传动系统的振动抑制方法、装置、设备及可读存储介质与流程
本发明涉及传动系统领域,特别是涉及一种传动系统的振动抑制方法,本发明还涉及一种传动系统的振动抑制装置、设备及计算机可读存储介质。
背景技术:
1、由于生产工艺精度不够等因素,传动系统的机械材料之间往往存在机械间隙,那么在传动系统所在设备的输出力矩的方向发生变化(输出力矩由正到负以及由负到正切换)时,机械传动就会依次经历弹性释放、间隙消除以及弹性建立的过程,在这个过程中,传动系统当中的主动传动以及从动传动部分便会出现撞击以及振动的情况,从而出现较大的噪音,影响了用户体验。
2、因此,如何提供一种解决上述技术问题的方案是本领域技术人员目前需要解决的问题。
技术实现思路
1、本发明的目的是提供一种传动系统的振动抑制方法,使得主动传动以较小速度差与从动传动完成重新齿合的过程,从而降低了两者产生的振动强度,降低了噪音,提升了用户体验;本发明的另一目的是提供一种传动系统的振动抑制装置、设备及计算机可读存储介质,使得主动传动以较小速度差与从动传动完成重新齿合的过程,从而降低了两者产生的振动强度,降低了噪音,提升了用户体验。
2、为解决上述技术问题,本发明提供了一种传动系统的振动抑制方法,包括:
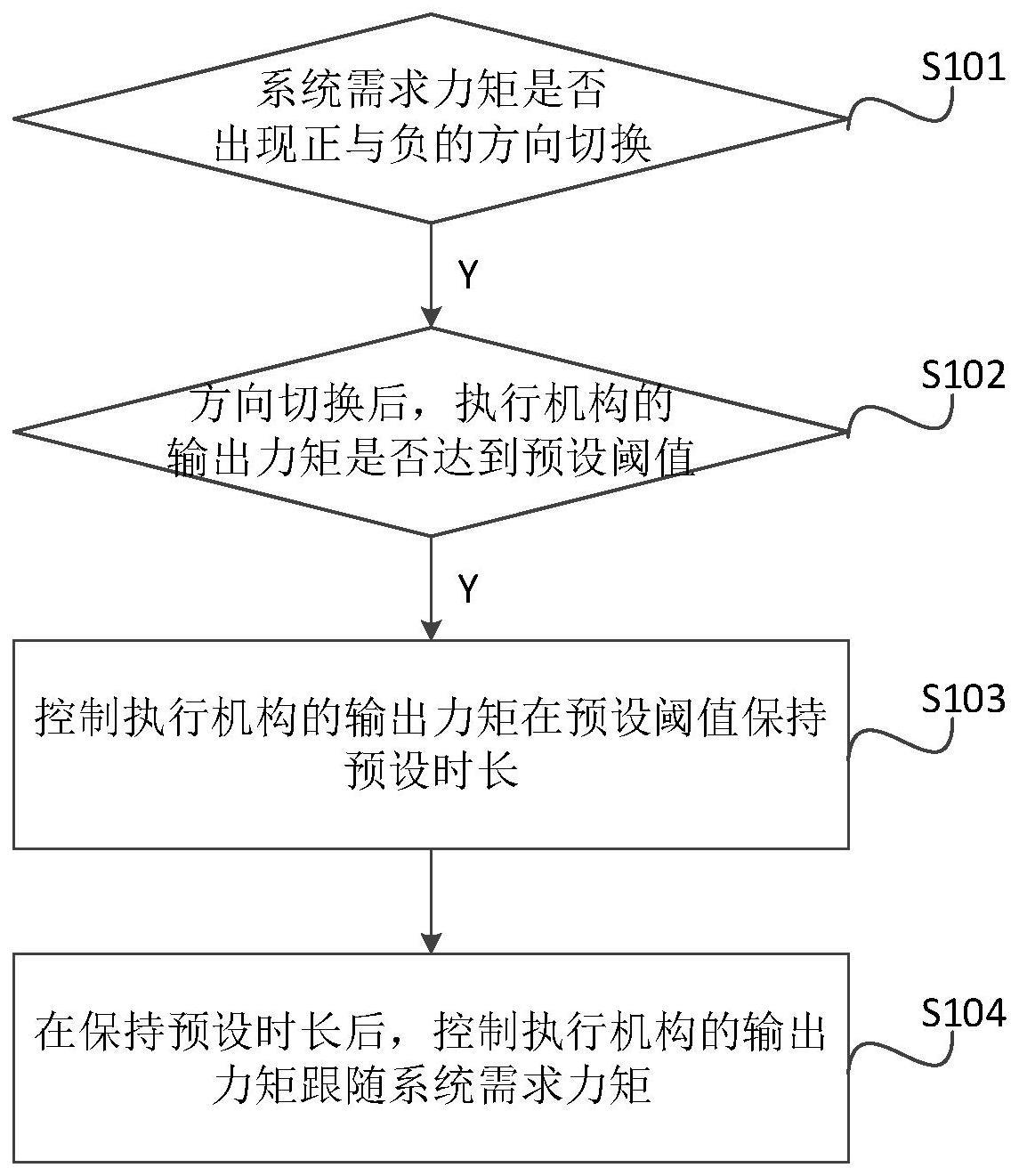
3、判断系统需求力矩是否出现正与负的方向切换;
4、若出现方向切换,则判断方向切换后,执行机构的输出力矩是否达到预设阈值;
5、若达到,则控制所述执行机构的输出力矩在所述预设阈值保持预设时长;
6、在保持所述预设时长后,控制所述执行机构的输出力矩跟随系统需求力矩。
7、优选地,所述若出现方向切换,则判断方向切换后,执行机构的输出力矩是否达到预设阈值具体为:
8、若所述系统需求力矩由负向正切换,判断方向切换后,执行机构的输出力矩是否达到第一子预设阈值;
9、若所述系统需求力矩由正向负切换,判断方向切换后,执行机构的输出力矩是否达到第二子预设阈值;
10、所述若达到,则控制所述执行机构的输出力矩在所述预设阈值保持预设时长具体为:
11、若达到所述第一子预设阈值,则控制所述执行机构的输出力矩在所述第一子预设阈值保持第一子预设时长;
12、若达到所述第二子预设阈值,则控制所述执行机构的输出力矩在所述第二子预设阈值保持第二子预设时长;
13、其中,所述预设阈值包括第一子预设阈值以及第二子预设阈值,所述第一子预设阈值为正值,所述第二子预设阈值为负值,所述预设时长包括第一子预设时长以及第二子预设时长。
14、优选地,所述预设阈值的标定过程为:
15、将预设阈值的待定值加上第一预设步长;
16、在系统需求力矩的正负方向切换过程中,控制所述输出力矩在当前的所述预设阈值的待定值处保持预设时长;
17、生成传动系统在所述系统需求力矩的正负方向切换过程中的转速波形;
18、判断是否达到预设终止条件;
19、若未达到,则执行所述将预设阈值的待定值加上第一预设步长的步骤;
20、若达到,则将生成的所有所述转速波形中稳定性最高的一者对应的所述待定值,作为所述预设阈值的标定值;
21、其中,在所述预设阈值为第一子预设阈值时,所述正负方向切换过程为由负向正,在所述预设阈值为第二子预设阈值时,所述正负方向切换过程为由正向负。
22、优选地,所述预设时长的标定过程为:
23、将预设时长的待定值加上第一预设步长;
24、在系统需求力矩的正负方向切换过程中,控制所述输出力矩在所述预设阈值处保持当前的所述预设时长的待定值;
25、生成传动系统在所述系统需求力矩的正负方向切换过程中的转速波形;
26、判断是否达到预设终止条件;
27、若未达到,则执行所述将预设时长的待定值加上第一预设步长的步骤;
28、若达到,则将生成的所有所述转速波形中稳定性最高的一者对应的所述待定值,作为所述预设时长的标定值;
29、其中,在所述预设时长为第一子预设时长时,所述正负方向切换过程为由负向正,在所述预设时长为第二子预设时长时,所述正负方向切换过程为由正向负。
30、优选地,所述生成传动系统在所述系统需求力矩的正负方向切换过程中的转速波形之后,所述判断是否达到预设终止条件之前,该传动系统的振动抑制方法还包括:
31、控制提示器显示所述转速波形;
32、所述将生成的所有所述转速波形中稳定性最高的一者对应的所述待定值,作为所述预设阈值的标定值具体为:
33、将通过人机交互装置接收到的其中一个所述预设阈值的待定值,作为所述预设阈值的标定值;
34、所述将生成的所有所述转速波形中稳定性最高的一者对应的所述待定值,作为所述预设时长的标定值具体为:
35、将通过人机交互装置接收到的其中一个所述预设时长的待定值,作为所述预设时长的标定值。
36、优选地,所述预设终止条件为:
37、在通过人机交互装置接收到终止指令时,判定达到预设终止条件。
38、优选地,传动系统的振动抑制方法还包括:
39、每隔预设周期,获取执行机构的输出力矩在正负方向切换过程的转速波形;
40、判断所述转速波形的预设指标是否符合预设标准;
41、若不符合,控制提示器进行提示。
42、为解决上述技术问题,本发明还提供了一种传动系统的振动抑制装置,包括:
43、第一判断模块,用于判断系统需求力矩是否出现正与负的方向切换,若出现方向切换,则触发第二判断模块;
44、所述第二判断模块,用于判断方向切换后,执行机构的输出力矩是否达到预设阈值,若达到,则触发保持模块;
45、所述保持模块,用于控制所述执行机构的输出力矩在所述预设阈值保持预设时长;
46、控制模块,用于在保持所述预设时长后,控制所述执行机构的输出力矩跟随系统需求力矩。
47、为解决上述技术问题,本发明还提供了一种传动系统的振动抑制设备,包括:
48、存储器,用于存储计算机程序;
49、处理器,用于执行所述计算机程序时实现如上所述传动系统的振动抑制方法的步骤。
50、为解决上述技术问题,本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述传动系统的振动抑制方法的步骤。
51、本发明提供了一种传动系统的振动抑制方法,考虑到在输出力矩换向之后,传动系统中主动传动与从动传动在重新齿合过程中的撞击,会随着撞击时速度差的增大而增大,并且由于较强能量的振动而产生较大噪音,因此本技术可以在出现力矩方向切换后,且在输出力矩达到预设阈值时,控制输出力矩在预设阈值保持预设时长,从而限制了主从传动的速度差增长,使得主动传动以较小速度差与从动传动完成重新齿合的过程,从而降低了两者产生的振动强度,降低了噪音,提升了用户体验。
52、本发明还提供了一种传动系统的振动抑制装置、设备及计算机可读存储介质,具有如上传动系统的振动抑制方法相同的有益效果。
- 还没有人留言评论。精彩留言会获得点赞!