一种相控阵声学多普勒流速剖面仪的制作方法
1.本实用新型属于遥测监控技术技术领域,具体涉及一种相控阵声学多普勒流速剖面仪。
背景技术:
2.在海洋相关测量中,某区域海水剖面流速测量是最重要的观测要素之一,海水流场数据是海洋相关研究最基本的信息,目前,海水流场剖面流速测试的主要方法为:将配置好工作任务和参数的声学多普勒流速剖面仪,简称adcp,当adcp向水体中发射的声波脉冲信号碰到水体中悬浮的、随水体运动的微粒后产生反射,adcp可以根据被反射到adcp的声波脉冲信号和adcp发射的声波脉冲信号频率的差异(即多普勒频移),计算出相对于adcp的流速大小。
3.但该adcp在使用过程中,发现上述技术至少存在如下问题:一、adcp在水下进行测量工作时,经常受到暗流的冲击,容易使内部电池位置发生偏移,与其他部件碰撞,造成损坏,二、adcp在工作时候需要经常转换方向测量不同方位的流速,常规的活塞换能器式adcp体积较大,比较笨重,安装不够方便,且活塞换能器的角度是固定的,因此不能对发射与接收的波束方向进行调整,此外,由于海洋中声速随环境而变化,若采用固定值必然会带来测速误差,因此必须进行声速补偿,这也增加了系统规模与复杂度。
技术实现要素:
4.实用新型目的:提供一种相控阵声学多普勒流速剖面仪,解决了现有技术存在的上述问题。
5.技术方案:一种相控阵声学多普勒流速剖面仪,包括:外壳,所述外壳的前端连接有相控换能器,所述外壳内侧设有保护蓄电池的缓冲机构,所述外壳顶端设有用于转动外壳的转动机构。
6.在进一步实施例中,所述相控换能器由2144个厚度相等的正方体压电陶瓷颗粒排列而成。
7.在进一步实施例中,所述相控换能器是一个平面阵,平面阵可发射四个对称的波束。
8.在进一步实施例中,平面阵分为两部分,分别用来产生x方向和y方向的波束,x方向和y方向都同时产生对称的两个波束,且四个波束均具有固定角度。
9.在进一步实施例中,所述外壳的内壁通过缓冲机构连接有蓄电池,所述蓄电池通过电路与相控换能器电性连接。
10.在进一步实施例中,所述缓冲机构的内部包括四个套筒,所述套筒与外壳固定连接,所述套筒的内部连接有阻尼器,所述阻尼器的一端连接有连接杆,所述阻尼器的外侧套接有弹簧,所述弹簧的一端与连接杆固定连接,所述弹簧的另一端与套筒固定连接,所述连接杆的一端贯穿套筒的内部连接有弧形板,所述弧形板与蓄电池固定连接。
11.在进一步实施例中,所述转动机构包括设置在外壳上方的密封盖,所述密封盖的顶端内嵌有轴承,所述轴承的内部连接有安装支架,所述安装支架的末端连接有第二齿轮,所述密封盖的内壁靠近轴承的位置连接有伺服电机,所述伺服电机通过电路与外部控制器电性连接,所述伺服电机输出轴的一端连接有第一齿轮,所述第一齿轮与第二齿轮啮合连接。
12.有益效果:
13.1、设置有相控换能器,相控换能器平面阵是一个圆面阵,由厚度相等的正方体压电陶瓷颗粒排列而成,圆面阵由于其形态特性比较容易和载体形成共形结构,从而避免气泡对测量结果的影响,还能通过相控延时来调整发射接收波束的指向性,并且可以做到免除声速补偿,因此在实际应用中的优势已经越来越明显;
14.2、设置有连接杆、阻尼器、弹簧和弧形板,当外壳受到外力冲击时,通过弹簧和阻尼器的配合作用下,有利于对冲击力进行缓冲,达到减小冲击、保护电池的效果;
15.3、设置有安装支架、伺服电机、第一齿轮和第二齿轮,通过安装支架将该相控阵adcp固定在船上,开启伺服电机,带动第一齿轮旋转,通过第一齿轮和第二齿轮的连接作用下,带动伺服电机绕安装支架做圆周运动,进而实现带动密封盖和外壳进行角度调整,有利于对该相控阵adcp探测的角度进行调整。
附图说明
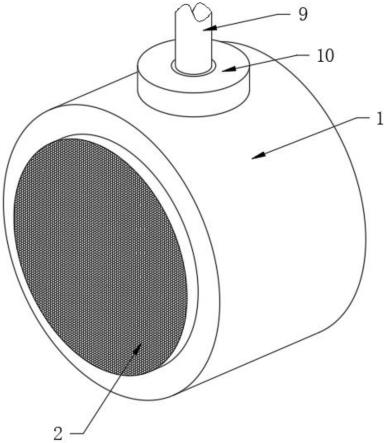
16.图1是本实用新型的结构示意图;
17.图2是本实用新型外壳的内部剖视图;
18.图3是本实用新型相控阵adcp的四波束示意图;
19.图4是本实用新型相控换能器圆形平面阵的布阵图;
20.图5是本实用新型相控换能器发射状态时的四个波束;
21.图6是本实用新型相控换能器接收状态时x方向的左波束;
22.图7是本实用新型相控换能器正下方单波束发射状态下的波束图;
23.图8是本实用新型密封盖的剖视图。
24.图中附图标记为:1、外壳;2、相控换能器;3、弧形板;4、蓄电池;5、套筒;6、连接杆;7、阻尼器;8、弹簧;9、安装支架;10、密封盖;11、轴承;12、伺服电机;13、第一齿轮;14、第二齿轮。
具体实施方式
25.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面将结合附图对本实用新型作进一步的详细介绍。
26.如图1-图7所示,一种相控阵声学多普勒流速剖面仪,包括:外壳1,外壳1的前端连接有相控换能器2,外壳1内侧设有保护蓄电池的缓冲机构,外壳1顶端设有用于转动外壳1的转动机构,如图1所示,相控阵adcp的工作原理是通过水声平面阵换能器将电信号转化为声信号,对其发射指向性进行一定的相控后向水中发射,声波碰到水体中的散射体以及水底时会被散射,进而被相控阵adcp所接收并进行相关的处理,获得所测水域的断面流速剖面,当由于水深较深使得声波无法到达水底时,paadcp相对于水底的运动速度也可以通过
gps定位等辅助传感设备来测得,对测得的水体流速和相控阵adcp自身相对于水底的运动速度作差,便可得到水体相对于水底的流速,深度不同的水层,其散射的回波信号被接收到的时间也不相同,这样就会使得paadcp得到一个流速剖面,而且四个关于平面阵轴线对称的不同指向波束让相控阵adcp不仅能测得不同水层的流速大小,还能测得水流的方向。
27.如图1所示,相控换能器2由2144个厚度相等的正方体压电陶瓷颗粒排列而成,如图4所示,将h1、h2、h3、h4方向的阵元(黑色阵元)并联起来,可以得到x方向的四个子阵,同理,将v1、v2、v3、v4方向的阵元(白色阵元)并联起来,便可得到y方向的四个子阵,相控换能器2是一个平面阵,通过设置有相控换能器2,相控换能器2平面阵是一个圆面阵,由厚度相等的正方体压电陶瓷颗粒排列而成,圆面阵由于其形态特性比较容易和载体形成共形结构,从而避免气泡对测量结果的影响,还能通过相控延时来调整发射接收波束的指向性,并且可以做到免除声速补偿。
28.如图3所示,平面阵可发射四个对称的波束,平面阵分为两部分,分别用来产生x方向和y方向的波束,x方向和y方向都同时产生对称的两个波束,且四个波束均具有固定角度,如图5所示,当相控换能器平面阵处于发射状态时,对h1、h2输入相同信号,对h3、h4输入与之幅度相同,相位相反的信号,即对第二级二元子阵进行π的相位补偿,则可得到x方向的一对对称波束,与平面阵法线夹角为θ。同理,对v1、v2输入相同信号,对v3、v4输入与之幅度相同,相位相反的信号,即对第二级而元子阵进行π的相位补偿,则可得到y方向的一对对称波束,与平面阵法线夹角也为θ,此时,平面阵可发射四个对称的波束;
29.如图6所示,当相控平面阵处于接收状态时,在x方向上,对h1、h2、h3、h4的接收信号相位分别相移
±
π/2、
±
π、
±
3π/2,则分别可以得到x方向上的右波束或左波束,如图4所示,同理,对v1、v2、v3、v4的接收信号相位分别相移
±
π/2、
±
π、
±
3π/2,则分别可得到y方向上的前波束和后波束,从而实现单波束通道的区分接收。
30.如图7所示,在既定的换能器发射ping次里面,去固定间隔的ping次给全部阵元同加载信号源,无相移,无延时,可以得到一个指向性较好的能量集中在正下方的能量波形,接收时,在正下方无延时无相移也会得到图5的接受能量指向,根据低跟踪的回波算法计算,计算出当个ping次的水深,以600khz换能器为例,分时测深状态下的单波束波束角约为3-4度,此种分时测深可用一个换能器代替原来五个换能器的活塞是测深adcp,大大降低了成本的同时也节省了大量的空间,使得仪器小巧轻便还省钱。
31.实施例2:
32.本实施例的具体结构,如图1-8所示,外壳1的内壁通过缓冲机构连接有蓄电池4,蓄电池4通过电路与相控换能器2电性连接。
33.如图2所示,缓冲机构的内部包括四个套筒5,套筒5与外壳1固定连接,套筒5的内部连接有阻尼器7,阻尼器7的一端连接有连接杆6,阻尼器7的外侧套接有弹簧8,弹簧8的一端与连接杆6固定连接,弹簧8的另一端与套筒5固定连接,连接杆6的一端贯穿套筒5的内部连接有弧形板3,弧形板3与蓄电池4固定连接,通过设置有连接杆6、阻尼器7、弹簧8和弧形板3,当外壳1受到外力冲击时,通过弹簧8和阻尼器7的配合作用下,有利于对冲击力进行缓冲,达到减小冲击、保护电池的效果。
34.如图8所示,转动机构包括设置在外壳1上方的密封盖10,密封盖10的顶端内嵌有轴承11,轴承11的内部连接有安装支架9,安装支架9的末端连接有第二齿轮14,密封盖10的
内壁靠近轴承11的位置连接有伺服电机12,伺服电机12通过电路与外部控制器电性连接,伺服电机12输出轴的一端连接有第一齿轮13,第一齿轮13与第二齿轮14啮合连接,通过设置有安装支架9、伺服电机12、第一齿轮13和第二齿轮14,通过安装支架9将该相控阵adcp固定在船上,开启伺服电机12,带动第一齿轮13旋转,通过第一齿轮13和第二齿轮14的连接作用下,带动伺服电机12绕安装支架9做圆周运动,进而实现带动密封盖10和外壳1进行角度调整,有利于对该相控阵adcp探测的角度进行调整。
35.工作原理:当外壳1受到外力冲击时,通过弹簧8和阻尼器7的配合作用下,有利于对冲击力进行缓冲,达到减小冲击、保护电池的效果,开启伺服电机12,带动第一齿轮13旋转,通过第一齿轮13和第二齿轮14的连接作用下,带动伺服电机12绕安装支架9做圆周运动,进而实现带动密封盖10和外壳1进行角度调整,有利于对该相控阵adcp探测的角度进行调整。
36.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本实用新型对各种可能的组合方式不再另行说明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1