制动间隙自动调整臂的制作方法
1.本实用新型属于调整臂技术领域,涉及制动间隙调整臂。
背景技术:
2.汽车制动间隙是指制动鼓与制动蹄摩擦衬片之间必须保持的间隙,在长时间的摩擦中摩擦衬片会磨损而导致制动间隙越来越大,因此必须在制动机构中设置一个可自动调整制动蹄与制动鼓之间的制动间隙的调整臂,例如专利申请号为03279067.8的汽车制动间隙自动调整臂。当然市场上也有一些调整臂是需要驾驶员纯手动进行调整的。但是,无论是制动间隙自动调整臂还是手动调整臂,基本上都是单一功能(即制动间隙自动调整臂无法切换为手动调整,而手动调整臂也无法切换为自动调整臂),因此适用性不足。
3.为了解决上述问题,有人对现有汽车制动间隙自动调整臂的结构进行了改进并提交了专利申请号为201920514000.1的一种具备手动调整模式的自动调整臂,它包括壳体、蜗杆、左端盖和锁止套,蜗杆安装在壳体内部,蜗杆一端设置有蜗杆六角头,蜗杆六角头内侧设有台肩,蜗杆六角头外侧端面中心处开设有螺孔,锁止套安装在壳体外部,在蜗杆的蜗杆六角头一端壳体内侧装有左端盖,左端盖外侧端面开有限位孔,锁止套中心开有锁止套六角孔,锁止套一端设有凸台,其另一端设有限位柱。它通过锁止套的设置以及左端盖上设置限位孔,而具备了手动调整(即不会自动调整)与自动调整两种模式:当处于自动调整模式时,锁止套套装在蜗杆六角头上,锁止套的限位柱朝向蜗杆外侧方向,通过垫片与螺栓将锁止套固定安装在蜗杆的蜗杆六角头上,此时锁止套可随蜗杆一同转动,且不会影响制动间隙的自动调整功能;当处于手动调整模式时,将制动器与控制臂固定连接解除,并进行手动刹车间隙调整(由驾驶员利用扳手直接扳动蜗杆进行转动),间隙调整完毕后,重新安装锁止套,将锁止套换一个方向安装在蜗杆六角头,锁止头的限位柱装入左端盖内的限位孔内,从而将蜗杆锁死,使蜗杆不会发生转动,也不会因制动导致蜗杆回退放大间隙。
4.在实际中,左右两个车轮都有制动器,因此左右两边也都会安装有调整臂,在切换到手动调整模式时,驾驶员需要对左右两边的制动间隙都进行调整并且要尽量保证两边的制动间隙统一,这样才能保证车辆制动时不会出现侧翻的情况。然而,在上述具备手动调整模式的自动调整臂中,受限于左端盖本身体积以及钻头大小的问题,导致左端盖外侧端面上只能开设很少数量的限位孔(如其图中所示为两个),相邻两限位孔之间的夹角比较大而导致驾驶员不能扳动蜗杆进行小角度转动(否则的话限位柱就不能插入到对应的限位孔内),这样一来制动间隙就不能进行更精确地调节,导致左右两边制动间隙容易存在较大的误差而造成手动调整模式下车辆行驶安全性低。
技术实现要素:
5.本实用新型的目的是针对现有技术存在的上述问题,提出了一种制动间隙自动调整臂,解决了切换到制动间隙手动调整模式时车辆行驶安全性低的问题。
6.本实用新型的目的可通过下列技术方案来实现:
7.制动间隙自动调整臂,包括壳体以及设置于壳体内且在转动时能对制动间隙进行调节的大蜗杆,所述的壳体上固定有具有中心孔的封盖,大蜗杆的外端具有伸出封盖外的凸头,所述的凸头上可拆卸连接有切换套且两者周向固定,其特征在于,所述的封盖的中心孔内设有若干沿周向分布的齿形凹槽,切换套的一端侧部具有能卡入任意一个齿形凹槽内的配合部,切换套能通过换向安装使配合部卡入任意一个齿形凹槽内或是使配合部与齿形凹槽脱开。
8.本制动间隙自动调整臂通过在大蜗杆的凸头上可拆卸连接与凸头周向固定的切换套,使得驾驶员能通过切换套的换向安装来实现制动间隙自动调整功能的解除(即将制动间隙从自动调整状态切换为手动调整状态),这里的换向安装与背景技术中相同是指切换套可调转180
°
进行安装。其中,制动间隙为自动调整状态时,将切换套以配合部所在的一端为外端安装在大蜗杆的凸头上,此时切换套上的配合部与封盖外端口内的齿形凹槽脱离,使得大蜗杆能相对封盖进行自由转动,实现制动间隙的自动调节。需要切换为手动调整状态时,只需将切换套从凸头上拆下然后以配合部所在的一端为内端安装在大蜗杆的凸头上,此时切换套上的配合部会插入到封盖外端口内对应的其中一个齿形凹槽内,这样大蜗杆就与封盖周向固定而处于无法转动状态,从而使得制动间隙无法被自动调节。
9.在不涉及到调整臂内部结构改动的情况下,仅通过设置切换套并结合上封盖的微小改动,便可使本制动间隙自动调整臂具备了制动间隙的自动调整与手动调整的切换功能,因此结构更加简单且更易于实现。同时,驾驶员在进行切换操作时也非常方便,只需要针对切换套进行换向安装即可。
10.此外,制动机构是左右两边都有的,采用上述结构还能在制动间隙切换为手动调整状态时很好地减小左右两边的制动间隙之间的误差(即保证左右两边的制动间隙能更加统一),这是因为:相比于在封盖的端面上加工孔而言,受限于封盖本身体积以及钻头大小的问题,是无法在封盖的端面上加工出很多个孔的,但是在切换套的外端口内侧设置齿形凹槽则几乎没有数量的限制(可以做成连续分布),这样即使驾驶员手动转动大蜗杆很小的角度也可以保证封盖内有一个齿形凹槽能与该状态的切换套外的配合部相配合,大大地提高了制动间隙的手动调整精度。由于左右两边的制动间隙能更加统一,这也使得车辆在制动时更不容易出现侧翻情况,从而具备了更高的安全性。
11.在上述的制动间隙自动调整臂中,所述的齿形凹槽位于封盖的中心孔外端口处。
12.齿形凹槽位于封盖的中心孔外端口处,使得驾驶员能从外部直接观察到,这样驾驶员在本调整臂处于手动调整模式下对制动间隙进行精确调节后能很方便地将切换套的配合部卡入到所对应的齿形凹槽内。
13.在上述的制动间隙自动调整臂中,所述的大蜗杆侧部设有与封盖的中心孔孔壁相抵靠的密封圈,封盖的中心孔外端口内具有环形凸缘,各齿形凹槽设于环形凸缘的中心孔孔壁上。
14.将封盖设计为上述结构,既满足了大蜗杆与封盖之间的正常密封需求,又保证封盖能通过齿形凹槽的设置供切换套上的配合部卡入以解除制动间隙的自动调整状态。而且,相比于直接在封盖的中心孔外端孔口内加工齿形凹槽来说(加工难度很大),在环形凸缘的中心孔加工多个数量的齿形凹槽要更加容易。
15.在上述的制动间隙自动调整臂中,所述的切换套沿轴向包括结合段与脱离段,脱
离段的外径小于环形凸缘的中心孔径,配合部设于结合段上。
16.当切换套以脱离段朝内安装在凸头上时,蜗杆处于能自由转动的状态,即制动间隙处于能被自动调整状态,保证了结构的可靠性;当切换套以结合段朝内安装在凸头上时,配合部会卡入到与其位置相对应的齿形凹槽内,使得蜗杆与封盖周向固定而无法被转动,进而解除制动间隙的自动调整。
17.在上述的制动间隙自动调整臂中,所述的脱离段的长度与结合段的长度均大于环形凸缘的厚度。
18.脱离段的长度大于环形凸缘的厚度,意味着切换套以脱离段朝内安装在凸头上时,能拉长该状态下配合部与齿形凹槽之间的距离,保证结构的可靠性;结合段的长度大于环形凸缘的厚度,可以保证配合部与齿形凹槽之间能形成充分、有效的接触,保证结构的可靠性。
19.在上述的制动间隙自动调整臂中,所述的凸头的横截面呈扁方状,切换套具有与凸头形状相配合的内孔,结合段呈六角状且配合部为结合段边缘的其中一个角。
20.在传统的制动间隙自动调整臂或背景技术中提到的具备手动调整模式的自动调整臂中,蜗杆的外端都是呈六角状的,这是为了方便配合专用扳手进行初始制动间隙的调整。而在本制动间隙自动调整臂中,通过将凸头的横截面设置为呈扁方状并直接将结合段设置为呈六角状(加工时,对原有的蜗杆六角头进行切削使其变小),使得当调整臂处于制动间隙自动调整模式时,可由驾驶员直接利用原有专用扳手套在结合段上来扳动切换套带动蜗杆进行转动实现初始制动间隙的调整,这样设置使得驾驶员无需将切换套拆下(背景技术中提到的具备手动调整模式的自动调整臂在进行初始制动间隙的调整时是需要将锁止套拆下的)。
21.在上述的制动间隙自动调整臂中,所述的凸头端部可拆卸连接有能防止切换套从凸头上脱出的限位件。
22.在上述的制动间隙自动调整臂中,所述的限位件为螺钉,凸头端部设有连接孔,螺钉杆部螺纹连接在连接孔内且切换套与螺钉头部靠近封盖的一侧相抵靠。
23.切换套与螺钉头部靠近封盖的一侧相抵靠,使得切换套沿轴向被固定在凸头上。当需要切换工作模式时,只需将螺钉旋下即可对切换套进行换向安装。
24.在上述的制动间隙自动调整臂中,作为另一种技术方案,所述的凸头端部外侧设有卡槽,限位件为内缘卡在卡槽内的卡簧且切换套与卡簧靠近封盖的一侧相抵靠。
25.切换套与卡簧靠近封盖的一侧相抵靠,使得切换套沿轴向被固定在凸头上。当需要切换工作模式时,只需将卡簧拆下即可对切换套进行换向安装。
26.与现有技术相比,本制动间隙自动调整臂通过在封盖外端口内侧设置齿形凹槽并在切换套的一端侧部设置能卡入任意一个齿形凹槽内的配合部,齿形凹槽由于设置在封盖外端口内而可以几乎没有数量的限制,这样即使驾驶员手动转动大蜗杆很小的角度也可以保证封盖内有一个齿形凹槽能与该状态的切换套外的配合部相配合,大大地提高了制动间隙的手动调整精,从而使得左右两边的制动间隙能更加统一,这也使得车辆在制动时更不容易出现侧翻情况,具备了更高的安全性和实用性。
附图说明
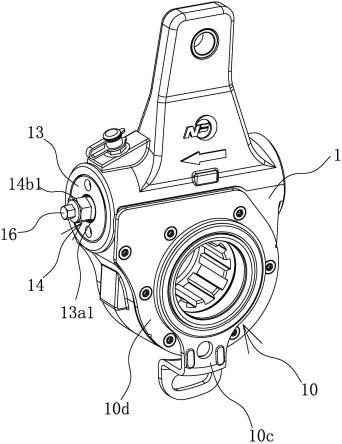
27.图1是本制动间隙自动调整臂实施例一处于自动调整状态时的示意图。
28.图2是本制动间隙自动调整臂实施例一处于自动调整状态时的侧视图。
29.图3是图2中a-a向的剖视图。
30.图4是本制动间隙自动调整臂实施例一处于自动调整状态时的正视图。
31.图5是图4中b-b向的剖视图。
32.图6是图4中c-c向的剖视图。
33.图7是本制动间隙自动调整臂实施例一处于自动调整状态时的分解示意图。
34.图8是封盖的示意图。
35.图9是切换套的示意图。
36.图10是大蜗杆的示意图。
37.图11是本制动间隙自动调整臂实施例一处于手动调整状态时的示意图。
38.图12是本制动间隙自动调整臂实施例一处于手动调整状态时的剖视图(剖视位置与方向和图6相同)。
39.图中,1、壳体;2、大蜗杆;2a、凸头;2a1、连接孔;3、大蜗轮;4、小蜗轮;5、弹簧螺盖;6、蜗杆弹簧;7、蜗杆弹簧座;8、小蜗杆;9、离合器齿轮;10、控制臂组件;10a、控制臂齿轮;10b、控制臂齿套;10c、控制臂;10d、盖板;11、离合器中牙轮;12、小蜗杆牙轮;13、封盖;13a、环形凸缘;13a1、齿形凹槽;14、切换套;14a、脱离段;14b、结合段;14b1、配合部;14c、配合面;15、密封圈;16、限位件。
具体实施方式
40.以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
41.实施例一
42.如图1-图5所示,制动间隙自动调整臂,包括壳体1以及均设置于壳体1内的大蜗轮3、大蜗杆2与小蜗轮4,大蜗杆2与大蜗轮3相啮合且小蜗轮4套接在大蜗杆2上并靠近大蜗杆2外端位置处,大蜗杆2侧部与小蜗轮4内端部均具有锥形齿,壳体1上固定有弹簧螺盖5且壳体1内设有蜗杆弹簧6和蜗杆弹簧座7,蜗杆弹簧6通过蜗杆弹簧座7作用于大蜗杆2内端上使大蜗杆2上的锥形齿与小蜗轮4上的锥形齿相配合。壳体1内还设有位于小蜗轮4侧部的单向离合装置,单向离合装置包括小蜗杆8和离合器齿轮9,小蜗杆8和离合器齿轮9通过一对相互啮合的单向齿轮相连接,在大蜗轮3的端部设有一个控制臂组件10,离合器齿轮9与控制臂组件10相配合。具体地,单向离合装置还包括离合器中牙轮11和小蜗杆牙轮12,离合器齿轮9套在离合器中牙轮11外且两者周向固定,小蜗杆牙轮12固连于小蜗杆8端部,离合器中牙轮11与小蜗杆牙轮12通过单向齿牙相互啮合。控制臂组件10包括控制臂齿轮10a、控制臂齿套10b、控制臂10c和盖板10d,控制臂齿轮10a套接于控制臂齿套10b上,控制臂齿轮10a、控制臂齿套10b及控制臂10c相互固连在一起,盖板10d固定在壳体1上,控制臂齿轮10a与离合器齿轮9相啮合。具体地,离合单向装置及控制臂组件10的具体结构以及本制动间隙自动调整臂在自动调整制动间隙时的工作原理可参照专利申请号为03279067.8的汽车制动间隙自动调整臂,在此不再赘述。
43.如图1、图2、图3、图7、图8、图9和图10所示,壳体1上还固定有具有中心孔的封盖13,大蜗杆2的外端具有伸出封盖13外的凸头2a。凸头2a上可拆卸连接有可换向安装的切换套14且两者周向固定,封盖13的中心孔内设有若干沿周向分布的齿形凹槽13a1,切换套14的一端侧部具有卡入任意一个齿形凹槽13a1内的配合部14b1,切换套14能通过换向安装使配合部14b1卡入任意一个齿形凹槽13a1内或是使配合部14b1与齿形凹槽13a1脱开。具体地,齿形凹槽13a1设于封盖13的中心孔外端口处,大蜗杆2侧部设有与封盖13的中心孔孔壁相抵靠的密封圈15,封盖13的中心孔孔壁外端口内具有环形凸缘13a,各齿形凹槽13a1设于环形凸缘13a的中心孔孔壁上。在本调整臂处于制动间隙可自动调整状态时,要求蜗杆能向外移动,因此要保证蜗杆与环形凸缘13a之间有间隙。在本实施例中,齿形凹槽13a1的数量为24个,各齿形凹槽13a1通过冲压方式一次成型而成。在具体生产时,可利用冲头对环形凸缘13a中心进行冲压,从而使其中心孔的孔壁上能一次性成型出各齿形凹槽13a1,实际在冲压完成后可以对封盖13进行热处理以提高其自身硬度。
44.进一步地,如图7、图9和图10所示,凸头2a的横截面呈扁方状,切换套14具有与凸头2a形状相配合的内孔。具体地,在凸头2a的侧部具有平直面,切换套14的内孔中具有与该平直面相抵靠的配合面14c,通过配合面14c与该平直面相抵靠可防止凸头2a与切换套14出现相对转动。如图3、图7和图9所示,切换套14沿轴向包括结合段14b与脱离段14a,脱离段14a的外径小于环形凸缘13a的中心孔径,且脱离段14a的长度与结合段14b的长度均大于环形凸缘13a的厚度,配合部14b1设于结合段14b上。脱离段14a呈光杆状,结合段14b呈六角状且配合部14b1为结合段14b边缘的其中一个角。如图1、图3和图7所示,凸头2a端部可拆卸连接有能防止切换套14从凸头2a上脱出的限位件16,限位件16实际为螺钉,凸头2a端部设有连接孔2a1,螺钉杆部螺纹连接在连接孔2a1内且切换套14与螺钉头部靠近封盖13的一侧相抵靠。螺钉拆下时,驾驶员可直接将切换套14从凸头2a上取下进行换向安装。
45.本制动间隙自动调整臂通过在大蜗杆2的凸头2a上可拆卸连接与凸头2a周向固定的切换,使得驾驶员能通过切换套14的换向安装来实现制动间隙自动调整功能的解除(即将制动间隙从自动调整状态切换为手动调整状态)。其中,制动间隙为自动调整状态时,如图1、图3和图6所示,将切换套14以脱离段14a朝内安装在大蜗杆2的凸头2a上,此时切换套14上的配合部14b1与封盖13外端口内的齿形凹槽13a1脱离,使得大蜗杆2能相对封盖13进行自由转动,实现制动间隙的自动调节(具体是如何调节的可参照上面提到的专利申请号为03279067.8的汽车制动间隙自动调整臂)。需要切换为手动调整状态时,如图11和图12所示,只需将切换套14从凸头2a上拆下然后以结合段14b朝内安装在大蜗杆2的凸头2a上,配合部14b1设于结合段14b的侧部,因此此时切换套14上的配合部14b1会插入到封盖13外端口内对应的其中一个齿形凹槽13a1内,这样大蜗杆2就与封盖13周向固定而处于无法转动状态,从而使得制动间隙无法被自动调节。
46.值得注意的是,齿形凹槽13a1设置在切换套14的外端口内,使得齿形凹槽13a1的数量可以没有限制,这样即使驾驶员手动转动大蜗杆2很小的角度也可以保证封盖13内有一个齿形凹槽13a1能与该状态的切换套14外的配合部14b1相配合,大大地提高了制动间隙的手动调整精度。由于左右两边的制动间隙能更加统一,这也使得车辆在制动时更不容易出现侧翻情况,从而具备了更高的安全性。
47.实施例二
48.本实施例同实施例一的结构及原理基本相同,不同之处在于:在本实施例中,凸头2a端部外侧设有卡槽,限位件16为内缘卡在卡槽内的卡簧且切换套14与卡簧靠近封盖13的一侧相抵靠。
49.实施例三
50.本实施例同实施例一的结构及原理基本相同,不同之处在于:在本实施例中,齿形凹槽13a1的数量为36个。
51.实施例四
52.本实施例同实施例一的结构及原理基本相同,不同之处在于:在本实施例中,齿形凹槽13a1的数量为30个。
53.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1