一种飞机传动线系上使用的差速装置及飞机传动线系的制作方法
1.本发明属于飞机传动技术领域,尤其涉及一种飞机传动线系上使用的差速装置及飞机传动线系。
背景技术:
2.行星齿轮差速机构是一种能够实现3自由度切换的行星齿轮结构,起到在不同输入转速下得到不同输出转速的作用,广泛用于多自由频繁切换的场合。
3.相关技术中,行星齿轮差速机构多用于汽车等工程机械,也用于飞机的动力驱动装置上,使用的行星齿轮差速机构多为ww型行星差速机构、nn型行星差速机构或锥齿轮差速机构,然而,在飞机的传动线系上缺少能够实现差速功能的行星齿轮差速机构。
4.假如将ww型行星差速机构、nn型行星差速机构或锥齿轮差速机构用在飞机的传动线系上,ww、nn型行星差速机构结构复杂,行星轮数量多,不易于结构减重;锥齿轮差速机构安装调试环节复杂繁琐,锥直齿加工成本高,整体经济性差。
技术实现要素:
5.为了解决相关技术中行星差速机构结构复杂,行星轮数量多,不易于结构减重,安装调试环节复杂繁琐,加工成本高,本发明提供一种飞机传动线系上使用的差速装置及飞机传动线系,所述技术方案如下:
6.第一方面,提供一种飞机传动线系上使用的差速装置,包括:行星差速机构、第一直齿齿轮副、第二直齿齿轮副,行星差速机构分别与第一直齿齿轮副、第二直齿齿轮副连接,所述装置的两个输入接口分别与线系动力源与备份动力源连接,输出接口与输出端连接,
7.第一直齿齿轮副用于调整整个传动线系的传动比;第二直齿齿轮副用于调整传动线系的极性及备份动力源轴线与传动线系的距离;
8.第一直齿齿轮副、第二直齿齿轮副在行星差速机构的控制作用下实现飞机传动线系的多种传动模式。
9.其中,多种传动模式包括传动线系的前段和后段同步运动,前段运动且后段静止,以及后段运动且前段静止。
10.其中,行星差速机构包括:中心轮、行星架和活动齿圈,
11.中心轮与行星架为行星差速机构的输入端,活动齿圈为行星差速机构的输出端;中心轮与备份动力源连接,行星架通过第一直齿齿轮副与线系动力源连接,活动齿圈与第二直齿齿轮副连接。
12.其中,第一直齿齿轮副包括:第一输入轮和第一输出轮,
13.输入轮与线系动力源连接,输出轮分别与输入轮、行星架连接。
14.其中,第二直齿齿轮副包括:第二输出轮和第二输入轮,
15.第二输出轮与输出端连接,第二输入轮分别与第二输出轮、活动齿圈连接。
16.其中,传动模式为传动线系的前段和后段同步运动,
17.传动线系的速度与扭矩从线系动力源进入,经过第一直齿齿轮副的减速后进入行星差速机构中,经过行星差速机构的加速后进入第二直齿齿轮副,最终到达输出端。
18.其中,传动模式为前段运动且后段静止,
19.传动线系的速度与扭矩从线系动力源进入,经过第一直齿齿轮副的减速后进入行星差速机构中,经过行星差速机构的加速后,最终到达备份动力源。
20.其中,传动模式为后段运动且前段静止,
21.传动线系的速度与扭矩从备份动力源进入,经过行星差速机构,减速后进入第二直齿齿轮副,最终到达输出端。
22.第二方面,提供一种飞机传动线系,包括:飞机传动线系上使用的差速装置、线系动力源、备份动力源和输出端,所述差速装置分别与线系动力源、备份动力源、输出端连接;
23.飞机传动线系上使用的差速装置包括第一方面任一所述的装置。
24.本发明提供一种ngw型行星差速机构,该行星齿轮差速机构应用于飞行传动线系。与ww、nn型行星差速机构相比,本发明的ngw型行星差速机构的结构简单,行星轮数量少,易于结构减重。与锥齿轮差速机构相比,安装调试环节简单,锥直齿加工成本更低,整体经济性更优。本发明的ngw型行星差速机构具有结构紧凑、加工装配工艺性更优、重量轻的优点。
附图说明
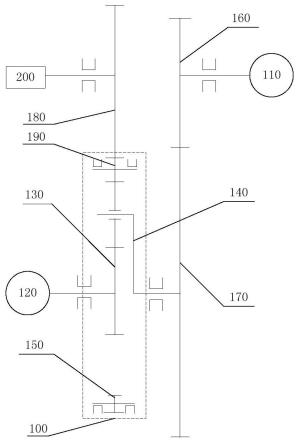
25.图1为本发明实施例的飞机传动线系上使用的差速装置结构图;
26.图2为本发明实施例的飞机传动线系结构图。
具体实施方式
27.下面结合附图和具体实施例对本发明进行详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
28.本发明提供一种飞机传动线系上使用的差速装置,如图1所示,包括:行星差速机构100、第一直齿齿轮副、第二直齿齿轮副,行星差速机构100分别与第一直齿齿轮副、第二直齿齿轮副连接,所述装置的两个输入接口分别与线系动力源110与备份动力源120连接,输出接口与输出端200连接,
29.第一直齿齿轮副用于调整整个传动线系的传动比;第二直齿齿轮副用于调整传动线系的极性及备份动力源轴线与传动线系的距离;
30.第一直齿齿轮副、第二直齿齿轮副在行星差速机构100的控制作用下实现飞机传动线系的多种传动模式。
31.本发明另一实施例还提供一种飞机传动线系上使用的差速装置,如图1所示,包括:行星差速机构100、第一直齿齿轮副、第二直齿齿轮副,行星差速机构100分别与第一直齿齿轮副、第二直齿齿轮副连接,所述装置的两个输入接口分别与线系动力源110与备份动力源120连接,输出接口与输出端200连接,
32.其中,行星差速机构100包括:中心轮130、行星架140和活动齿圈150,
33.中心轮130与行星架140为行星差速机构的输入端,活动齿圈150为行星差速机构的输出端;中心轮130与备份动力源120连接,行星架140通过第一直齿齿轮副与线系动力源110连接,活动齿圈150与第二直齿齿轮副连接。
34.第一直齿齿轮副包括:第一输入轮160和第一输出轮170,
35.输入轮160与线系动力源110连接,输出轮170分别与输入轮160、行星架140连接。
36.第二直齿齿轮副包括:第二输出轮180和第二输入轮190,
37.第二输出轮180与输出端200连接,第二输入轮190分别与第二输出轮180、活动齿圈150连接。
38.本发明中,多种传动模式可包括传动线系的前段和后段同步运动,前段运动且后段静止,以及后段运动且前段静止。
39.第一方面,当传动模式为传动线系的前段和后段同步运动时,传动线系的速度与扭矩从线系动力源110进入,经过第一直齿齿轮副的减速后进入行星差速机构100中,经过行星差速机构100的加速后进入第二直齿齿轮副,最终到达输出端200。
40.在这种传动模式下,备份动力源120停止时,传动线系由线系动力源110输入,经过第一直齿齿轮副的第一输入轮160和第一输出轮170,行星差速机构的行星架140与活动齿圈150,最终输出到传动线系的输出端200。此模式下,传动线系的输入、输出端同步传动。
41.第二方面,当传动模式为前段运动且后段静止时,传动线系的速度与扭矩从线系动力源110进入,经过第一直齿齿轮副的减速后进入行星差速机构100中,经过行星差速机构100的加速后,最终到达备份动力源120。
42.在该传动模式下,备份动力源120随线系动力源110的输入而运动,传动线系由线系动力源110输入,经过第一直齿齿轮副的第一输入轮160和第一输出轮170,行星差速机构的行星架140与中心轮130,最终输出到备份动力源120。此模式下,传动线系的输出端200停止。
43.第三方面,当传动模式为后段运动且前段静止时,传动线系的速度与扭矩从备份动力源120进入,经过行星差速机构100,减速后进入第二直齿齿轮副,最终到达输出端200。
44.在该传动模式下,备份动力源120驱动时,传动线系由备份动力源120输入,经过行星差速机构的中心轮130、行星架140、活动齿圈150及第二直齿齿轮副的第二输出轮180和第二输入轮190,最终输出到传动线系的输出端200。此模式下,传动线系的线系动力源110静止。
45.本发明一实施例还提供一种飞机传动线系,如图2所示,包括:本发明飞机传动线系上使用的差速装置、线系动力源110、备份动力源120和输出端200,差速装置分别与线系动力源110、备份动力源120、输出端200连接。
46.该差速装置,如图1所示包括:行星差速机构100、第一直齿齿轮副、第二直齿齿轮副,行星差速机构100分别与第一直齿齿轮副、第二直齿齿轮副连接,第一直齿齿轮副用于调整整个传动线系的传动比;第二直齿齿轮副用于调整传动线系的极性及备份动力源轴线与传动线系的距离;第一直齿齿轮副、第二直齿齿轮副在行星差速机构的控制作用下实现飞机传动线系的多种传动模式。
47.通过本发明的差速装置,能够实现在不同输入转速下的输出模式切换,从而满足飞机传动线系的不同功能需求。
48.以上仅表达了本技术的实施方式,其描述较为具体和详细,但且不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。另外,本发明未详尽部分均为常规技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1