用于建筑结构的智能三维扫描测绘设备的制作方法
本发明涉及三维扫描测绘设备的,具体为一种用于建筑结构的智能三维扫描测绘设备。
背景技术:
1、三维激光扫描技术的特点作为一种新的测量手段,三维激光扫描测绘技术不传统的测量方法相比有如下优点:扫描速度快,地面三维激光扫描仪可在短时间内获取空间目标的二维信息,非接触式工作,扫描仪发射激光束在测量目标自动反射,实现了危险目标、厂可达目标的测量,数据信息丰富,可以在冲行空间三维坐标测量的同时,获取目标表面的激光强度信号和真彩色信息,为目标的识别和分类提供了更多途径,主动性工作自动发射测量信号,开需要外部光源配合,可在白天黑夜全天侯作业,提高了作业效率;高精度,地面激光扫描能以高精度的方式获取目标的表面特征,高密度,激光扫描同时能以高密度的方式获取目标表面细部特征,可量测,可以直接在点于上获取二维坐标、距离、方位角、表面法向量,还可以计算得到点于所表达目标的表面积、体积等。
2、三维扫描测绘的使用场景较为广泛,在工厂,房屋,空地等使用环境中,我们需要对所需要的空间进行测量从而得出相应数据,在使用前需要对设备进行组装,虽然现在多数的采集设备组装较为快速,但存在与所需测量的空间体积过大,需要在不同角度与位置进行测量,每一个测量点需要对设备进行拆卸后再次安装,较为繁琐,且影响测量效率,其次,在进行测量过程中,需要实现对于设备的稳定性,虽然现在的支架多为三角架,具有一定的稳定性,但是缺乏保护性,可能会存在与外界接触从而倾倒的可能,且虽然三维测绘设备为智能化设备,但与其配备的组件并不具备智能化功能,因此,设备整体相对智能化程度较低,因此,我们急需一种用于建筑结构的智能三维扫描测绘设备来解决上述问题。
技术实现思路
1、本发明的发明目的在于提供了一种用于建筑结构的智能三维扫描测绘设备,该用于建筑结构的智能三维扫描测绘设备,提供了稳定性的同时,避免多次拆卸安装而造成工作量加大,避免影响工作效率,提高了设备整体的智能化运作。
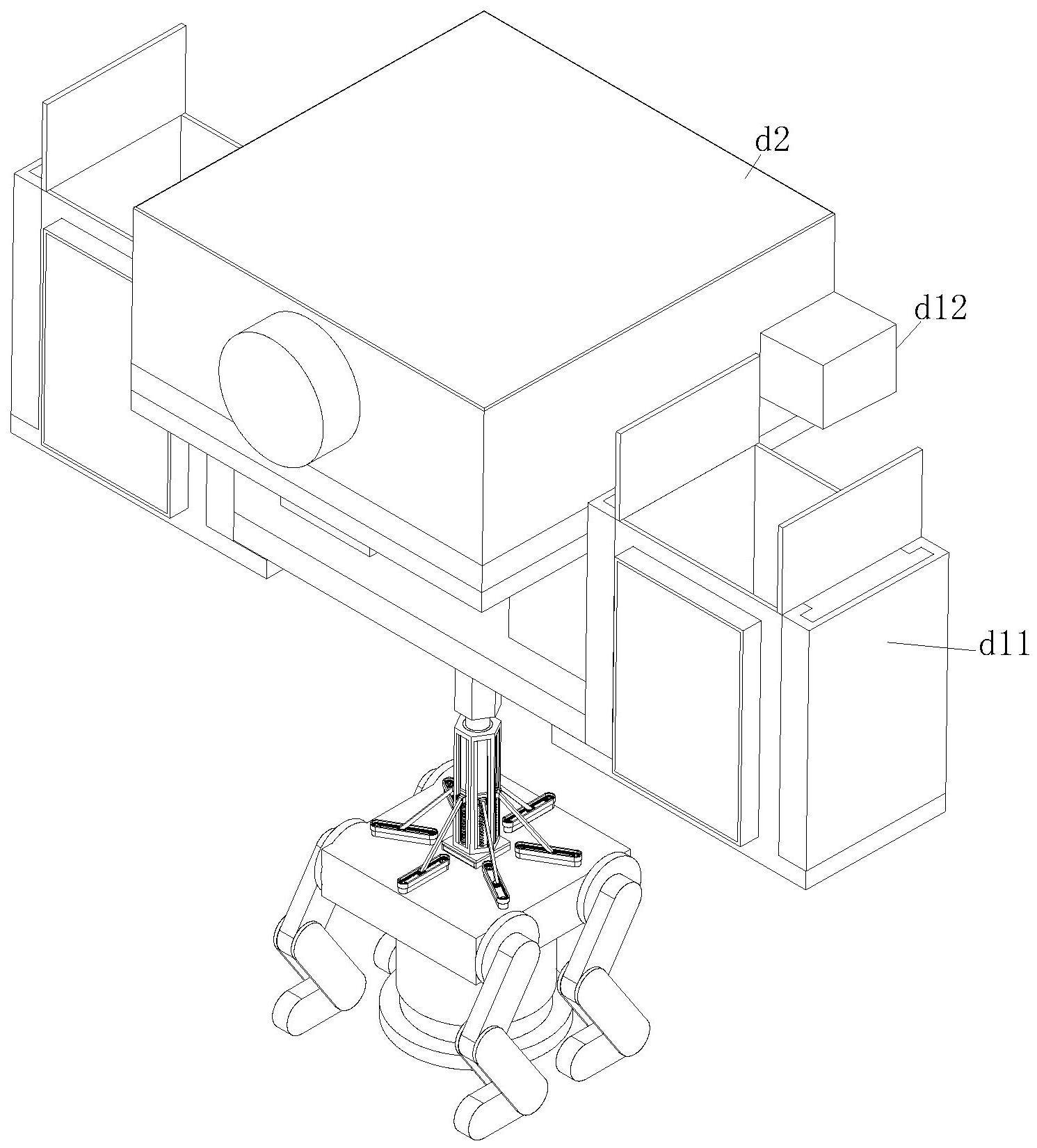
2、为实现以上目的,本发明通过以下技术方案予以实现:一种用于建筑结构的智能三维扫描测绘设备,包括智能驱动底座,所述智能驱动底座内设置有移动支撑转向组件,所述移动支撑转向组件包括支撑腿,所述支撑腿设置在智能驱动底座左右两侧的前后两侧,并通过电机驱动,所述智能驱动底座的下表面固定安装有转动液压杆,且转动液压杆的输出端固定安装有底板;
3、所述智能驱动底座上还包括夹持组件、支撑组件、放置组件;
4、所述放置组件内包括三维扫描测绘器。
5、通过上述技术方案,智能驱动底座为遥控机器人本体,通过无线信号传输并接受信号,传递信号给操作人员手中的总控制器并驱动电机对支撑腿,从而进行前行后退,转动液压杆为具有电机驱动的转向液压杆,当需要进行转向是,转动液压杆的输出端向下延伸并通过底板与地面接触,并通过电机驱动对设备本体进行角度移动后,转动液压杆复位,转动液压杆还具备在设备安放位置固定后,实现稳定效果,采用机器人对设备进行移动,从而避免移动位置时对其的拆卸工作,节省了拆卸时间,提高了设备整体的智能化。
6、优选的,所述夹持组件内包括矩形空腔,所述矩形空腔开设在智能驱动底座上表面的中心位置,所述矩形空腔的左右两侧内壁均开设有限位槽,所述矩形空腔内设置有矩形杆,所述矩形杆内的左右均开设有]形腔,两个所述]形腔的相背内壁均固定安装有液压杆,且液压杆的输出端均固定安装有]形板,且]形板的下端与限位槽接触。
7、通过上述技术方案,通过设置有两个]形空腔,并通过两个]形板与液压杆的配合,从而实现了当按压]形板上端后,]形板完全收缩在]形腔内,将矩形杆插接在所开设的矩形空腔内后,松开对于]形板的按压,从而实现对于设备的快速安装,提高了对于设备的安装效率与稳定性。
8、优选的,所述矩形杆的上端固定安装有六角杆一,所述支撑组件设置在六角杆一与智能驱动底座上,所述六角杆一的六个侧面均开设有长形槽,六个所述长形槽内均固定安装有滑行轨道,且滑行轨道内均滑动连接有滑块,六个所述滑块且远离六角杆一的一侧固定安装有转动轴,且转动轴上固定安装有支撑杆的一端,所述长形槽的内底壁均固定安装有弹簧的底端,且弹簧的顶端与滑块固定安装,所述智能驱动底座的上表面且对应六角杆一六面位置均开设有放置槽。
9、优选的,所述放置槽内固定安装有挡板,所述挡板内且位于智能驱动底座的上表面设置有皮带,所述皮带的一端内设置有齿轮一,所述皮带的另一端设置有齿轮二,所述智能驱动底座的上表面且位于齿轮一的一端开设有轴承孔一,所述轴承孔一内轴承连接有轴承杆一,且轴承杆一与齿轮一转动连接,所述智能驱动底座的上表面位于齿轮二位置开设有轴承孔二。
10、优选的,所述轴承孔二的内底壁固定安装液压推动杆,且液压推动杆的输出端固定安装有轴承座,所述轴承座内通过轴承转动连接有轴承杆二的底端,所述轴承杆二的顶端固定安装有限位杆,所述齿轮二的内壁与轴承杆二上均通过螺纹啮合,所述皮带内环固定安装有轮齿,且轮齿与齿轮一与齿轮二啮合,所述皮带内还通过轮齿啮合有齿轮三,所述轮齿横置中心线位置固定安装有隔板,所述齿轮三的下表面与隔板上表面接触。
11、优选的,所述齿轮三的上表面固定安装有圆形滑轨,所述圆形滑轨内均滑动连接有弧形滑块,所述支撑杆的另一端固定连接有圆形盖板,且圆形盖板的下表面与弧形滑块的上表面固定安装,所述齿轮三的中心位置开设有限位孔,所述六角杆一内开设有六角槽,且六角槽内固定安装有抬升杆,且抬升杆的输出端固定安装有六角杆二的底端,所述六角杆杆二的顶端固定安装有横板。
12、通过上述技术方案,皮带所起到驱动作用,且通过齿轮一与齿轮二进行转动驱动,滑行轨道为电控轨道,通过无线信号驱动,当滑行轨道带动滑块向下移动后,齿轮三通过皮带上轮齿向外侧移动,当移动至齿轮二上方后,因皮带移动并带动齿轮二转动,限位杆通过螺纹传送向上移动并对齿轮三进行限位,从而完成支撑,当需要接触限位时,逆时针旋转齿轮二将限位杆向下移动,当螺纹脱离后,通过液压推动杆进行复位,从而可以提高设备的安装的稳定性,齿轮三可以对向下移动后,并缓慢与轮齿啮合,且齿轮三高于齿轮一与齿轮二。
13、优选的,所述放置组件设置在横板上,所述横板上表面的左右两侧均固定安装有液压推杆,且液压推杆的输出端均固定安装有方形板,所述方形板的下表面固定安装有电机,且电机的输出端通过联轴器转动连接有传动杆的底端,且传动杆的顶端向上延伸并固定安装有磁吸板,且磁吸板与方形板上表面接触,所述三维扫描测绘器的下表面固定安装有安装板,所述安装板吸附在磁吸板上。
14、通过上述技术方案,磁吸板采用正极磁铁,且磁吸板的磁吸位置为上端,并不与电机输出端所带动传动杆接触,磁吸板采用好处可以更为便捷的对三维测绘器进行安装,安装板内采用负极磁铁,从而可以实现对其的相互吸引,且磁吸强度较高,从而提高了设备安装的便捷性与稳定性。
15、优选的,所述横板下表面的左右两侧均固定安装有支架,所述支架上表面的左右两侧均固定安装有滑动插板,所述滑动插板内插接有存放箱,所述存放箱内存放有测绘无人机,所述存放箱的前侧设置有参数控制面板。
16、通过上述技术方案,在常规测绘过程中,因测绘场地面积过大,往往会存在有死角的可能性,如果在设备整体上加上测绘无人机,并通过参数控制面板对测绘无人机的定位标点进行设置,从而锁定两个可能存在死角的点,并将信号进行传输至三维扫描测绘器内,从而可以快速的对测绘场地大概进行初步测绘,从而提高了智能化的同时,加速了整体的测绘效率。
17、优选的,所述三维扫描测绘器上固定安装有信号箱,所述信号箱设置有中央处理器、信号传输器、信号接收器、所述智能驱动底座上固定安装有信号接收器一,所述信号箱内电子元件均电性连接,中央处理器还与设备元件通过无线信号电性连接。
18、通过上述技术方案,通过添加信号箱,从而可以加速对于设备整体运行的控制,例如抬升,固定,转动角度等操作,从而提高智能化。
19、通过采用前述技术方案,本发明的有益效果是:
20、1、该用于建筑结构的智能三维扫描测绘设备,通过智能驱动底座、信号箱与测绘无人机的设置,提高了设备整体的智能化设计,从而可以在原有且较为单一的基础上,添加了角度移动,死角消除,智能移动、抬升、稳固等功能,大大的提高了设备在使用过程中的便捷性,还避免了需要对其位置移动而需要拆卸后再次安装的情况,提高了工作效率,加强了设备完整智能化程度。
21、2、该用于建筑结构的智能三维扫描测绘设备,通过移动支撑转向组件内支撑腿与转动液压杆的配合,可以更好的为设备安放提供稳定效果,通过支撑腿可以进行微小角度调整,并通过转动液压杆对地面的支撑,从而保证在设备使用时,保持正角度测绘。
- 还没有人留言评论。精彩留言会获得点赞!