驱动检测机构整体周向旋转,圆形电机用于调节摄像机的光轴。
12.所述机身两侧的驱动机构结构相同,包括履带外板、主动轮、从动轮、越障轮、越障下板、越障上板、弹簧、主动轮杆、从动轮杆、越障轮杆、轮杆支架、第一斜齿轮、第二斜齿轮、第三斜齿轮、第四斜齿轮、驱动电机、驱动电机齿轮箱、越障电机、越障电机齿轮箱和履带;
13.主动轮和从动轮设置在机身侧面的前部和后部,主动轮杆的一端与主动轮同轴固连,机身内安装有第一斜齿轮、第二斜齿轮、驱动电机和驱动电机齿轮箱,驱动电机的输出轴通过驱动电机齿轮箱与第一斜齿轮同轴连接,第一斜齿轮与第二斜齿轮啮合形成第一双斜齿轮副,主动轮杆的另一端穿过机身侧面后与第二斜齿轮同轴相连,从动轮通过从动轮杆与机身相连,从动轮杆通过轮杆支架安装在机身内;
14.主动轮和从动轮之间通过对应的履带外板相连,履带外板的前后端部分别与主动轮杆和从动轮杆的一端相连,履带外板的中部开设有安装孔,越障轮杆的一端与越障下板的下端部固定连接,机身内安装有第三斜齿轮、第四斜齿轮、越障电机和越障电机齿轮箱,越障电机的输出轴通过越障电机齿轮箱与第三斜齿轮同轴连接,第三斜齿轮与第四斜齿轮啮合形成第二双斜齿轮副,越障轮杆的另一端依次穿过履带外板中部的安装孔和机身侧面后与第四斜齿轮同轴连接,越障下板的上端部通过弹簧与对应的越障上板的下端部相连,越障上板的上端部与越障轮相连,主动轮、从动轮和越障轮外套设有对应的履带;越障电机的驱动带动越障电机齿轮箱,进而带动第二双斜齿轮副以及越障轮杆转动,使得越障下板和越障上板绕着越障轮杆转动,最终带动越障轮在履带内移动,移动过程中,主动轮、从动轮和越障轮三者在一条直线上,或者主动轮、从动轮和越障轮三者作为三角形的顶点,使得履带呈三角形,履带始终处于张紧状态。
15.所述越障下板的上端部通过弹簧与对应的越障上板的下端部相连,具体为:
16.越障下板的上端部内开设有两个平行且间隔布置的条形槽,越障上板的下端部设置为两个分支条,两个分支条之间的间隙中安装有弹簧,越障上板下端部的两个分支条分别嵌装在越障下板上端部的两个条形槽中,两个分支条之间的弹簧与两个条形槽之间的越障下板接触并压缩,越障下板、越障上板和弹簧形成越障轮的越障调节板。
17.所述机身侧面开设有多个轮杆孔,多个轮杆孔中均安装有对应的轴承,主动轮杆和从动轮杆和越障轮杆与机身侧面对应的轮杆孔中的轴承同轴连接。
18.机身内的上表面安装有多个轮杆支架,多个轮杆支架内均安装有支架轴承,主动轮杆和从动轮杆和越障轮杆通过对应轮杆支架和支架轴承安装在机身内的上表面。
19.所述升降机构的升降上杆和升降下杆的转动角度设置为3
°
至90
°
。
20.本发明的有益效果为:
21.本发明的驱动机构以履带作为行走装置,由主动轮、从动轮和越障轮构成履带轮系,越障轮通过越障下板和越障上板安装在机身侧面,可绕机身作圆周运动,从而改变履带形状,使机器人完成障碍跨越,越障上板套在越障下板上,且内部安装弹簧,在履带总长不变情况下,改变越障轮距中心的距离,且使越障轮紧套于履带内;可实现管道检测机器人工作过程中跨越障碍,搭载的检测机构配合升降机构能观测到管道内各处情况,机器人可以适应较为恶劣的工作环境,提高管道检测和维护的效率。
附图说明
22.图1为本发明的整体结构示意图;
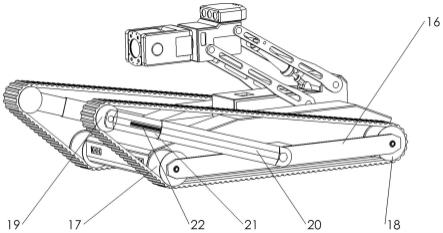
23.图2为驱动机构的结构示意图;
24.图3为驱动机构的局部放大剖面示意图;
25.图4为升降机构和检测机构的结构示意图;
26.图5为机身机构的结构示意图;
27.图6为本发明收纳状态示意图;
28.图7为本发明工作状态的各个状态图。
29.图中:机身底座1、机身上盖2、车灯3、升降机构底壳4、升降上杆5、升降下杆6、连接栓7、液压杆8、液压连杆9、云台10、探照灯11、旋转电机12、摄像机支架13、圆形电机14、摄像机15、履带外板16、主动轮17、从动轮18、越障轮19、越障下板20、越障上板21、弹簧22、主动轮杆23、从动轮杆24、越障轮杆25、轴承26、轮杆支架27、第一斜齿轮28、第二斜齿轮29、驱动电机30、驱动电机齿轮箱31、越障电机32、越障电机齿轮箱33、履带34、第三斜齿轮35、第四斜齿轮36。
具体实施方式
30.下面结合附图及实施例对本发明做进一步说明。
31.如图1所示,本发明包括机身、升降机构、驱动机构和检测机构;机身的两侧分别安装有对应的驱动机构,机身上安装有升降机构,升降机构与检测机构相连;机器人放置在管道内,机身两侧的驱动机构与管道内壁接触;驱动机构的控制,带动机器人向前运动以及跨越障碍;当需要观察管道时,升降机构的启动,使得检测机构举升,检测机构对管道内壁进行探查。
32.如图5所示,机身包括机身底座1、机身上盖2和车灯3,机身底座1上固定安装有机身上盖2,机身上盖2上固定安装有升降机构的升降机构底壳4,机身上盖2的上表面中部开设有凹槽,用于放置的升降机构和检测机构,从而保护升降机构和检测机构,如图6所示,机身底座1的前部对称地设置有两个车灯3,机身底座1的两侧部与对应的驱动机构相连。
33.如图4所示,升降机构包括升降机构底壳4、升降上杆5、升降下杆6、连接栓7、液压杆8、液压连杆9、云台10和探照灯11;升降机构底壳4固定安装在机身的机身上盖2上,液压杆8的一端通过连接栓7安装在升降机构底壳4上,液压杆8的另一端通过液压连杆9与云台10的后部相连,升降机构底壳4与云台10的两侧面之间安装有对应的升降上杆5和升降下杆6,升降机构底壳4与云台10每侧的升降上杆5和升降下杆6之间间隔布置,并且每侧的升降上杆5的上下两端分别与云台10和升降机构底壳4的对应侧面铰接以及每侧的升降下杆6的上下两端分别与云台10和升降机构底壳4的对应侧面铰接,液压杆8设置在两侧的升降上杆5和升降下杆6之间,云台10上还固定安装有探照灯11,云台10的前端安装有检测机构的旋转电机12。
34.检测机构包括旋转电机12、摄像机支架13、圆形电机14和摄像机15;旋转电机12与升降机构的云台10前端固定连接,旋转电机12的输出轴与摄像机支架13相连,摄像机15安装在摄像机支架13中,圆形电机14固定安装在摄像机支架13的一侧,圆形电机14的输出轴与摄像机15连接;旋转电机12用于驱动检测机构整体周向旋转,圆形电机14用于调节摄像
机15的光轴。
35.如图2所示,机身两侧的驱动机构结构相同,包括履带外板16、主动轮17、从动轮18、越障轮19、越障下板20、越障上板21、弹簧22、主动轮杆23、从动轮杆24、越障轮杆25、轴承26、轮杆支架27、第一斜齿轮28、第二斜齿轮29、第三斜齿轮35、第四斜齿轮36、驱动电机30、驱动电机齿轮箱31、越障电机32、越障电机齿轮箱33和履带34;
36.主动轮17和从动轮18设置在机身的机身底座1侧面的前部和后部,主动轮杆23的一端与主动轮17同轴固连,机身的机身底座1内安装有第一斜齿轮28、第二斜齿轮29、驱动电机30和驱动电机齿轮箱31,驱动电机30固定安装在机身的机身底座1内,驱动电机30的输出轴通过驱动电机齿轮箱31与第一斜齿轮28同轴连接,第一斜齿轮28与第二斜齿轮29啮合形成第一双斜齿轮副,主动轮杆23的另一端穿过机身的机身底座1侧面后与第二斜齿轮29同轴相连,从动轮18通过从动轮杆24与机身的机身底座1相连,从动轮杆24通过轮杆支架27安装在机身的机身底座1内,具体实施中,两侧的驱动机构的从动轮18之间通过同一根从动轮杆24相连,主动轮杆23、从动轮杆24与机身底座1的侧面之间通过轴承26相连,主动轮杆23、从动轮杆24的中部通过至少一个轮杆支架27和支架轴承安装在机身底座1内。
37.主动轮17和从动轮18之间通过对应的履带外板16相连,履带外板16的前后端部分别与主动轮杆23和从动轮杆24的一端相连,履带外板16的中部开设有安装孔,越障轮杆25的一端与越障下板20的下端部固定连接,机身的机身底座1内安装有第三斜齿轮35、第四斜齿轮36、越障电机32和越障电机齿轮箱33,越障电机32的输出轴通过越障电机齿轮箱33与第三斜齿轮35同轴连接,第三斜齿轮35与第四斜齿轮36啮合形成第二双斜齿轮副,越障轮杆25的另一端依次穿过履带外板16中部的安装孔和机身的机身底座1侧面后与第四斜齿轮36同轴连接,具体实施中,两侧的驱动机构的越障轮19、越障下板20、越障上板21由共同的第三斜齿轮35、第四斜齿轮36、越障电机32和越障电机齿轮箱33进行驱动,两侧的越障下板20之间通过同一根越障轮杆25进行连接,越障轮杆25与机身底座1的侧面之间通过轴承26相连,越障轮杆25的中部通过至少一个轮杆支架27和支架轴承安装在机身底座1内。越障下板20的上端部通过弹簧22与对应的越障上板21的下端部相连,越障上板21的上端部与越障轮19相连,主动轮17、从动轮18和越障轮19外套设有对应的履带34;越障电机32的驱动带动越障电机齿轮箱33,进而带动第二双斜齿轮副以及越障轮杆25转动,使得越障下板20和越障上板21绕着越障轮杆25转动,最终带动越障轮19在履带内移动,移动过程中,主动轮17、从动轮18和越障轮19三者在一条直线上,或者主动轮17、从动轮18和越障轮19三者作为三角形的顶点,使得履带34呈三角形,履带34始终处于张紧状态。
38.如图3所示,越障下板20的上端部通过弹簧22与对应的越障上板21的下端部相连,具体为:越障下板20的上端部内开设有两个平行且间隔布置的条形槽,越障上板21的下端部设置为两个分支条,两个分支条之间的间隙中安装有弹簧22,越障上板21下端部的两个分支条分别嵌装在越障下板20上端部的两个条形槽中,两个分支条之间的弹簧22与两个条形槽之间的越障下板20接触并压缩,越障下板20、越障上板21和弹簧22形成越障轮19的越障调节板,使得越障轮19在履带34内移动过程中履带34始终处于张紧状态。
39.套在主动轮17、从动轮18和越障轮19上的履带周长固定,所以越障上板21和越障下板20嵌套安装,内部安装弹簧22,三者组成长度可变的越障调节板,当越障轮19绕机身旋转时,因为履带34周长固定,所以越障调节板会随之伸长或者缩短,弹簧22目的是为了使越
障上板21紧套与履带34中。
40.本发明的运动过程是:
41.管道检测机器人在正常运行时驱动电机30与驱动电机齿轮箱31配合运行带动第一斜齿轮副,最终通过主动轮23驱动履带34向前移动。
42.如图7所示,当机器人在运行过程中遇到障碍物时,按照以下方式越障:
43.当驱动机构中的履带34接触障碍物时,越障电机正向工作,带动越障下板20和越障上板21转动,从而使越障轮19绕越障轮杆25向下旋转,转至越障轮19、主动轮17和从动轮18呈水平状态(即在一条直线上),机器人履带34继续运动,跨越障碍物;跨越障碍物后,越障电机反向工作,带动越障下板20和越障上板21转动,从而使越障轮19绕越障轮杆25向上旋转,越障轮19设置在主动轮17的斜上方。
44.当机器人需要对管道内壁进行检测时,液压杆8工作,带动升降上杆5绕升降机构底壳转动,从而抬升云台10;检测机构安装在云台10上,旋转电机12用于在机器人主视角方向转动摄像机支架13,圆形电机14用于在机器人左视角方向上转动摄像机15,从而使得摄像机15实现多角度旋转,获得最佳观察视角,探照灯11为观测作业提供稳定光源;
45.本发明未尽事宜为公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1