安防巡检装置及其使用方法与流程
1.本技术涉及安防装置技术领域,更具体地说,涉及安防巡检装置及其使用方法。
背景技术:
2.在安防巡检系统中,安防巡检装置必不可少,并且由传统的人工跟随巡检发展到摄像头自动巡检。
3.相关技术中,由于传统的人工巡检工作量较大,并且对人力消耗严重,导致相关巡检工作人员大量流失,为了使安防巡检工作可以正常进行,一般通过巡检机器人自动完成,以代替传统的人工巡检和提高工作效率,例如现有技术公开号为cn108284427a的文献提供一种安防机器人及其自动巡检方法,该装置通过3d激光,结合惯性导航的技术,使机器人能够高精度、稳定地在园区等室内外各种环境下,实现自主定位、行走与工作,能够实现全方位、无死角、低成本的安全防护。
4.但是上述技术方案中当室外巡检遇到炎热天气或者下雨天时,强烈的阳光会影响探头采集信息,并且会让机器人整体温度升高,当下雨天时无法对探头进行遮雨,户外防护效果较差。
技术实现要素:
5.1.要解决的技术问题
6.本技术的目的在于提供安防巡检装置及其使用方法,解决了巡检机器人户外防护效果较差的技术问题,实现了可对机器人进行遮阳和遮雨的技术效果。
7.2.技术方案
8.本技术提供了安防巡检装置,包含:
9.安装板,所述安装板固定设置于巡检机器人的移动平台上;
10.升降板,所述升降板位于安装板的顶部,所述升降板顶部固定设置有支撑柱,所述支撑柱顶部转动设置有用于安防巡检的旋转探头;
11.电机,所述电机固定设置于升降板的顶部,所述电机驱动升降组件带动所述升降板升降;
12.立柱,所述立柱滑动设置于升降板的顶部,所述立柱的一侧转动设置有遮挡板,所述遮挡板的顶部与立柱的顶部转动设置;
13.传动组件a,所述传动组件a在所述电机的驱动下带动所述立柱和遮挡板向所述旋转探头靠近,且所述传动组件a通过传动组件b驱动所述遮挡板转动,所述传动组件a在限位组件的作用下脱离所述电机的驱动,所述传动组件a在助推组件的作用下与电机的驱动端传动设置。
14.通过采用上述技术方案,将安装板与机器人移动平台固定装配后,在移动平台的带动下使安装板和升降板带动旋转探头移动巡检,在巡检过程中,电机通过升降组件驱动升降板进行升降,进而使升降板带动旋转探头对巡检高度进行调节,此时在限位组件的作
用下电机无法驱动传动组件a运行,当需要对旋转探头遮挡防护时,再通过助推组件将传动组件a与电机之间联动,使电机带动传动组件a运行,使传动组件a带动立柱向旋转探头靠近,在靠近的过程中传动组件a通过带动传动组件b驱动立柱内侧的遮挡板转动,当立柱停止移动时,遮挡板刚好位于旋转探头的上方,对旋转探头起到了防护的效果。
15.作为本技术文件技术方案的一种可选方案,所述升降组件包括从动齿轮,所述从动齿轮转动设置于升降板的内侧,所述从动齿轮外侧对称啮合设置有齿轮a,所述齿轮a外侧同轴固定设置有蜗杆,所述蜗杆外侧啮合传动有蜗轮,所述蜗轮转动设置于升降板的底部,所述蜗轮内侧螺纹设置有丝杆a,所述丝杆a固定设置于安装板的顶部,所述安装板顶部对称固定设置有滑杆,所述滑杆与升降板滑动设置,所述从动齿轮外侧啮合设置有主动齿轮,所述主动齿轮在所述电机的驱动下转动。
16.通过采用上述技术方案,当电机驱动主动齿轮转动时,主动齿轮带动外侧啮合设置的从动齿轮转动,从动齿轮同步带动外侧啮合设置的齿轮a转动,使齿轮a带动同轴设置的蜗杆转动。蜗杆在转动时带动蜗轮在升降板的底部转动,使蜗轮驱动内侧螺纹连接的丝杆a上下进给,进而使丝杆a带动安装板移动,可对安装板和升降板之间的距离调节,并且在调节过程中,通过安装板顶部的滑杆保证了升降板升降稳定性。
17.作为本技术文件技术方案的一种可选方案,所述传动组件a包括连接块,所述连接块两侧均通过连接轴转动设置有齿轮b,所述齿轮b底部均啮合设置有齿板,所述齿板固定固定设置于升降板的顶部,所述齿板外侧固定设置有滑轨,所述滑轨滑动设置于立柱的底部,所述齿轮b通过所述传动组件b驱动所述遮挡板转动,所述连接块在所述电机的驱动下水平移动。
18.通过采用上述技术方案,使连接块通过连接轴带动齿轮b在齿板的顶部滚动,当齿轮b滚动时带动立柱在滑轨的顶部滑动,进而使立柱带动遮挡板向旋转探头靠近。
19.作为本技术文件技术方案的一种可选方案,所述传动组件b包括链轮a和链轮b,所述链轮a与齿轮b同轴固定设置,所述链轮b固定设置于遮挡板顶部的两侧,所述链轮a和链轮b之间通过链条传动设置,所述链轮a和链轮b外侧设置有防护壳,所述防护壳固定设置于立柱的外侧。
20.通过采用上述技术方案,当齿轮b转动时会带动链轮a转动,链轮a通过链条驱动链轮b转动,使链轮b带动遮挡板在立柱之间转动,进而使传动组件a同步带动遮挡板翻转。
21.作为本技术文件技术方案的一种可选方案,所述连接块内侧螺纹设置有丝杆b,所述丝杆b在所述电机的驱动下转动,所述丝杆b的两端均设置有平滑段,两端的所述平滑段外侧均设置有限位组件和助推组件,所述连接块在所述限位组件的作用下与丝杆b相互脱离,所述连接块在所述助推组件的作用下与丝杆b螺纹配合,所述限位组件和助推组件均位于防护罩的内部,所述防护罩固定设置于升降板的顶部。
22.通过采用上述技术方案,当电机驱动丝杆b转动时,在助推组件的助力下可将位于平滑段外侧的齿轮b推到丝杆b的外侧,使丝杆b与齿轮b配合,进而在丝杆b的驱动下使连接块移动。
23.作为本技术文件技术方案的一种可选方案,所述限位组件包括支架,所述支架固定设置于升降板的顶部,所述支架靠近所述丝杆b的一端通过转轴转动设置有限位块,所述转轴外侧与限位块之间设置有扭簧,所述支架内侧设置有用于锁紧所述限位块的锁合组
件。
24.通过采用上述技术方案,当连接块移动到平滑段外侧时,连接块会触发支架上的锁合组件,使锁合组件解除对限位块的锁定,此时限位块在扭簧的作用下向连接块的外侧压紧,随着连接块与丝杆b相互脱离,在限位块的作用下将连接块推到平滑段的外侧,当连接块再次与丝杆b配合时,通过助推组件推动连接块向丝杆b靠近,此时连接块推动限位块转动,同时锁合组件在不受连接块外力的作用下自动复位,当连接块与丝杆b配合后,锁合组件自动复位对限位块自动锁紧,以此类推,可防止传动组件a在不需要使用时被电机驱动。
25.作为本技术文件技术方案的一种可选方案,所述锁合组件包括滑块,所述滑块滑动设置于支架的内侧,所述滑块底部固定设置有推板,所述推板外侧转动设置有弹性棘爪,且固定设置有用于对所述弹性棘爪限位的限位杆,所述弹性棘爪卡合设置于棘轮的外侧,所述滑块远离所述限位块的一侧位于支架的内侧固定设置有弹簧a。
26.通过采用上述技术方案,当连接块推动推板时会带动滑块在支架的内侧滑动,此时滑块将弹簧a压缩,并且带动弹性棘爪远离棘轮解除对限位块的锁紧,当连接块离开推板时,在弹簧a的作用下使滑块带动弹性棘爪自动复位,当连接块离开限位组件时弹性棘爪再次对棘轮锁紧,进而使限位块复位。
27.作为本技术文件技术方案的一种可选方案,所述助推组件包括固定座,所述固定座固定设置于升降板的顶部,所述固定座靠近丝杆b的一侧固定设置有弹簧b,所述弹簧b另一端固定设置有推环,所述弹簧b和推环均位于平滑段的外侧,所述推环外侧固定设置有连接板,所述连接板外侧固定设置有液压推杆,所述液压推杆与限位组件固定设置。
28.通过采用上述技术方案,当连接块与丝杆b配合时,首先对助推组件中的液压推杆泄压,使弹簧b通过推环对连接块挤压,连接块在弹簧b的辅助下克服限位块的阻力向丝杆b靠进,使丝杆b在转动时与连接块配合,当丝杆b与连接块配合后,再通过液压推杆拉动连接板带动推环复位,复位状态下的弹簧b处于压缩状态。
29.作为本技术文件技术方案的一种可选方案,所述遮挡板外侧设置有太阳能板。
30.通过采用上述技术方案,在日常巡检过程中,通过遮挡板外侧的太阳能板为机器人补充电量,当需要遮挡板对旋转探头防护时,再将太阳能板转动到遮挡板的底部,对太阳能板起到了防护效果。
31.本技术还提供了上述安防巡检装置的使用方法,包括:
32.将安装板与机器人移动平台固定装配后,在移动平台的带动下使安装板和升降板带动旋转探头移动巡检;
33.当对旋转探头调节高度时,电机通过升降组件驱动升降板进行升降,进而使升降板带动旋转探头对巡检高度进行调节,此时在限位组件的作用下电机无法驱动传动组件a运行;
34.当需要对旋转探头遮挡防护时,再通过助推组件将传动组件a与电机之间联动,使电机带动传动组件a运行,使传动组件a带动立柱向旋转探头靠近;
35.传动组件a通过带动传动组件b驱动立柱内侧的遮挡板转动,当立柱停止移动时,遮挡板刚好位于旋转探头的上方;
36.传动组件a中的连接块与丝杆b相互脱离,在限位组件的作用下将连接块推到平滑
段的外侧,防止连接块在巡检过程中自行与丝杆b配合;
37.当遮挡板需要收起时,将助推组件中的液压推杆泄压,使弹簧b通过推环对连接块挤压,连接块在弹簧b的辅助下克服限位块的阻力向丝杆b靠进,使丝杆b在转动时与连接块配合;
38.锁合组件自动复位对限位块自动锁紧。
39.3.有益效果
40.本技术技术方案中提供的一个或多个技术方案,至少具有如下技术效果或优点:
41.(1)本技术由于采用了电机驱动遮挡板翻转并且移动到旋转探头的上方,所以有效解决了巡检机器人户外防护效果较差的问题,进而实现了在户外巡检时通过遮挡板对旋转探头遮挡防护,降低高温天气或者雨水对旋转探头的工作和寿命的影响。
42.(2)本技术通过在安装板和升降板之间设置升降组件,通过电机驱动升降组件可对升降板的高度进行调节,使升降板带动旋转探头对巡检高度进行调节。
43.(3)本技术通过在升降板的顶部对称滑动设置立柱,通过立柱对遮挡板支撑,当对旋转探头防护时,使电机通过传动组件a驱动立柱带动遮挡板向旋转探头靠近,同时通过传动组件a带动传动组件b驱动遮挡板进行翻转,使立柱停止移动时,遮挡板刚好位于旋转探头的上方。
44.(4)本技术通过在电机和传动组件a之间设置限位组件,在不需要遮挡板对升降板防护时,在限位组件的作用下电机无法驱动传动组件a运行,保证了电机通过升降组件驱动升降板升降的独立进行。
45.(5)本技术通过在电机和传动组件a之间设置助推组件,当需要驱动遮挡板对旋转探头防护时,通过助推组件将传动组件a与电机之间联动,使电机带动传动组件a正常运行。
附图说明
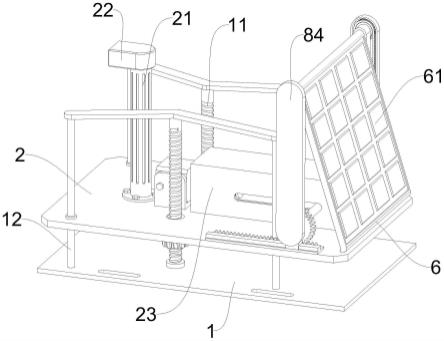
46.图1为本技术一较佳实施例公开的安防巡检装置的整体结构示意图;
47.图2为本技术一较佳实施例公开的安防巡检装置的防护状态结构示意图;
48.图3为本技术一较佳实施例公开的安防巡检装置的整体爆炸结构示意图;
49.图4为本技术一较佳实施例公开的安防巡检装置中升降板的结构示意图;
50.图5为本技术一较佳实施例公开的安防巡检装置中升降板的底部结构示意图;
51.图6为本技术一较佳实施例公开的安防巡检装置中升降板的主视结构示意图;
52.图7为图6中a处的放大结构示意图;
53.图8为本技术一较佳实施例公开的安防巡检装置中限位组件和助推组件的结构示意图;
54.图中标号说明:1、安装板;11、丝杆a;12、滑杆;2、升降板;21、支撑柱;22、旋转探头;23、防护罩;3、电机;31、主动齿轮;32、丝杆b;33、平滑段;4、升降组件;41、从动齿轮;42、齿轮a;43、蜗杆;44、蜗轮;5、立柱;6、遮挡板;61、太阳能板;7、传动组件a;71、连接块;72、连接轴;73、齿轮b;74、齿板;75、滑轨;8、传动组件b;81、链轮a;82、链轮b;83、链条;84、防护壳;9、限位组件;91、支架;92、转轴;93、限位块;94、扭簧;95、锁合组件;951、滑块;952、推板;953、弹性棘爪;954、限位杆;955、棘轮;956、弹簧a;10、助推组件;101、固定座;102、弹簧b;103、推环;104、连接板;105、液压推杆。
具体实施方式
55.以下结合说明书附图对本技术作进一步详细说明。
56.参照图1图2和图3,本技术实施例公开安防巡检装置,包括用于安装在机器人移动平台上的安装板1,安装板1顶部设置有用于调节巡检高度的升降板2,升降板2顶部固定设置有支撑柱21,支撑柱21顶部转动设置有用于安防巡检的旋转探头22,升降板2顶部固定设置有电机3,电机3带动升降组件4驱动升降板2升降,升降板2的顶部对称滑动设置有立柱5,对称设置的立柱5之间转动设置有遮挡板6,遮挡板6的顶部与立柱5的顶部转动设置,电机3通过传动组件a7驱动立柱5向旋转探头22靠近,同时传动组件a7通过传动组件b8驱动遮挡板6向上转动,当传动组件a7和传动组件b8停止运行时,遮挡板6位于旋转探头22的上方,传动组件a7在限位组件9的作用下脱离电机3的驱动,传动组件a7在助推组件10的作用下与电机3传动设置。
57.将安装板1与机器人移动平台固定装配后,在移动平台的带动下使安装板1和升降板2带动旋转探头22移动巡检,在巡检过程中,电机3通过升降组件4驱动升降板2进行升降,进而使升降板2带动旋转探头22对巡检高度进行调节,此时在限位组件9的作用下电机3无法驱动传动组件a7运行,当需要对旋转探头22遮挡防护时,再通过助推组件10将传动组件a7与电机3之间联动,使电机3带动传动组件a7运行,使传动组件a7带动立柱5向旋转探头22靠近,在靠近的过程中传动组件a7通过带动传动组件b8驱动立柱5内侧的遮挡板6转动,当立柱5停止移动时,遮挡板6刚好位于旋转探头22的上方,对旋转探头22起到了防护的效果。
58.参照图3和图5,升降组件4包括从动齿轮41,从动齿轮41外侧对称啮合设置有齿轮a42,齿轮a42的一侧同轴固定设置有蜗杆43,蜗杆43外侧啮合设置有蜗轮44,蜗轮44转动设置于升降板2的底部,蜗轮44的内侧螺纹设置有丝杆a11,丝杆a11固定设置于安装板1的顶部,安装板1顶部对称设置有滑杆12,滑杆12均与升降板2滑动设置,从动齿轮41外侧啮合设置有主动齿轮31,主动齿轮31在电机3的驱动下转动。
59.当电机3驱动主动齿轮31转动时,主动齿轮31带动外侧啮合设置的从动齿轮41转动,从动齿轮41同步带动外侧啮合设置的齿轮a42转动,使齿轮a42带动同轴设置的蜗杆43转动。蜗杆43在转动时带动蜗轮44在升降板2的底部转动,使蜗轮44驱动内侧螺纹连接的丝杆a11上下进给,进而使丝杆a11带动安装板1移动,可对安装板1和升降板2之间的距离调节,并且在调节过程中,通过安装板1顶部的滑杆12保证了升降板2升降稳定性。
60.参照图3和图4,传动组件a7包括连接块71,连接块71两侧均固定设置有连接轴72,连接轴72的另一端均转动设置有齿轮b73,齿轮b73底部啮合设置有齿板74,齿板74固定设置于升降板2的顶部,齿板74的一侧固定设置有滑轨75,滑轨75滑动设置于立柱5的底部,连接块71内侧螺纹设置有丝杆b32,丝杆b32在电机3驱动下转动,丝杆b32的两端均设置有平滑段33,平滑段33外侧设置有限位组件9和助推组件10,限位组件9和助推组件10均位于防护罩23的内部,防护罩23固定设置于升降板2的顶部。
61.当电机3驱动丝杆b32转动时,在助推组件10的助力下可将位于平滑段33外侧的齿轮b73推到丝杆b32的外侧,使丝杆b32与齿轮b73配合,进而在丝杆b32的驱动下使连接块71通过连接轴72带动齿轮b73在齿板74的顶部滚动,当齿轮b73滚动时带动立柱5在滑轨75的顶部滑动,进而使立柱5带动遮挡板6向旋转探头22靠近。
62.参照图3,传动组件b8包括链轮a81和链轮b82,链轮a81与齿轮b73同轴设置,链轮
b82固定设置于遮挡板6顶部的两侧,链轮a81和链轮b82之间通过链条83同步传动,链轮a81、链轮b82和链条83均位于防护壳84的内部,防护壳84固定设置于立柱5的外侧。
63.当齿轮b73转动时会带动链轮a81转动,链轮a81通过链条83驱动链轮b82转动,使链轮b82带动遮挡板6在立柱5之间转动,进而使传动组件a7同步带动遮挡板6翻转。
64.参照图6、图7和图8,限位组件9包括支架91,支架91固定设置于升降板2的顶部,支架91一端通过转轴92转动设置有用于对连接块71限位的限位块93,转轴92的外侧位于支架91和转轴92之间设置有扭簧94,支架91的内侧设置有用于锁合限位块93的锁合组件95。
65.当连接块71移动到平滑段33外侧时,连接块71会触发支架91上的锁合组件95,使锁合组件95解除对限位块93的锁定,此时限位块93在扭簧94的作用下向连接块71的外侧压紧,随着连接块71与丝杆b32相互脱离,在限位块93的作用下将连接块71推到平滑段33的外侧,当连接块71再次与丝杆b32配合时,通过助推组件10推动连接块71向丝杆b32靠近,此时连接块71推动限位块93转动,同时锁合组件95在不受连接块71外力的作用下自动复位,当连接块71与丝杆b32配合后,锁合组件95自动复位对限位块93自动锁紧,以此类推,可防止传动组件a7在不需要使用时被电机3驱动。
66.参照图7和图8,锁合组件95包括滑块951,滑块951滑动设置于支架91的内侧,滑块951远离限位块93的一侧位于支架91的内侧固定设置有弹簧a956,滑块951底部固定设置有推板952,滑块951外侧转动设置有弹性棘爪953,且固定设置有用于限位弹性棘爪953的限位杆954,弹性棘爪953卡合设置于棘轮955的外侧,棘轮955固定设置于转轴92的一端。
67.当连接块71推动推板952时会带动滑块951在支架91的内侧滑动,此时滑块951将弹簧a956压缩,并且带动弹性棘爪953远离棘轮955解除对限位块93的锁紧,当连接块71离开推板952时,在弹簧a956的作用下使滑块951带动弹性棘爪953自动复位,当连接块71离开限位组件9时弹性棘爪953再次对棘轮955锁紧,进而使限位块93复位。
68.参照图7和图8,助推组件10包括固定座101,固定座101固定设置于升降板2的顶部,且位于丝杆b32的两端,固定座101相互靠近的一侧均固定设置有弹簧b102,弹簧b102的另一端均固定设置有推环103,弹簧b102和推环103均位于平滑段33的外侧,推环103的顶部通过连接板104固定设置有液压推杆105,液压推杆105与限位组件9中的支架91固定设置。
69.当连接块71与丝杆b32配合时,首先对助推组件10中的液压推杆105泄压,使弹簧b102通过推环103对连接块71挤压,连接块71在弹簧b102的辅助下克服限位块93的阻力向丝杆b32靠进,使丝杆b32在转动时与连接块71配合,当丝杆b32与连接块71配合后,再通过液压推杆105拉动连接板104带动推环103复位,复位状态下的弹簧b102处于压缩状态。
70.参照图1、图2和图3,遮挡板6的一侧设置有太阳能板61,太阳能板61在经过遮挡板6翻转后位于遮挡板6的底部。
71.在日常巡检过程中,通过遮挡板6外侧的太阳能板61为机器人补充电量,当需要遮挡板6对旋转探头22防护时,再将太阳能板61转动到遮挡板6的底部,对太阳能板61起到了防护效果。
72.参照图1-8,本技术实施例还公开了安防巡检装置的使用方法,包括以下步骤:
73.s1、首先将安装板1与机器人移动平台固定装配后,在移动平台的带动下使安装板1和升降板2带动旋转探头22移动巡检;
74.s2、当对旋转探头22调节高度时,电机3通过升降组件4驱动升降板2进行升降,进
而使升降板2带动旋转探头22对巡检高度进行调节,此时在限位组件9的作用下电机3无法驱动传动组件a7运行;
75.s3、当需要对旋转探头22遮挡防护时,再通过助推组件10将传动组件a7与电机3之间联动,使电机3带动传动组件a7运行,使传动组件a7带动立柱5向旋转探头22靠近;
76.s4、此时,传动组件a7通过带动传动组件b8驱动立柱5内侧的遮挡板6转动,当立柱5停止移动时,遮挡板6刚好位于旋转探头22的上方;
77.s5、此时,传动组件a7中的连接块71与丝杆b32相互脱离,在限位组件9的作用下将连接块71推到平滑段33的外侧,防止连接块71在巡检过程中自行与丝杆b32配合;
78.s6、当遮挡板6需要收起时,将助推组件10中的液压推杆105泄压,使弹簧b102通过推环103对连接块71挤压,连接块71在弹簧b102的辅助下克服限位块93的阻力向丝杆b32靠进,使丝杆b32在转动时与连接块71配合;
79.s7、此时,锁合组件95自动复位对限位块93自动锁紧。
80.综合以上,本技术实施例公开的安防巡检装置在使用时,将安装板1与机器人移动平台固定装配后,在移动平台的带动下使安装板1和升降板2带动旋转探头22移动巡检,在巡检过程中,当需要对旋转探头22的高度进行调节时,通过电机3驱动主动齿轮31转动,使主动齿轮31带动外侧啮合设置的从动齿轮41转动,从动齿轮41同步带动外侧啮合设置的齿轮a42转动,使齿轮a42带动同轴设置的蜗杆43转动。蜗杆43在转动时带动蜗轮44在升降板2的底部转动,使蜗轮44驱动内侧螺纹连接的丝杆a11上下进给,进而使丝杆a11带动安装板1移动,可对安装板1和升降板2之间的距离调节,并且在调节过程中,通过安装板1顶部的滑杆12保证了升降板2升降稳定性,此时在限位组件9的作用下电机3无法驱动传动组件a7运行。
81.当需要对旋转探头22遮挡时,首先将位于丝杆b32一端的液压推杆105泄压,使弹簧b102通过推环103对连接块71挤压,连接块71在弹簧b102的辅助下克服限位块93的阻力向丝杆b32靠进,使丝杆b32在转动时与连接块71配合,当丝杆b32与连接块71配合后,再通过液压推杆105拉动连接板104带动推环103复位,复位状态下的弹簧b102处于压缩状态,使连接块71在丝杆b32的驱动下移动,连接块71通过连接轴72带动齿轮b73在齿板74的顶部滚动,当齿轮b73滚动时带动立柱5在滑轨75的顶部滑动,进而使立柱5带动遮挡板6向旋转探头22靠近,同时当齿轮b73转动时会带动链轮a81转动,链轮a81通过链条83驱动链轮b82转动,使链轮b82带动遮挡板6在立柱5之间转动,进而使传动组件a7同步带动遮挡板6翻转,立柱5停止移动时,遮挡板6刚好位于旋转探头22的上方,对旋转探头22起到了防护的效果。
82.此时连接块71移动到丝杆b32另一端的平滑段33外侧,具体的,当连接块71移动到平滑段33外侧时,连接块71会推动推板952带动滑块951在支架91的内侧滑动,此时滑块951将弹簧a956压缩,并且带动弹性棘爪953远离棘轮955解除对限位块93的锁紧,此时限位块93在扭簧94的作用下向连接块71的外侧压紧,随着连接块71与丝杆b32相互脱离,在限位块93的作用下将连接块71推到平滑段33的外侧,防止连接块71在巡检过程中自行与丝杆b32配合。
83.当遮挡板6需要收起时,同样通过将助推组件10中的液压推杆105泄压,使弹簧b102通过推环103对连接块71挤压,连接块71在弹簧b102的辅助下克服限位块93的阻力向丝杆b32靠进,使丝杆b32在转动时与连接块71配合,当连接块71离开推板952时,在弹簧
a956的作用下使滑块951带动弹性棘爪953自动复位,当连接块71离开限位组件9时弹性棘爪953再次对棘轮955锁紧,进而使限位块93复位,以此类推,可在不妨碍电机3驱动升降板2升降的基础上选择性通过电机3驱动遮挡板6对旋转探头22防护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1