一种机器人教学用悬挂支架的制作方法
1.本实用新型涉及机器人教学技术领域,更具体地说,本实用新型涉及一种机器人教学用悬挂支架。
背景技术:
2.随着人工智能技术、计算机技术等相关技术的发展,对智能机器人的研究越来越多,在教育领域,许多院校已在学生中开设了机器人学方面的有关课程,为了满足机器人学方面的有关课程教学示范和实验教学的需求,需要对机器人进行展示教学,其中包括人型机器人,因此当对人型机器人进行展示时需要使用相应的悬挂支架。
3.但是其在实际使用时,仍旧存在一些缺点,如:现有的悬挂支架大多数结构相对固定,因此不能根据所需要悬挂机器人的具体高度对支架本身的高度进行相应的调整,因此会影响悬挂支架的正常使用;并且悬挂支架未设置相应的转动组件,因此教师无法便捷地对机器人进行多方位展示,从而会耽误正常的教学进度。
技术实现要素:
4.为了克服现有技术的上述缺陷,本实用新型的实施例提供一种机器人教学用悬挂支架,以解决现有技术悬挂支架不能进行高度调整以及未设置转动组件的问题。
5.为解决上述技术问题,本实用新型提供如下技术方案:一种机器人教学用悬挂支架,包括底座,所述底座的顶面活动安装有升降组件,所述升降组件的顶面固定安装有连接杆,所述连接杆的表面活动安装有转动组件;
6.所述升降组件包括底柱,所述底柱内部的底面固定安装有限位柱,所述底柱的内部固定安装有驱动装置。
7.其中,所述驱动装置的顶面固定安装有主动齿轮,所述限位柱的表面活动安装有升降柱。
8.其中,所述升降柱包括柱体,所述柱体的底面固定安装有限位板,所述柱体的侧面固定安装有齿条,所述齿条的表面啮合有第一从动齿轮,所述齿条的内部固定安装有连接轴,所述连接轴的一端固定安装有第二从动齿轮。
9.其中,所述转动组件包括安装块,所述安装块的底面固定安装有固定盘,所述固定盘的侧面可拆卸安装有插柱,所述固定盘的内部活动安装有转动环,所述转动环的内部固定安装有安装盘,所述安装盘的底面活动安装有移动块,所述移动块的底面固定安装有卡环。
10.其中,所述第二从动齿轮的表面与主动齿轮的表面啮合,所述限位板的内部与限位柱的表面活动连接,所述连接轴的一端与底柱的内壁活动连接,所述柱体的底面与底柱的内部活动连接。
11.其中,所述安装块的内部与连接杆的表面固定连接,所述插柱的表面与转动环的表面活动连接。
12.本实用新型的上述技术方案的有益效果如下:
13.上述方案中,设置升降组件,通过驱动装置带动主动齿轮进行转动,使得主动齿轮表面所啮合的第二从动齿轮能够进行同步转动,因此通过第二从动齿轮内部的连接轴能够带动两个第一从动齿轮进行转动,并且在齿条的表面进行啮合,由于柱体底面安装有限位板,并且限位板活动于限位柱的表面,因此通过齿条与第一从动齿轮的啮合能够使柱体在底柱的内部进行一定高度的升降,从而达到了提高装置实用性的效果;设置转动组件,通过转动环在固定盘的内部进行转动,使得转动环内部所安装的移动块能够进行同步转动,并且当插柱安装在固定盘和转动环的内部,能够使得转动环处于固定状态,避免了机器人在悬挂展示时出现意外地转动而影响展示的效果,通过移动块在安装盘的底面进行水平移动,使得两个卡环能够进行相向或背向移动,因此通过卡环能够套接在人型机器人的手臂处,以达到对机器人悬挂的目的,方便教师进行教学工作,从而达到了提高装置便捷性的效果。
附图说明
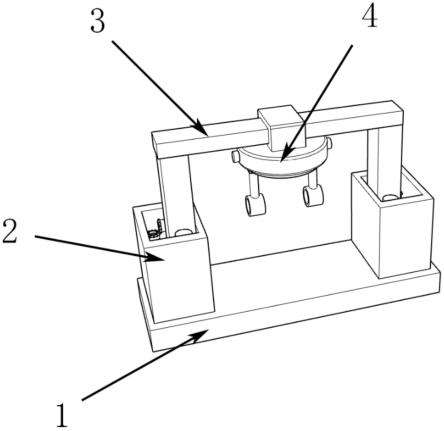
14.图1为本实用新型的整体结构示意图;
15.图2为本实用新型的整体装置立体装配图;
16.图3为本实用新型的升降组件结构示意图;
17.图4为本实用新型的升降柱结构示意图;
18.图5为本实用新型的转动组件结构示意图。
19.[附图标记]
[0020]
1、底座;2、升降组件;3、连接杆;4、转动组件;21、底柱;22、限位柱;23、驱动装置;24、主动齿轮;25、升降柱;251、柱体;252、限位板;253、齿条;254、第一从动齿轮;255、连接轴;256、第二从动齿轮;41、安装块;42、固定盘;43、插柱;44、转动环;45、安装盘;46、移动块;47、卡环。
具体实施方式
[0021]
为使本实用新型要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
[0022]
如附图1至附图5本实用新型的实施例提供一种机器人教学用悬挂支架,包括底座1,所述底座1的顶面活动安装有升降组件2,所述升降组件2的顶面固定安装有连接杆3,所述连接杆3的表面活动安装有转动组件4;
[0023]
所述升降组件2包括底柱21,所述底柱21内部的底面固定安装有限位柱22,所述底柱21的内部固定安装有驱动装置23。
[0024]
其中,如图3至图4,所述驱动装置23的顶面固定安装有主动齿轮24,所述限位柱22的表面活动安装有升降柱25,所述升降柱25包括柱体251,所述柱体251的底面固定安装有限位板252,所述柱体251的侧面固定安装有齿条253,所述齿条253的表面啮合有第一从动齿轮254,所述齿条253的内部固定安装有连接轴255,所述连接轴255的一端固定安装有第二从动齿轮256,所述第二从动齿轮256的表面与主动齿轮24的表面啮合,所述限位板252的内部与限位柱22的表面活动连接,所述连接轴255的一端与底柱21的内壁活动连接,所述柱
体251的底面与底柱21的内部活动连接,通过设置的主动齿轮24结构,在驱动装置23的带动能够使主动齿轮24进行转动,因此主动齿轮24能够带动第一从动齿轮254和第二从动齿轮256进行转动,因此配合限位柱22,使得柱体251能够在底柱21的内部进行一定高度的升降。
[0025]
其中,如图5,所述转动组件4包括安装块41,所述安装块41的底面固定安装有固定盘42,所述固定盘42的侧面可拆卸安装有插柱43,所述固定盘42的内部活动安装有转动环44,所述转动环44的内部固定安装有安装盘45,所述安装盘45的底面活动安装有移动块46,所述移动块46的底面固定安装有卡环47,所述安装块41的内部与连接杆3的表面固定连接,所述插柱43的表面与转动环44的表面活动连接,通过设置移动块46结构,使得移动块46在安装盘45底面水平移动时,能够带动卡环47进行相向或背向移动,因此卡环47可以套接在人型机器人的手臂上,以达到对机器人进行悬挂展示的目的。
[0026]
本实用新型的工作过程如下:通过驱动装置23带动主动齿轮24进行转动,使得主动齿轮24表面所啮合的第二从动齿轮256能够进行同步转动,因此通过第二从动齿轮256内部的连接轴255能够带动两个第一从动齿轮254进行转动,并且在齿条253的表面进行啮合,由于柱体251底面安装有限位板252,并且限位板252活动于限位柱22的表面,因此通过齿条253与第一从动齿轮254的啮合能够使柱体251在底柱21的内部进行一定高度的升降;通过转动环44在固定盘42的内部进行转动,使得转动环44内部所安装的移动块46能够进行同步转动,并且当插柱43安装在固定盘42和转动环44的内部,能够使得转动环44处于固定状态,避免了机器人在悬挂展示时出现意外地转动而影响展示的效果,通过移动块46在安装盘45的底面进行水平移动,使得两个卡环47能够进行相向或背向移动,因此通过卡环47能够套接在人型机器人的手臂处,以达到对机器人悬挂的目的。
[0027]
最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
[0028]
其次:本实用新型公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本实用新型同一实施例及不同实施例可以相互组合;
[0029]
最后:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1