磁悬浮混合式三自由度轴承、空压机的制作方法
1.本发明属于磁悬浮轴承技术领域,具体涉及一种磁悬浮混合式三自由度轴承、空压机。
背景技术:
2.工业空压机转速较高,气动部件尺寸大,为保证转子处于刚体状态稳定运行,应尽可能减小转子长度。基于前述目的,现有技术中出现了磁悬浮混合式三自由度轴承,其将轴向磁轴承与径向磁轴承集成为一体,以能够实现对转子的轴向与径向位置的调整。具体例如专利公开号为cn108869545a发明专利申请,其具有径向磁轴承组件以及连接于其一端的轴向磁轴承,两个磁轴承之间夹设有永磁体,永磁体为径向磁轴承组件及轴向磁轴承组件提供偏置磁场,而由于永磁体处于轴向磁轴承组件具有的轴向定子的一侧,具体的如该专利申请中,其永磁体设置于轴向定子中右轴向定子的一侧,此时流经右轴向定子的偏置磁场的流通路径长度短于左轴向定子的偏置磁场的流通路径长度,同时左轴向定子与右轴向定子的结构左右对称,由于电磁特性左右不对称,因此,最终导致轴向磁轴承的左轴向定子与右轴向定子的轴向力出力不相等,为保证出力小的方向也可满足轴向负载需求,目前通常的解决方式是增大轴承整体尺寸,这增大了磁轴承体积,不利于转子动力学特性。
技术实现要素:
3.因此,本发明提供一种磁悬浮混合式三自由度轴承、空压机,能够解决现有技术中磁悬浮混合式三自由度轴承中左右轴向定子结构对称但永磁偏置磁路流通路径长度不相等,导致左右轴向定子轴向出力不相等,而为了保证出力小的方向也可满足轴向负载需求,导致磁轴承体积增大,不利于转子动力学特性的技术问题。
4.为了解决上述问题,本发明提供一种磁悬浮混合式三自由度轴承,包括径向磁轴承组件以及处于所述径向磁轴承组件一端的轴向磁轴承组件,所述径向磁轴承组件与所述轴向磁轴承组件之间夹持有能够提供偏置磁场的永磁体,所述轴向磁轴承组件包括第一轴向定子铁心与第二轴向定子铁心,其中,所述第二轴向定子铁心处于所述永磁体与所述第一轴向定子铁心之间,所述第一轴向定子铁心具有第一磁环,所述第一磁环的径向厚度为la,所述第二轴向定子铁心具有第二磁环,所述第二磁环的径向厚度为le,la<le。
5.在一些实施方式中,0.8≤la/le<1。
6.在一些实施方式中,所述第一轴向定子铁心包括第一定子主体,所述第一定子主体的轴向厚度为lb,所述第二轴向定子铁心包括第二定子主体,所述第二定子主体的轴向厚度为ld,lb<ld。
7.在一些实施方式中,0.7≤lb/ld≤0.95。
8.在一些实施方式中,所述轴向磁轴承组件还包括处于所述第一轴向定子铁心与所述第二轴向定子铁心之间的推力盘,所述推力盘的轴向厚度为lp,lp>la、lp>le。
9.在一些实施方式中,lp≤la+le。
10.在一些实施方式中,lp/(la+le)≥0.7。
11.在一些实施方式中,所述径向磁轴承组件包括径向定子铁心,所述径向定子铁心的轴向厚度为lr,lr>lp。
12.在一些实施方式中,lr≤2lp。
13.在一些实施方式中,1<lr/lp≤1.8。
14.本发明还提供一种空压机,包括上述的磁悬浮混合式三自由度轴承。
15.在一些实施方式中,空压机还包括驱动电机,所述驱动电机包括驱动电机绕组,所述驱动电机绕组处于所述径向磁轴承组件远离所述轴向磁轴承组件的一端,且所述径向磁轴承组件具有的径向定子铁心为叠片结构。
16.在一些实施方式中,空压机还包括空压机转轴,所述空压机转轴上套装有叶轮,所述叶轮运转过程中施加于所述空压机转轴的轴向气动负载的方向为由所述轴向磁轴承组件朝向所述径向磁轴承组件的一侧。
17.本发明提供的一种磁悬浮混合式三自由度轴承、空压机,通过将轴向出力较小侧的径向厚度也即第二磁环的径向厚度增加,从而提高了第二轴向定子铁心的轴向出力,使第一轴向定子铁心与第二轴向定子铁心的结构非对称,实现在不增加轴承整体体积的情况下进行轴向力平衡设计,满足轴向负载需求,进而利于提升转子动力学特性。
附图说明
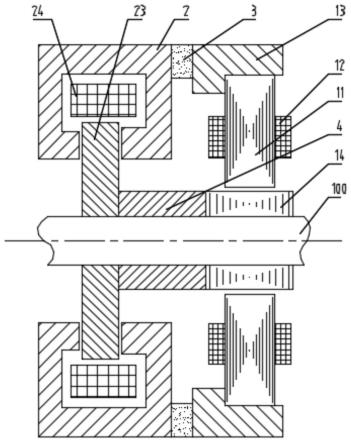
18.图1为本发明实施例的磁悬浮混合式三自由度轴承的内部结构示意图(轴向断面);
19.图2为图1的左侧视图;
20.图3为本发明实施例的磁悬浮混合式三自由度轴承的永磁偏置磁路、径向控制磁路以及轴向控制磁路的示意图。
21.附图标记表示为:
22.1、径向磁轴承组件;11、径向定子铁心;12、径向控制绕组;13、安装环;14、径向转子铁心;2、轴向磁轴承组件;211、第一磁环;212、第一定子主体;221、第二磁环;222、第二定子主体;23、推力盘;24、轴向控制绕组;25、中间导磁环;3、永磁体;4、套环;100、空压机转轴。
具体实施方式
23.结合参见图1至图3所示,提供一种磁悬浮混合式三自由度轴承,包括径向磁轴承组件1以及处于径向磁轴承组件1一端的轴向磁轴承组件2,径向磁轴承组件1与轴向磁轴承组件2之间夹持有能够提供偏置磁场的永磁体3,该永磁体3采用轴向充磁(也即图1方位的水平方向),永磁体3为整环形或覆盖超过圆周方向300
°
的分块扇形磁钢组,轴向磁轴承组件2包括轴向定子铁心,轴向定子铁心包括第一轴向定子铁心(也即图1所示方位下的左轴向定子铁心)、第二轴向定子铁心(也即图1所示方位下的右轴向定子铁心)以及处于两者之间的中间导磁环25,其中,第二轴向定子铁心处于永磁体3与第一轴向定子铁心之间,第一轴向定子铁心具有第一轴向定子铁心包括第一定子主体212以及其上的第一磁环211,第一磁环211的径向厚度为la,第二轴向定子铁心具有第二定子主体222以及其上的第二磁环
221,第二磁环221的径向厚度为le,la<le。该技术方案中,通过将轴向出力较小侧的径向厚度也即第二磁环221的径向厚度增加,从而提高了第二轴向定子铁心的轴向出力,使第一轴向定子铁心与第二轴向定子铁心的结构非对称,实现在不增加轴承整体体积的情况下进行轴向力平衡设计,满足轴向负载需求,进而利于提升转子动力学特性。
24.参见图1所示,轴向磁轴承组件2还包括处于第一轴向定子铁心与第二轴向定子铁心之间的推力盘23,第一轴向定子铁心与推力盘23之间形成轴向间隙一,第二轴向定子铁心与推力盘23之间形成轴向间隙二。
25.进一步参见图1所示,径向定子铁心11的外圆周侧套装有安装环13,永磁体3被夹持于该安装环13的端面与第二定子主体222之间,在一个具体的实施例中,该安装环13朝向第二定子主体222的端面上构造有相应的安装槽,能够对永磁体3形成可靠定位。
26.径向磁轴承组件1还包括径向转子铁心14,其套装于转轴(具体例如为空压机转轴100)上,其也可以为与转轴一体成型的结构,优先的其为叠片结构。转轴上还具有套环4,套环4优选为实心结构,其被推力盘23与径向转子铁心14之间实现两者的轴向位置确定以及轴向导磁。套环4可以为与转轴一体化成型的结构,亦可以是组装结构。能够理解的是,第一轴向定子铁心与第二轴向定子铁心之间形成的环槽内绕设有单线圈模式的轴向控制绕组24。
27.参见图2所示,其中的径向定子铁心11具有四个极柱,每个极柱上则绕设有一个径向控制绕组12,以能够对四个极柱分别所在的象限的径向力大小进行控制调整。
28.具体而言,如图3所示,p1为永磁偏置磁路,p2为轴向控制磁路,p3为径向控制磁路,永磁偏置磁路p1方向不变,轴向控制磁路p2、径向控制磁路p3可通过改变绕组电流方向而改变,进而改变径向气隙、轴向气隙中磁通大小,进而调整出力方向。为了便于描述,将轴向定子铁心划分为8a、8b、8c、8d、8e五部分,具体可组合成两个零件,如8a、8b、8c组成的轴向定子铁心一和8d、8e组成的轴向定子铁心二,或8a、8b组成的轴向定子铁心一和8c、8d、8e组成的轴向定子铁心二等组合方式,能够理解的是,其中的8a对应于上文中的第一磁环211部分,8b对应于第一定子主体212,8c对应于上文的中间导磁环25,8d对应于第二定子主体222,8e则对应于第二磁环221,8a与推力盘23之间形成轴向气隙一,8e与推力盘23之间形成轴向气隙二。
29.以图3磁路方向为例,对磁路进行分析。忽略漏磁,轴向方向上磁通主要有以下几种路径:
30.①
永磁体3-8c-8b-8a-轴向气隙一-推力盘23-套环4-径向转子铁心14-径向气隙-径向定子铁心11-永磁体3;
31.②
永磁体3-8d-8e-轴向气隙二-推力盘23-套环4-径向转子铁心14-径向气隙-径向定子铁心11-永磁体3;
32.③
8a-轴向气隙一-推力盘23-轴向气隙二-8e-8d-8c-8b-8a;
33.④
8a-8b-8c-8d-8e-轴向气隙二-推力盘23-轴向气隙一-8a。
34.在无控制电流时,磁路为路径
①②
的结合,根据磁阻公式r为磁阻,l为磁路长度,a为磁路面积,μ为磁导率,8a的宽度la(也即上文的第一磁环211的径向厚度)与8e的宽度le(也即上文的第二磁环221的径向厚度为le)相等、8b的宽度lb(也即第一定子主体
212的轴向厚度)与8d的宽度ld(也即第二定子主体222的轴向厚度)相等时,由于路径
①
中8a、8b、8c磁路长度更长,路径
①
磁阻rt1和路径
②
磁阻rt2存在rt1》rt2,进而路径
①
轴向气隙一磁通φ01和路径
②
轴向气隙二磁通φ02存在φ01《φ02,推力盘磁通φp=φ01+φ02。
35.通入控制电流i正值,当电流i较小时,磁路为路径
①②
的结合,φp=φ01+φ02,且随着i增大,路径
①
分量增加,路径
②
分量减少;在第二轴向定子铁心中刚好抵消永磁偏置时,磁路仅表现为
①
,φp=φ01;继续增加i,将表现为路径
①③
的结合,且i越大,路径
③
分量越大,φp=φ01-φ02。
36.当通入控制电流-i时,电励磁在第一轴向定子铁心与永磁偏置方向相反,在第二轴向定子铁心与永磁偏置方向相同。当电流-i较小时,磁路为路径
①②
的结合,φp=φ01+φ02,且随着i增大,路径
①
分量减少,路径
②
分量增加;在第一轴向定子铁心中刚好抵消永磁偏置时,磁路仅表现为
②
,φp=φ02;继续增加i,将表现为路径
②④
的结合,且i越大,路径
④
分量越大,φp=φ02-φ01。
37.根据磁密定义其中b为磁密,φ为磁通,a为磁路面积,由于无控制电流的初始状态下φ01《φ02,故而为抵消永磁偏置,通入的正向电流需大于反向电流,即不同方向相同大小的电流下,第二轴向定子铁心磁密更高。因此,在控制电流i时的铁心磁阻rt1、rt2与控制电流-i时的铁心磁阻r't1、r't2满足:rt1《r't2,rt2》r't1。进而,在控制电流i时的气隙磁通φ01、φ02与控制电流-i时的气隙磁通φ'01、φ'02满足:φ01》φ'02,φ02《φ'01。因此,图3中向左的最大承载力会大于向右的最大承载力。因此为平衡轴向承载力大小,需减小磁路
②
磁阻,即增加磁路
②
的磁路面积,要求la<le,lb<ld。la、le直接决定了气隙面积,同时对铁心磁阻产生影响,进而影响轴承出力。随着le增大,8e部分磁密减小,磁阻减小,φ02增大,轴承向右出力增加,向左出力不变。但同时,φ02增大使8d部分磁密增加、磁阻增加,当8e增至一定大小后,8d部分磁阻明显增加,进而导致轴向出力增速减缓,8e继续增加则可能因8d部分磁密过高而导致轴承出力反而减小。因此,le适当增加可平衡轴向承载力大小,但过大易导致轴承出力反而减小,优选0.8≤la/le<1。一定范围内增加ld可以降低第二轴向定子铁心8d部分磁密,进而提高后向承载力,在ld增至一定大小后,8d磁密减小,铁心磁阻明显下降,对出力影响很小,故而综合考虑承载力与体积,第二轴向定子铁心厚度存在最优值,优选lb/ld=0.7~0.95。
38.根据前述磁路分析,由于通过轴向定子铁心一和轴向定子铁心二的轴向偏置磁路p1均会经过推力盘23,因此要求推力盘23磁路面积较铁心磁路面积大,即推力盘23的轴向厚度lp满足lp>la、lp>le。根据通入控制电流大小的不同,推力盘磁通φp取值分为φp=φ01+φ02、φp=φ01、φp=φ02、φp=φ01-φ02、φp=φ01-φ02几种情况,因此lp≤la+le即可,同时为保证推力盘不发生磁饱和,lp取值不宜过小,优选lp/(la+le)≥0.7。
39.经过推力盘23的轴向偏置磁路p1均会经过径向定子铁心11且径向定子铁心11还通过径向控制磁路p3,故径向定子铁心11的轴向厚度lr满足lr≥lp。在最大径向控制电流下,径向偏置磁场与径向控制磁场相抵消,通过径向定子铁心11的磁通φr不超过两倍的偏置磁通,因此lr≤2lp。由于径向定子铁心11一般采用硅钢片叠片结构,较推力盘等合金材料导磁性更优,故综合考虑轴承体积,径向定子铁心11厚度可适当减小,优选1<lr/lp≤1.8。
40.根据本发明实施例,还提供一种空压机,尤其是一种工业用空压机,包括上述的磁悬浮混合式三自由度轴承。进一步的,空压机还包括驱动电机,驱动电机包括驱动电机绕组,驱动电机绕组处于径向磁轴承组件1远离轴向磁轴承组件2的一端,且径向磁轴承组件1具有的径向定子铁心11为叠片结构,减少电机绕组端部线包在实心铁心中产生的涡流发热,提高磁轴承运行的可靠性。
41.在一些实施方式中,空压机还包括空压机转轴100,空压机转轴100上套装有叶轮,叶轮运转过程中施加于空压机转轴100的轴向气动负载的方向为由轴向磁轴承组件2朝向径向磁轴承组件1的一侧,将空压机轴向气动负载与轴向磁轴承组件的轴向承载力的结合,实现空压机转轴100的轴向力综合设计。
42.需要说明的是,前文中的左右方位皆以图1所示的方位为参考。
43.本领域的技术人员容易理解的是,在不冲突的前提下,上述各方式的有利技术特征可以自由地组合、叠加。
44.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1