一种高效的智能检测机器人的制作方法
1.本实用新型涉及检测机器人技术领域,特别是涉及一种高效的智能检测机器人。
背景技术:
2.管道内壁检测是管道维护中的重要步骤,目前通常采用高分辨率便携式x射线检测仪,检测仪在检测过程中利用csi转换屏将x射线转换成可见光,进而利用图像采集器获取射线数字图像和相机图像,并通过网络传输至电脑端,从而对管道内壁锈蚀情况进行分析,然而这种高分辨率便携式x射线管道锈蚀检测仪不仅造价较高,且光学系统调试复杂,对施工人员技术要求较高,不便于实际应用推广,另外检测仪需要安装爬行机构如履带、轮子等,以使得检测仪能够沿管道移动,但这种爬行方式需要排空管道中的液体,较为麻烦,且造成的影响较大。
3.授权公告号为cn214037364u的中国专利公开了一种管道检测机器人,包括:图像采集舱,该图像采集舱中安装有供采集管壁图像的相机;位于图像采集舱的一侧的超声舱,该超声舱安装有超声传感器,以供向管壁发射超声波并获取经管壁反射的水声波信号;连接于图像采集舱和超声舱之间的连接管;以及套设于图像采集舱且呈伞状的弧形板,且该弧形板的凹陷部分朝向超声舱,通过管道内的水流冲击弧形板,以推顶弧形板并带动图像采集舱和超声舱沿管道移动,其具有位于远离图像采集舱的功能舱的端部连接有供线缆穿过的牵引管,且该牵引管安装有线缆夹,以夹固线缆等优点。
4.但是上述已公开方案存在如下不足之处:上述方案不具有直径调节功能从而降低了上述装置对于不同直径管道的适应性,同时上述装置通过多段纵向连接的方式使得整体过长不便于安装和拆卸。
技术实现要素:
5.本实用新型的目的是针对背景技术中存在的技术问题,本实用新型提出一种高效的智能检测机器人,本实用新型通过转动结构能够适应不同直径大小的管道能够在不同管道内壁环境下保证本装置的行动自如同时记录管道内壁的多种数据,本装置结构紧凑能够便于携带的同时使用简便。
6.本实用新型提出了一种高效的智能检测机器人,包括摄像头、照明灯、连接柱、壳体、连接电缆、固定环、转动连接件、弹簧、弹簧连接件、驱动壳体、驱动履带、转动电机和转动连接杆;
7.摄像头底部与连接柱连接;连接柱远离摄像头的一端与壳体连接;壳体侧面上设有通讯接口;连接柱侧面与照明灯连接;照明灯底部与连接电缆连接;连接电缆远离照明灯的一端与连接柱连接;连接柱侧面与固定环连接;固定环侧面与转动连接件转动连接;转动连接件与弹簧连接;弹簧远离转动连接件的一端与弹簧连接件连接;弹簧连接件与驱动壳体转动连接;驱动壳体内部设有驱动电机,驱动电机与驱动履带传动连接;连接柱侧面与转动电机连接;转动电机输出端与转动连接杆连接;转动连接杆远离转动电机的一端与驱动
壳体转动连接。
8.优选的,固定环侧面与多组转动连接件转动连接,多组转动连接件呈圆周分布于连接柱侧面。
9.优选的,驱动壳体外端面上设有滑动凹槽,滑动凹槽与驱动履带滑动连接,滑动凹槽两侧上设有滑动限位件,滑动限位件与驱动履带侧面滑动连接。
10.优选的,连接柱与壳体接缝处设有密封件。
11.优选的,连接柱顶部上设有转动平台,转动平台内部设有转动电机,转动平台顶部与摄像头转动连接。
12.优选的,连接柱内部空心,连接柱内部设有电池,电池通过连接电缆与照明灯电性连接。
13.优选的,壳体上设有橡胶密封圈,橡胶密封圈与通讯接口边缘接缝处连接。
14.优选的,驱动履带外端面上设有缓冲层。
15.本实用新型的上述技术方案具有如下有益的技术效果:
16.本实用新型通过转动结构能够适应不同直径大小的管道能够在不同管道内壁环境下保证本装置的行动自如同时记录管道内壁的多种数据,本装置结构紧凑能够便于携带的同时使用简便,通过履带传动的结构能够有效的提高本装置在管道内壁上的防滑性能,同时对称的照明灯设置能够减少本装置在观测过程当中的死角阴影,从而保证了本装置的观测稳定性,通过弹簧和弹簧连接件的组合能够有效的提高本装置对于管道内壁施加的压力,从而能够有效的保证履带与管道内壁之间的传动稳定性。
附图说明
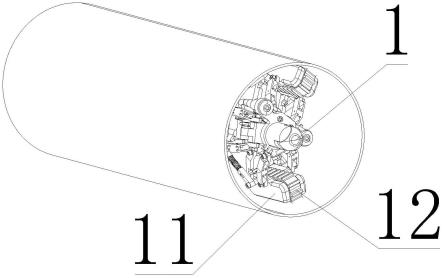
17.图1为本实用新型一种高效的智能检测机器人的实施例的结构示意图;
18.图2为本实用新型提出的一种高效的智能检测机器人中连接柱的结构示意图;
19.图3为本实用新型提出的一种高效的智能检测机器人中壳体的结构示意图;
20.附图标记:1、摄像头;2、照明灯;3、连接柱;4、壳体;5、通讯接口;6、连接电缆;7、固定环;8、转动连接件;9、弹簧;10、弹簧连接件;11、驱动壳体;12、驱动履带;13、转动电机;14、转动连接杆。
具体实施方式
21.实施例一
22.如图1-3所示,本实用新型提出的一种高效的智能检测机器人,包括摄像头1、照明灯2、连接柱3、壳体4、连接电缆6、固定环7、转动连接件8、弹簧9、弹簧连接件10、驱动壳体11、驱动履带12、转动电机13和转动连接杆14;
23.摄像头1底部与连接柱3连接;连接柱3远离摄像头1的一端与壳体4连接;壳体4侧面上设有通讯接口5;连接柱3侧面与照明灯2连接;照明灯2底部与连接电缆6连接;连接电缆6远离照明灯2的一端与连接柱3连接;连接柱3侧面与固定环7连接;固定环7侧面与转动连接件8转动连接;转动连接件8与弹簧9连接;弹簧9远离转动连接件8的一端与弹簧连接件10连接;弹簧连接件10与驱动壳体11转动连接;驱动壳体11内部设有驱动电机,驱动电机与驱动履带12传动连接;连接柱3侧面与转动电机13连接;转动电机13输出端与转动连接杆14
连接;转动连接杆14远离转动电机13的一端与驱动壳体11转动连接;连接柱与壳体4接缝处设有密封件;连接柱3顶部上设有转动平台,转动平台内部设有转动电机,转动平台顶部与摄像头1转动连接;连接柱3内部空心,连接柱3内部设有电池,电池通过连接电缆6与照明灯2电性连接;壳体4上设有橡胶密封圈,橡胶密封圈与通讯接口5边缘接缝处连接;驱动履带12外端面上设有缓冲层。
24.本实施例中,通过本装置能够在便携性和实用性方便产生有效的提高,本装置在工作状态时,转动电机13与转动连接杆14初始状态为紧贴连接柱3侧面,通过将本装置放置在管道内壁后根据管道内壁的直径进行动态调整,通过转动电机13带动转动连接杆14转动使得驱动壳体11和驱动履带12接触并挤压管道内壁,当弹簧9被压缩至一定程度时,转动电机13停止转动,此时本装置与管道内壁处于稳定的传动状态,通过驱动履带12能够带动本装置稳定的在管道内部进行移动,摄像头1和照明灯2的组合能够提高工作人员对于管道内壁的情况的观测效率,通过壳体4能够对本装置内部的多组传感器或机械结构进行有效的保护从而能够防止管道内部的环境对本装置内部结构产生影响,同时壳体4内部的结构能够在本装置进行观测的同时记录收集管道内部的各种数据,从而降低了工作人员的工作压力,提高了检测效率,同时壳体4的结构与摄像头1设置在连接柱3两端的结构能够使得本装置重心更加平衡从而保证了本装置的稳定运行。
25.实施例二
26.如图2-3所示,本实用新型提出的一种高效的智能检测机器人,相较于实施例一,本实施例中,固定环7侧面与多组转动连接件8转动连接,多组转动连接件8呈圆周分布于连接柱3侧面;驱动壳体11外端面上设有滑动凹槽,滑动凹槽与驱动履带12滑动连接,滑动凹槽两侧上设有滑动限位件,滑动限位件与驱动履带12侧面滑动连接。
27.本实用新型的一个实施例中,通过多组转动连接件8的组合能够从任意角度与管道内壁施加压力,从而能够保证本装置的驱动稳定性,通过滑动凹槽的结构能够减少驱动履带12脱落的风险。
28.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本实用新型宗旨的前提下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1