一种洛伦兹力磁悬浮万向稳定平台
1.本发明涉及一种洛伦兹力磁悬浮万向稳定平台,基于直线、正交和旋转洛伦兹力磁轴承,构建三体、七自由度、全通道洛伦兹力磁悬浮平台,实现载荷超精指向、超稳控制和超敏机动,为高品质航天器遂行多载荷瞄准、指向、跟踪任务提供一种全新的技术途径,在空间激光通信、天文观测、高分侦察等领域具有广泛的应用前景。
技术背景
2.空间激光通信等航天任务对航天器平台的指向精度、稳定性及敏捷性都提出了极高的要求,星上传统机械式双轴转台存在的振动干扰问题,以及现有磁悬浮卫星存在的载荷姿态运动与平台姿态运动相互制约的问题,因此亟需发展具有超精、超稳、超敏性能的高品质航天器平台,为复杂航天任务提供技术支撑。
3.基于磁悬浮技术体现出的优越性,国内相关学者提出了若干磁悬浮平台解决方案。授权专利zl201210321861.0所述的一种五自由度主动磁悬浮惯性稳定平台具备两自由度平动、三自由度转动,但其功能限于隔离平台振动对载荷的影响。授权专利zl202010295521.x所述的一种洛伦兹惯性稳定平台采用球面洛伦兹力磁轴承实现偏转,但其平台本体并依然采用机械刚性支撑。同时,上述两款磁悬浮稳定平台方案均面向机载、车载或舰载平台的振动抑制和伺服跟踪,难以适应微重力的空间环境。授权专利zl201410610456.x所述的一种双超卫星平台,采用非接触磁浮机构实现振源与载荷的动静空间隔离,消除平台微振动对载荷的干扰,实现了卫星“超精超稳”控制,但平台和载荷无法相对转动,难以满足高动态航天任务对平台超敏捷性能的迫切需求。
技术实现要素:
4.针对现有技术中的缺陷:本发明的目的是提供了一种高精度高动态洛伦兹力磁悬浮万向稳定平台,能够有效降低载荷在太空飞行时的内外扰动,实现卫星载荷的超精指向、超稳控制和超敏机动。
5.本发明的技术解决方案是:一种洛伦兹力万向稳定平台,主要包括:平台舱体、框架舱体、载荷舱体、一对直线洛伦兹力磁轴承、一对正交洛伦兹力磁轴承、一对一级旋转洛伦兹力磁轴承和一对二级旋转洛伦兹力磁轴承;平台舱体通过一级旋转洛伦兹力磁轴承驱动框架舱体绕基座主对称轴方向旋转机动,直线洛伦兹力磁轴承控制载荷舱一自由度稳定悬浮,正交洛伦兹力磁轴承控制载荷舱体四自由度稳定悬浮,二级旋转洛伦兹力磁轴承控制载荷舱体一自由度稳定悬浮;在实现载荷舱体六自由度稳定悬浮基础上,框架舱体内的一级旋转洛伦兹力磁轴承控制平台一自由度的偏转;最终实现载荷舱上载荷的七自由度悬浮稳定,同时也保证载荷与平台之间的物理隔离。
6.上述方案的原理是:通过安培定理建立洛伦兹力负载模型,采用洛伦兹力磁轴承提供磁力,实现无接触稳定支撑,具有无摩擦、主动抑振、长寿命、动态性能好、控制精度高的优点,能够快速实现稳定悬浮,满足平台对超高姿态稳定度、超高指向精度和超快姿态敏
捷性的需求
7.本发明与现有技术相比的优点在于:首次提出一种七自由度旋转洛伦兹力磁轴承新机构,通过双环状、共转轴径向充磁磁钢创设高均匀性磁场,大幅提升磁密线性度,通过矩形闭环绕组切割磁力线,驱动旋转洛伦兹磁轴承定、转子相对大角度、高精度、高动态往复运动。通过四个旋转洛伦兹力磁轴承成对工作、两两正交驱动载荷舱二维万向旋转,实现载荷2π空间超敏捷机动。
附图说明
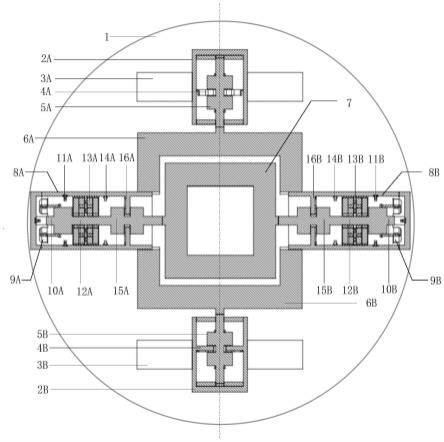
8.图1为本发明技术解决方案的一种洛伦兹力磁悬浮万向稳定平台俯视截面图;
9.图2a为本发明技术解决方案的一种洛伦兹力磁悬浮万向稳定平台的一级旋转洛伦兹力磁轴承结构示意图;
10.图2b为本发明技术解决方案的一种洛伦兹力磁悬浮万向稳定平台的一级旋转洛伦兹力磁轴承结构示意图;
11.图3为本发明技术解决方案的一种洛伦兹力磁悬浮万向稳定平台的直线洛伦兹力磁轴承三维结构示意图;
12.图4a为本发明技术解决方案的一种洛伦兹力磁悬浮万向稳定平台的正交洛伦兹力磁轴承三维结构示意图;
13.图4b为本发明技术解决方案的一种洛伦兹力磁悬浮万向稳定平台的正交洛伦兹力磁轴承主磁路图受力分析示意图;
14.图4c为本发明技术解决方案的一种洛伦兹力磁悬浮万向稳定平台的正交洛伦兹力磁轴承瓦形线圈示意图;
15.图5a为本发明技术解决方案的一种洛伦兹力磁悬浮万向稳定平台的二级旋转洛伦兹力磁轴承三维示意图;
16.图5b为本发明技术解决方案的一种洛伦兹力磁悬浮万向稳定平台的二级旋转洛伦兹力磁轴承主磁路受力分析示意图;
具体实施方案
17.下面将对本发明实施例作进一步地详细描述。本发明实施例中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
18.具体实施例:
19.如图1所示,一种洛伦兹力磁悬浮万向稳定平台,主要由平台舱体、框架舱体、载荷舱体三部分组成,其特征在于,平台舱体主要包括:基座1、上框架舱伺服组件2a、上框架舱支架3a、一级上旋转洛伦兹力磁轴承定子组件4a、下框架舱伺服组件2b、一级下旋转洛伦兹力磁轴承定子组件4b和下框架舱支架3b;框架舱体主要包括:一级上旋转洛伦兹力磁轴承转子组件5a、上框体6a、左载荷舱伺服组件8a、左直线洛伦兹力磁轴承定子组件9a、左平动传感器11a、左正交洛伦兹力磁轴承定子组件13a、左转动传感器14a、二级左旋转洛伦兹力磁轴承定子组件16a、下框体6b、二级右旋转洛伦兹力磁轴承定子组件16b、右转动传感器14b、右正交洛伦兹力磁轴承定子组件13b、右平动传感器11b、右直线洛伦兹力磁轴承定子组件9b、右载荷舱伺服组件8b;载荷舱体主要包括:左直线洛伦兹力磁轴承转子组件10a、左
正交洛伦兹力磁轴承转子组件12a、二级左旋转洛伦兹力磁轴承转子组件15a、载荷承接件7、二级右旋转洛伦兹力磁轴承转子组件15b、右正交洛伦兹力磁轴承转子组件12b、右直线洛伦兹力磁轴承转子组件10b;上框架舱支架3a和下框架舱支架3b位于基座1主对称轴沿线两端,上框架舱支架3a底部通过螺钉与基座1固连、上端用螺钉与上框架舱伺服组件2a固连,上框架舱伺服组件2a通过机械轴承与框架舱体旋转轴链接,一级上旋转洛伦兹力磁轴承定子组件4a位于上框架伺服组件2a径向内侧并与其固连;同理,下框架舱支架3b底部用螺钉与基座1固连,上端通过螺钉与下框架舱伺服组件2b固连,下框架舱伺服组件2b通过机械轴承与框架舱体下旋转轴链接,一级下旋转洛伦兹力磁轴承定子组件4b位于下框架舱伺服组件2b径向内侧并与其通过螺钉固连;一级上旋转洛伦兹力磁轴承转子组件5a位于上框架舱伺服组件2a内且沿基座1主对称轴方向通过螺钉与上框体6a旋转轴固连,上框体6a左右凸缘下端通过螺钉分别与左载荷舱伺服组件8a、右载荷舱伺服组件8b固连,左直线洛伦兹力磁轴承定子组件9a位于左载荷舱伺服组件8a内侧左端并与其固连,左正交洛伦兹力磁轴承定子组件13a位于左直线洛伦兹力磁轴承定子组件16a轴向右侧并与左载荷舱伺服组件8a固连,左二级旋转洛伦兹力磁轴承定子组件16a位于左正交洛伦兹力磁轴承定子组件13a轴向右侧并与左载荷舱伺服组件8a固连,左平动传感器11a位于左直线洛伦兹力磁轴承定子组件9a和左正交洛伦兹力磁轴承定子组件13a之间固连于左载荷舱伺服组件8a上,左转动传感器14a位于左正交洛伦兹力磁轴承定子组件13a和左二级旋转洛伦兹力磁轴承定子组件16a之间且固定在左载荷舱伺服组件8a上,下框体6b左右凸缘上端通过螺钉分别与左载荷舱伺服机构8a、右载荷舱伺服组件8b固连,右直线洛伦兹力磁轴承定子组件9b位于右载荷舱伺服组件8b内侧最右端,右正交洛伦兹力磁轴承定子组件13b位于右直线洛伦兹力磁轴承定子组件9b左侧,二级右旋转洛伦兹力磁轴承定子组件16b位于右正交洛伦兹力磁轴承定子组件13b左侧,右平动传感器11b位于右直线洛伦兹力磁轴承定子组件9b和右正交洛伦兹力磁轴承定子组件13b之间固连于右载荷舱伺服组件8b上,右转动传感器14b位于右正交洛伦兹力磁轴承定子组件13b和右二级旋转洛伦兹力磁轴承定子组件16b之间且均连在右载荷舱伺服组件8b上;左直线洛伦兹力磁轴承转子组件10a位于左载荷舱伺服组件8a内侧最左端,左正交洛伦兹力磁轴承转子组件12a位于左直线洛伦兹力磁轴承转子组件12a右侧,左二级旋转洛伦兹力磁轴承转子组件15a位于左正交洛伦兹力磁轴承转子组件12a右侧,左直线洛伦兹力磁轴承转子组件10a、左正交洛伦兹力磁轴承转子组件12a和二级左旋转洛伦兹力磁轴承转子组件15a三者采用同轴方式与载荷承接件7固连;同理,右直线洛伦兹力磁轴承转子组件10b位于右载荷舱伺服组件8b内侧最右端,右正交洛伦兹力磁轴承转子组件12b位于右直线洛伦兹力磁轴承转子组件12b左侧,右二级旋转洛伦兹力磁轴承转子组件15b位于右正交洛伦兹力磁轴承转子组件12b左侧;平台舱体通过一级旋转洛伦兹力磁轴承驱动框架舱体和载荷舱体整体沿框架舱体旋转轴一自由度旋转,直线洛伦兹力磁轴承为载荷舱体提供轴向一自由度平动悬浮,正交洛伦兹力磁轴承为载荷舱体提供径向两自由度平动悬浮和两自由度偏转悬浮,框架舱体通过二级旋转洛伦兹力磁轴承驱动载荷舱体沿其旋转轴一自由度转动,载荷舱体旋转轴和框架舱体旋转轴呈正交关系,平台舱体和框架舱体协同工作,操纵载荷舱体五自由度洛伦兹力稳定悬浮和二自由度洛伦兹力快速旋转,实现卫星载荷的超精指向、超稳控制和超敏机动。
20.图2a为本发明中框架舱体上一级旋转洛伦兹力磁轴承结构示意图,图2b为本发明
中框架舱体上的一级旋转洛伦兹力磁轴承剖面结构示意图,框架舱体上一级旋转洛伦兹力磁轴承的外磁钢环301置于线圈支架306外侧,内磁钢环303置于线圈内侧;内磁钢环303、外磁钢环301径向充磁,且两者充磁方向相同;线圈302缠绕于线圈支架306上,线圈302之间固定于双框架浮子903的一个旋转轴上;高精度码盘304用于检测框架舱体相对于平台舱体的旋转大小。
21.图3为本发明中载荷舱体上二级旋转洛伦兹力磁轴承结构示意图,二级旋转洛伦兹力磁轴承采用内外磁钢的方式,外磁钢环801置于线圈支架803外侧,内磁钢环802置于线圈支架804内侧;内磁钢环802、外磁钢环803径向充磁,且内磁钢环802和外磁钢环801充磁方向相同;线圈803固定于线圈支架804上,垂直放置于外磁钢801与内磁钢环802之间;线圈803通电后,垂直于线圈803的均匀磁场中产生一对同向力,控制载荷舱体稳定悬浮。
22.图4a为本发明中载荷舱体上正交洛伦兹力磁轴承结构三维示意图;旋转洛伦兹力磁轴承主要包括:磁轴承外转子套环901a、磁轴承线圈支架902和磁轴承内转子套环901b,上述三者与导磁环903同轴固连;图4b为本发明中载荷舱体上正交洛伦兹力磁轴承磁路仿真图,正交洛伦兹力磁轴承采用径向充磁方式,外侧充磁方向依次为:上n下s、上n下s、上n下s和上n下s;内侧充磁方向依次为:上s下n、上n下s、上n下s和上n下s,内侧与外侧在磁场中产生同向力;图4c为本发明中载荷舱体上正交洛伦兹力磁轴承结构内部瓦形线圈示意图;其线圈支架上的左瓦形线圈905a、上瓦形线圈905b、下瓦形线圈905c和右瓦形线圈905d依次呈90
°
排列分布,采用瓦形排列方式有利于增大在磁场中线圈受力。
23.图5a为本发明中载荷舱体上二级旋转洛伦兹力磁轴承结构示意图,二级旋转洛伦兹力磁轴承机构包含:径向上充磁磁钢1004a和径向下充磁磁钢1004b,上下磁钢采用共转轴方式获得高均匀性磁场,提升磁密线性度;图5b为本发明中载荷舱体上二级旋转洛伦兹力磁轴承主磁路图受力分析示意图;外磁钢依次为:上s下n,上s下n;内磁钢为上s下n,上s下n;磁感线由外磁钢指向内磁钢形成封闭曲线,线圈沿径向在通电时产生力偶矩。
24.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1