基于自适应偏置和速度观测器的磁悬浮转子振动控制方法
本发明涉及磁轴承转子振动控制,具体涉及基于自适应偏置和速度观测器的磁悬浮转子振动控制方法。
背景技术:
1、主动电磁轴承(active magnetic bearing, amb)具有无磨损、寿命长、维护成本低、可运行转速高等传统永磁轴承无法比拟的优点,广泛应用于飞轮储能、压缩机、卫星姿态调整等领域。传统主动电磁轴承常采用差动控制方式,即在同一个自由度上有两个对置的磁铁在同时工作,这两个电磁铁的恒定偏置电流相同,控制电流大小相等,方向相反,控制电流大小与转子振动和控制策略有关。偏置电流与控制电流进行差分运算后再分别驱动两个电磁线圈,产生差动磁场。
2、这种差动布局使得正向力和负向力都能产生,有利于改善电磁轴承系统的动态性能。由于恒定偏置电流的存在,即便是控制电流为零时电磁轴承也存在一定电能损耗,并导致冗余功耗和系统发热。为减小偏置电流产生的电能损耗,国内外学者提出零偏置电流控制方法和变偏置电流控制方法。零偏置电流方式能显著减小气隙中磁感应强度和相关损耗,但系统的动态性能差,扰动抑制能力弱。变偏置电流方式能提供足够的刚度和阻尼,使转子在较高转速下运动,但是其在某个转速下瞬间切换偏置电流,会造成转子振荡,影响系统稳定运行。
技术实现思路
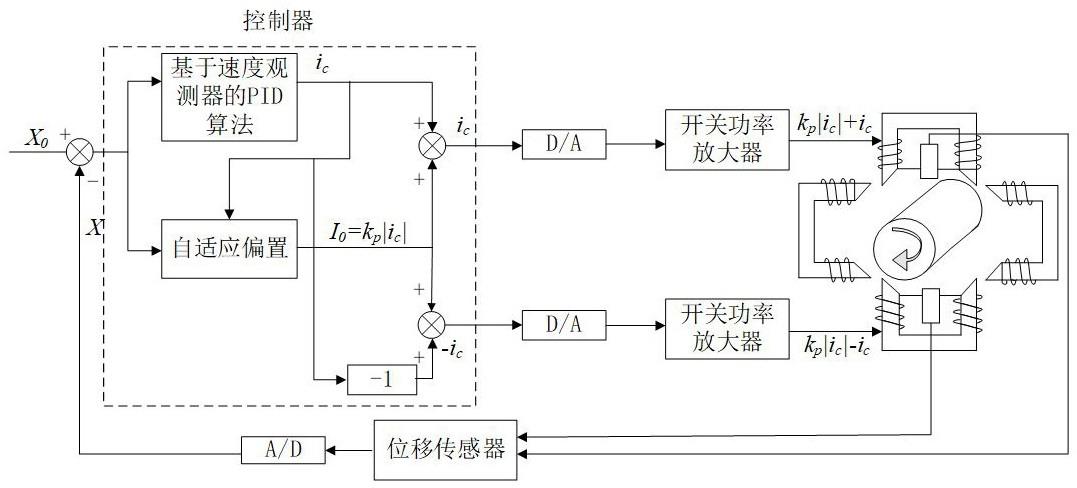
1、针对上述现有技术的不足,本文提出了基于自适应偏置和速度观测器的磁悬浮转子振动控制方法,该控制方法主要包含基于速度观测器的pid算法和自适应偏置算法两个子模块,在基于速度观测器的pid算法中,采用速度观测器取代传统pid算法中的微分环节,增强了系统的抗噪声干扰能力;在自适应偏置算法中,根据由转子基频振幅和基于速度观测器的pid输出共同决定偏置电流的大小,偏置电流随基于速度观测器的pid输出的改变而变化,再将偏置电流与基于速度观测器的pid输出进行差分运算,得到电磁轴承线圈的驱动电流,进而产生电磁力,保证转子稳定悬浮在指定位置。仿真结果表明,本发明提出的控制方法具有磁轴承线圈驱动电流小,发热少,可有效节约电能,且抗噪声干扰能力强的特点。
2、本发明提供的基于自适应偏置和速度观测器的磁悬浮转子振动控制方法,具体包括以下步骤:
3、s1建立基于速度观测器的pid算法模块,借助基于速度观测器的pid算法模块得到控制电流 ic;
4、s2自适应偏置算法模块根据基于速度观测器的pid算法输出的控制电流 ic产生自适应偏置电流 i0;
5、s3基于自适应偏置和速度观测器的磁悬浮转子振动控制方法,将偏置电流 i0与控制电流 ic进行差分运算,得到驱动控制信号,并通过功率放大器将驱动控制信号转化为电磁轴承的驱动电流;
6、s4建立主动磁轴承电磁力非线性化数学模型,得到电磁力与控制电流和偏置电流之间的数学表达式;电磁力模型根据驱动电流得出磁轴承的输出电磁力,在电磁轴承中产生控制电磁力,使飞轮转子保持稳定悬浮。
7、进一步地,步骤s1中基于速度观测器的pid算法模块主要包括:
8、(1)比例环节:主要调节系统的响应速度。一旦产生偏差,控制器响应,产生控制作用减小偏差。增大比例增益k,可提高系统的响应速度,反之减小比例增益k,会降低系统的响应速度。
9、(2)积分环节:主要影响系统的稳态精度,用于消除静差。积分系数i越大积分作用越弱,积分系数i越小积分作用越强。
10、(3)微分环节:主要影响系统的动态性能。能对信号的变化趋势进行预测,并及时地对控制对象输入调整信号,可以有效减小超调量,缩短调整时间。微分系数d越大微分作用越强,微分系数d越小微分作用就越弱。
11、进一步地,步骤s1中,速度观测器具体的速度观测算法如下:
12、,
13、式中, r为预设的位置信号, x1 (t)和 x2 (t)分别为观测器观测到的位移信号和速度信号,表示对位移信号的求导,表示对速度信号的求导, r, α 0 ,α 1 ,α 2 ,m a ,n为观测器参数, r>0, α 0 ,α 1 ,α 2>0,以及 m a和 n都为正奇数,且 m a> n。
14、进一步地,步骤s2中,自适应偏置算法模块根据基于速度观测器的pid算法模块输出的控制电流 ic产生自适应偏置电流 i0具体包括以下步骤:
15、s21.提取出主动电磁轴承在 x, y方向上运动时的基频振动信号的振幅,
16、主动电磁轴承 x方向的基频振动信号的振幅 ax可表示为:
17、,
18、式中 ax ,bx是转子在 x方向振动的傅里叶系数, x a (kt)为当前电磁轴承 x端的振动信号, k为采样周期数, t为采样周期, n为采样个数;
19、同理,主动电磁轴承 y方向的基频振动信号的振幅 ay可表示为:
20、,
21、式中 ay ,by是转子在 y方向振动的傅里叶系数, y a (kt)为当前电磁轴承 y端的振动信号, k为采样周期数, t为采样周期, n为采样个数;
22、因此,主动电磁轴承转子系统的振幅指数可表示为:
23、,
24、 e x为主动电磁轴承转子系统的振幅指数,该值可表示当前转子振动的程度;
25、s22.通过当前时刻主动电磁轴承转子系统的振幅指数 e x,计算获得自适应偏置系数 kp
26、,
27、其中 ex为主动电磁轴承转子振幅指数,c0为电磁轴承定转子标称气隙;
28、s23.结合步骤s1获得的控制电流 ic计算出偏置电流 i0
29、。
30、进一步地,步骤s3中,将偏置电流 i0与控制电流 ic进行差分运算,得到驱动控制信号,并通过功率放大器将驱动控制信号转化为电磁轴承的驱动电流的具体方式为:
31、,
32、式中, i1 ,i2分别为同一电磁轴承同一方向上对置的两块电磁铁线圈的驱动电流, ic为对应电磁铁线圈的控制电流, kp为自适应偏置系数。
33、进一步地,步骤s4中,主动电磁轴承amb采用非线性化模型,电磁轴承电磁力模型为:
34、,
35、其中, kxa, kxb, kya, kyb为4自由度电磁力系数, ixa1, ixa2. iya1, iya2是电磁轴承a中 x,y方向上四个电磁铁线圈的驱动电流, ixb1, ixb2, iyb1, iyb2是电磁轴承b中 x,y方向上四个电磁铁线圈的驱动电流, xba, yba是 x,y方向上转子向电磁轴承a移动的距离, xbb, ybb是 x,y方向上转子向电磁轴承b移动的距离, c0为平均气隙。
36、本发明的有益效果:
37、与现有技术相比,本发明提出的改进型pid削弱了高频噪声对系统稳定性的影响,能够有效的抑制噪声干扰。采用本发明的自适应偏置控制方法时输出信号的噪声与采用传统控制方法相比减小50%。本发明提供的自适应偏置控制方式的线圈驱动电流远小于传统控制方式,能够有效节约电能,降低电磁轴承的损耗;采用本方法能够用尽可能小的控制电流使磁悬浮转子系统工作在稳定的运行状态,适用于低转速,稳定运行的工作环境。
- 还没有人留言评论。精彩留言会获得点赞!