一种滑台制动机构及腹腔镜手术机器人的制作方法
1.本实用新型涉及手术机器人技术领域,具体而言,涉及一种滑台制动机构及腹腔镜手术机器人。
背景技术:
2.随着科技的发展与进步,腹腔镜手术机器人系统技术在手术治疗中得到越来越广泛的应用。腹腔镜手术机器人由医生控制台、患者手术平台、影像台车等部分组成。器械滑台是患者手术平台重要组成部分之一,其主要作用是用于安装手术器械,提供手术器械动力,以及传递手术臂运动,提供器械往复运动的载体。现有的器械滑台在失电时,无法控制手术器械,手术器械会在失电后掉落,影响手术效果。
技术实现要素:
3.本实用新型所要解决的问题是如何在失电时,使手术器械不掉落。
4.为此,本实用新型提供了一种滑台制动机构,包括滑台、电磁铁、电机、滚珠丝杆、异型螺母,所述滑台为内部中空的柱状结构,所述电磁铁、所述电机、所述滚珠丝杆及所述异型螺母均设置在所述滑台的内部,所述电磁铁和所述电机均与所述滑台内表面连接,所述电机与所述滚珠丝杆驱动连接,所述异型螺母套设在所述滚珠丝杆上,所述异型螺母与所述滚珠丝杆的螺母座上表面抵接,且用于与所述滚珠丝杆转动连接,所述异型螺母上表面用于与手术器械连接,所述电磁铁上设有推杆,所述推杆上套设有滑块,所述推杆用于在电磁作用力的驱动下上下移动,以使所述滑块能够抵达所述异型螺母的转动路径。
5.可选地,所述异型螺母侧面连接有限位机构,所述滑块用于与所述限位机构抵接。
6.可选地,滑台制动机构还包括滑块座,所述滑块座的一端与所述电磁铁连接,所述滑块座的另一端与所述滑台连接。
7.可选地,滑台制动机构还包括压簧,所述滑块座包括相互连接的连接部与第一套设部,所述连接部与所述滑台连接,所述套设部套设在所述推杆周侧,所述套设部位于所述滑块上方,所述压簧套设在所述推杆周侧,所述压簧的一端与所述套设部抵接,所述压簧的另一端与所述滑块抵接。
8.可选地,所述滑块包括相互连接的第二套设部和连接块,所述第二套设部套设在所述推杆周侧,且位于所述第一套设部下方,所述连接块位于所述第一套设部外侧,朝向带动异型螺母的一端,所述连接块用于与所述异型螺母抵接。
9.可选地,滑台制动机构还包括导管,所述导管套设在所述推杆上,所述第一套设部和所述第二套设部均套设在所述导管上。
10.可选地,滑台制动机构还包括滑动套,所述滑动套套设在所述导管上,所述第二套设部套设在所述滑动套上。
11.可选地,滑台制动机构还包括联轴器,所述联轴器的一端与所述电机连接,所述联轴器的另一端与所述滚珠丝杆连接。
12.可选地,滑台制动机构还包括过线板,所述过线板与所述滑台的内表面连接。
13.与现有技术相比,本实用新型所述的滑台制动机构的有益效果是:
14.本实用新型通过设置滑台、电机及电磁铁,滑台为中空的柱状结构,使电机与电磁铁可连接在滑台内侧,且连接处固定,滚珠丝杆和异型螺母也设置在滑台内部,电机与滚珠丝杆驱动连接,电机转动可带动滚珠丝杆转动,异型螺母套设在滚珠丝杆上,异型螺母设置在滚珠丝杆的螺母座上方,滚珠丝杆转动时,螺母座可带动异型螺母上下移动,且异型螺母在上下移动时相对滚珠丝杆的丝杆转动,异型螺母上端与手术器械连接,进而带动手术器械上下移动,满足手术需要,电磁铁上设有推杆,推杆上套设有滑块,电磁铁得电时,推杆伸长,带动滑块向上移动,此时,滑块位于异形螺母上方,滑块不影响异型螺母在转动的同时上下移动,当失电时,电机失电无法驱动滚珠丝杆转动,无法控制手术器械移动,此时异型螺母在手术器械的重力作用下有沿滚珠丝杆向下转动的趋势,手术器械与异型螺母的上端连接,进而使手术器械有随异型螺母一同向下移动的运动趋势,电磁铁失电,推杆在重力作用下缩短,滑块向下移动,滑块下落后可位于异型螺母的转动路径上,滑块可挡住异型螺母,阻止异型螺母转动,异型螺母无法转动,使手术器械不会掉落。
15.此外,为了解决上述问题,本实用新型还提供了一种腹腔镜手术机器人,包括上述的滑台制动机构。
16.与现有技术相比,本实用新型所述的腹腔镜手术机器人的有益效果和上述滑台制动机构的有益效果大致相同,在此不再赘述。
附图说明
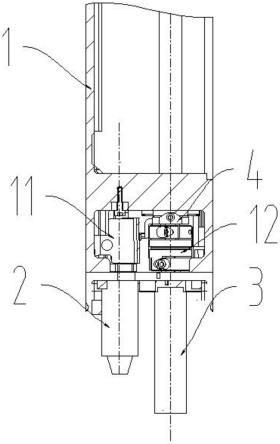
17.图1为本实用新型实施例所述的滑台制动机构的结构示意图之一;
18.图2为本实用新型实施例所述的滑台制动机构的结构示意图之二;
19.图3为本实用新型实施例所述的电磁铁的结构示意图;
20.图4为本实用新型实施例所述的异型螺母的结构示意图。
21.附图标记说明:
22.1-滑台;2-电磁铁;3-电机;4-异型螺母;41-限位机构;5-推杆;6-滑块;61-第二套设部;62-连接块;7-滑块座;71-连接部;72-第一套设部;8-压簧;9-导管;10-滑动套;11-过线板;12-联轴器。
具体实施方式
23.为使本实用新型的上述目的、特征和优点能够更为明显易懂,下面结合附图对本实用新型的具体实施例做详细的说明。
24.需要说明的是,在本公开的描述中,采用了“上”、“下”、“左”、“右”、“顶”、“底”、“前”、“后”、“内”和“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本公开,而不是指示或暗示所指的装置必须具有特定的方位、以特定的方位构造和操控,因此不能理解为对本公开保护范围的限制。
25.术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。
26.而且,虽然在本公开中参照了特定的实施例来描述本实用新型,但是应该理解的是,这些实施例仅仅是本实用新型的原理和应用的示例。因此应该
27.理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布5置,只要不偏离所附权利要求所限定的本实用新型的精神和范围。应该理解的是,可以通过不用于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他所述实施例中。
28.为解决上述问题,如图1和图2所示,本实用新型提供一种滑台制动机0构,包括滑台1、电磁铁2、电机3、滚珠丝杆、异型螺母4,所述滑台1为
29.内部中空的柱状结构,所述电磁铁2、所述电机3、所述滚珠丝杆及所述异型螺母4均设置在所述滑台1的内部,所述电磁铁2和所述电机3均与所述滑台1内表面连接,所述电机3与所述滚珠丝杆驱动连接,所述异型螺母4套
30.设在所述滚珠丝杆上,所述异型螺母4与所述滚珠丝杆的螺母座上表面抵接,5且用于与所述滚珠丝杆转动连接,所述异型螺母4上表面用于与手术器械连接,所述电磁铁2上设有推杆5,所述推杆5上套设有滑块6,所述推杆5用于在电磁作用力的驱动下上下移动,以使所述滑块6能够抵达所述异型螺母4的转动路径。
31.在本实施例中,通过设置滑台1、电机3及电磁铁2,滑台1为中空的柱0状结构,使电机3与电磁铁2可连接在滑台1内侧,且连接处固定,滚珠丝杆和异型螺母4也设置在滑台1内部,电机3与滚珠丝杆驱动连接,电机3转动可带动滚珠丝杆转动,异型螺母4套设在滚珠丝杆上,异型螺母4设置在滚珠丝杆的螺母座上方,滚珠丝杆转动时,螺母座可带动异型螺母4上下
32.移动,且异型螺母4在上下移动时相对滚珠丝杆的丝杆转动,异型螺母4上5端与手术器械连接,进而带动手术器械上下移动,满足手术需要,电磁铁2上设有推杆5,推杆5上套设有滑块6,电磁铁2得电时,推杆5伸长,带动滑块6向上移动,此时,滑块6位于异形螺母上方,滑块6不影响异型螺母4在转动的同时上下移动,当失电时,电机3失电无法驱动滚珠丝杆转动,无法控制手术器械移动,此时异型螺母4在手术器械的重力作用下有沿滚珠丝杆向下转动的趋势,手术器械与异型螺母4的上端连接,进而使手术器械有随异型螺母4一同向下移动的运动趋势,电磁铁2失电,推杆5在重力作用下缩短,滑块6向下移动,滑块6下落后可位于异型螺母4的转动路径上,滑块6可挡住异型螺母4,阻止异型螺母4转动,异型螺母4无法转动,使手术器械不会掉落。
33.具体地,异型螺母4的螺纹孔可与滚珠丝杆的螺母配合使用,滚珠丝杆的螺母座在推动异型螺母4上下移动时,异型螺母4在螺纹的配合下同时转动,推杆5的下部设有推柄,推柄可与滑块6连接,推动滑块6向上移动。
34.可选地,如图2和图4所示,所述异型螺母4侧面连接有限位机构41,所述滑块6用于与所述限位机构41抵接。
35.在本实施例中,通过在异型螺母4的侧面设置限位机构41,限位机构41可为把手状结构,限位机构41可与异型螺母4一体化设置,异型螺母4在转动的同时上下移动时,限位机构41也随之在转动的同时上下移动,在失电时,电磁铁2失电,推杆5在重力作用下缩短,滑块6向下移动,滑块6位于异型螺母4的转动路径上,滑块6可挡住限位机构41,阻止异型螺母4转动,限位机构41相对异型螺母4更加突出,更容易被滑块6阻挡,异型螺母4无法转动,使
手术器械不会掉落。
36.可选地,如图3所示,滑台制动机构还包括滑块座7,所述滑块座7的一端与所述电磁铁2连接,所述滑块座7的另一端与所述滑台1连接。
37.在本实施例中,通过设置滑块座7,滑块座7的一端与电磁铁2连接,另一端与滑台1连接,连接方式可采用螺钉连接,将电磁铁2固定在滑台1上,电磁铁2得电时,电磁铁2以滑台1为基准,驱动推杆5相对滑台1向上移动,设置滑块座7,使电磁铁2与滑台1的连接更牢固。
38.可选地,如图3所示,滑台制动机构还包括压簧8,所述滑块座7包括相互连接的连接部71与第一套设部72,所述连接部71与所述滑台1连接,所述套设部套设在所述推杆5周侧,所述套设部位于所述滑块6上方,所述压簧8套设在所述推杆5周侧,所述压簧8的一端与所述套设部抵接,所述压簧8的另一端与所述滑块6抵接。
39.在本实施例中,通过将滑块座7设置为连接部71与第一套设部72两部分,连接部71用于将电磁铁2固定在滑台1上,第一套设部72为设有贯穿孔的筒状结构,第一套设部72套设在推杆5周侧,且第一套设部72位于滑块6的上方,在第一套设部72与滑块6之间设置压簧8,压簧8套设在推杆5周侧,当电磁铁2得电时,推杆5向上移动,推动滑块6向上移动,为第一套设部72不动,使压簧8压缩,在电磁铁2失电时,推杆5给滑块6和压簧8的推力消失,压簧8的弹力的作用下伸长,以第一套设部72为急基准,驱动滑块6和推杆5向下移动,便于滑块6和推杆5向下移动,使滑块6位于异型螺母4的转动路径上,滑块6可挡住异型螺母4,阻止异型螺母4转动,异型螺母4无法转动,使手术器械不会掉落。
40.可选地,如图3所示,所述滑块6包括相互连接的第二套设部61和连接块62,所述第二套设部61套设在所述推杆5周侧,且位于所述第一套设部72下方,所述连接块62位于所述第一套设部72外侧,朝向带动异型螺母4的一端,所述连接块62用于与所述异型螺母4抵接。
41.在本实施例中,通过将滑块6设置为第二套设部61和连接块62两部分,第二套设部61设有贯穿孔,用于套设在推杆5上,压簧8与第二套设部61连接,连接块62位于第二套设部61朝向异型螺母4的一侧,电磁铁2失电时,压簧8以第一套设部72为基准,推动第二套设部61向下移动,连接块62随之向下移动,使连接块62位于异型螺母4的转动路径上,连接块62可挡住异型螺母4,阻止异型螺母4转动,异型螺母4无法转动,使手术器械不会掉落。
42.可选地,如图3所示,滑台制动机构还包括导管9,所述导管9套设在所述推杆5上,所述第一套设部72和所述第二套设部61均套设在所述导管9上。
43.在本实施例中,通过设置导管9,导管9套设在推杆5上,第一套设部72和第二套设部61均套设在导管9上,导管9的下端设有凸台结构,凸台结构下表面与推柄连接,上表面与第二套设部61连接,凸台结构在水平方向的面积较大,便于推动滑块6向上移动,且导管9上部与第一套设部72连接,下部与第二套设部61连接,可起到导向定位作用,保证第二套设部61始终相对第一套设部72沿同一路径运动,防止第一套设部72与第二套设部61产生偏斜,压簧8因偏斜被卡住,无法驱动第二套设部61向下运动。
44.可选地,如图3所示,滑台制动机构还包括滑动套10,所述滑动套10套设在所述导管9上,所述第二套设部61套设在所述滑动套10上。
45.在本实施例中,通过设置滑动套10,滑动套10套设在导管9上,第二套设部61套设在导管9上,滑动套10可减小第二套设部61与导管9之间的摩擦力,便于滑块6的上下滑动。
46.可选地,如图1所示,滑台制动机构还包括联轴器12,所述联轴器12的一端与所述电机3连接,所述联轴器12的另一端与所述滚珠丝杆连接。
47.在本实施例中,通过设置联轴器12,联轴器12的两端分别与电机3的驱动端及滚珠丝杆连接,可减小摩擦力,起到缓冲作用,便于电机3驱动滚珠丝杆转动。
48.可选地,如图1所示,滑台制动机构还包括过线板11,所述过线板11与所述滑台1的内表面连接。
49.在本实施例中,为保证腹腔镜手术机器人的正常工作,滑台1中设有线束,在滑台1内设置过线板11,可将线束设置在过线板11内侧,规范线束的走线路径,使线束远离滑台1、异型螺母4,防止线束与滑台1、异型螺母4相互影响,干扰手术器械正常使用。
50.本实用新型另一实施例的一种腹腔镜手术机器人包括上述的滑台制动机构。
51.与现有技术相比,本实施例的腹腔镜手术机器人的有益效果和上述滑台制动机构的有益效果大致相同,在此不再赘述。
52.虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1