一种转轴机构以及电子设备的制作方法
本技术涉及电子设备,尤其涉及到一种转轴机构以及电子设备。
背景技术:
1、随着柔性显示屏技术的逐渐成熟,电子设备的显示方式发生了非常大的变化,可折叠柔性屏手机、可折叠柔性屏平板电脑,以及具有可折叠柔性屏的可穿戴电子设备等是未来智能电子设备的一大重要演进方向。
2、为了同时满足用户对可折叠电子设备的大显示画面需求和便携需求,三折折叠机逐渐应用于人们的日常生活中。在一种三折折叠机中,该折叠机包括柔性显示屏、第一转轴机构和第二转轴机构。柔性显示屏包括第一显示部、第二显示部和第三显示部,其中,第二显示部位于第一显示部和第三显示部之间。第一显示部可通过第一转轴机构相对于第二显示部展开或折叠,第三显示部可通过第二转轴机构相对于第二显示部展开或折叠。并且,当该三折折叠机处于折叠状态时,第一显示部和第三显示部按顺序叠置于第二显示部的同一侧。然而,在折叠时,用户可能按错误的顺序折叠第一显示部和第三显示部,这会损坏柔性显示屏。
技术实现思路
1、本技术提供了一种转轴机构以及电子设备,以实现电子设备的联动折叠。
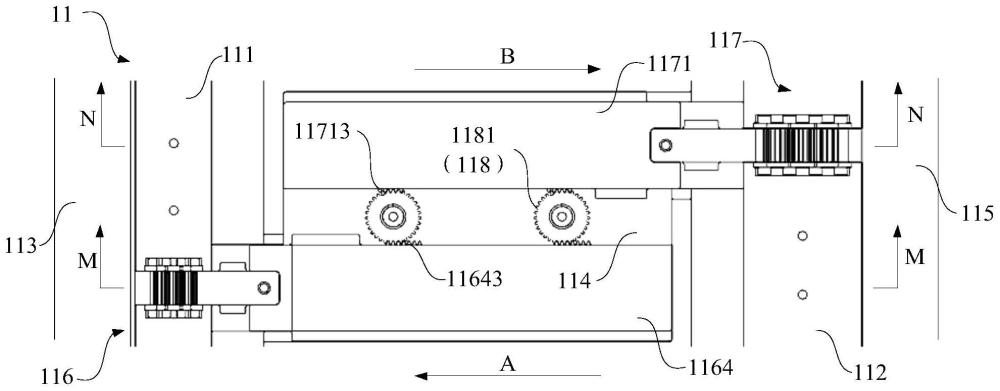
2、第一方面,本技术提供了一种转轴机构。转轴机构具体可以包括第一基座、第二基座、第一壳体固定架、第二壳体固定架、第三壳体固定架、第一转动机构、第二转动机构和联动齿轮件。具体的,第一基座和第二基座平行设置。第二壳体固定架转动连接于第一基座与第二基座之间,第一壳体固定架转动连接于第一基座背离第二壳体固定架的一侧,第三壳体固定架转动连接于第二基座背离第二壳体固定架的一侧。第一转动机构具体可以包括第一转动齿轮、第二转动齿轮、第一齿轮连杆和第二齿轮连杆。第一转动齿轮和第二转动齿轮啮合,并且第一转动齿轮和第二转动齿轮分别与第一基座转动连接,第二转动齿轮位于第一转动齿轮背离第一壳体固定架的一侧。第一齿轮连杆的一端与第一转动齿轮啮合,另一端与第一壳体固定架滑动连接。第二齿轮连杆的一端与第二转动齿轮啮合,另一端与第二壳体固定架滑动连接。第二转动机构包括第三转动齿轮、第四转动齿轮、第三齿轮连杆和第四齿轮连杆。第三转动齿轮和第四转动齿轮啮合,并且第三转动齿轮和第四转动齿轮分别与第二基座转动联接,第四转动齿轮位于第三转动齿轮背离第二壳体固定架的一侧。第三齿轮连杆的一端与第三转动齿轮啮合,另一端与第二壳体固定架滑动连接。第四齿轮连杆的一端与第四转动齿轮啮合,另一端与第三壳体固定架滑动连接。第二齿轮连杆相对于第二壳体固定架的滑动轨迹与第三齿轮连杆相对于第二壳体固定架的滑动轨迹平行且不重合。联动齿轮件设置于第二壳体固定架,联动齿轮件位于第二齿轮连杆与第三齿轮连杆之间,并且第二齿轮连杆和第三齿轮连杆分别与联动齿轮件啮合传动。
3、本技术的转轴机构用于可折叠的电子设备。在折叠电子设备时,可以对第一壳体固定架或第三壳体固定架施加外力。当对第一壳体固定架施加外力时,第一壳体固定架向靠近第二壳体固定架的方向转动,使第一齿轮连杆相对于第一壳体固定架滑动,并且使第一转动齿轮、第二转动齿轮和第二齿轮连杆随第一齿轮连杆同步转动。在该同步转动的过程中,第二齿轮连杆可在第二壳体固定架沿远离第二基座的方向滑动,并且通过联动齿轮件带动第三齿轮连杆沿远离第一基座的方向滑动,从而带动第三转动齿轮、第四转动齿轮和第四齿轮连杆随第三齿轮连杆同步转动,以使第三齿轮连杆相对于第三壳体固定架滑动,进而使第三壳体固定架向靠近第二壳体固定架的方向转动。当对第三壳体固定架施加外力时,第三壳体固定架向靠近第二壳体固定架的方向转动,使第四齿轮连杆相对于第三壳体固定架滑动,并且使第四转动齿轮、第三转动齿轮和第三齿轮连杆同步转动。在该同步转动的过程中,第三齿轮连杆可在第二壳体固定架沿远离第一基座的方向滑动,并且通过联动齿轮件带动第二齿轮连杆沿远离第二基座的方向滑动,从而带动第二转动齿轮、第一转动齿轮和第一齿轮连杆随第二齿轮连杆同步转动,以使第一齿轮连杆相对于第一壳体固定架滑动,进而使第一壳体固定架向靠近第二壳体固定架的方向转动。因此,无论是先折叠第一壳体固定架后还是先折叠第三壳体固定架,联动齿轮件均可以实现第一壳体固定架和第三壳体固定架相对于第二壳体固定架转动的联动,从而实现电子设备的联动折叠。
4、在一些技术方案中,联动齿轮件可以实现联动功能。具体的,联动齿轮件可以包括至少一个第一联动齿轮。第一联动齿轮具有第一齿。第一联动齿轮使第二齿轮连杆和第三齿轮连杆在第二壳体固定架上的滑动距离相等。
5、在另外一些技术方案中,联动齿轮件可以同时实现联动功能和差速功能。具体的,联动齿轮件可以包括至少一个第二联动齿轮。第二联动齿轮朝向第二齿轮连杆的一侧设置有第二齿,第二联动齿轮朝向第三齿轮连杆的一侧设置有第三齿。当第二齿轮连杆和第三齿轮连杆在第二壳体固定架上滑动时,由于第二齿与第三齿不同,第二齿轮连杆在第二壳体固定架上的滑动距离与第三齿轮连杆在第二壳体固定架上的滑动距离不同,从而使第一壳体固定架绕第一基座的转动速度与第三壳体固定架绕第二基座的转动速度不同,实现第一壳体固定架和第三壳体固定架的差速转动。
6、为了实现上述第二齿与第三齿不同,具体可以包括第二齿和第三齿的齿数、模数、齿距、分度圆直径中的至少一者不同。
7、当联动齿轮件使第二齿轮连杆与第三齿轮连杆在第二壳体固定架上的滑动距离相等时,转轴机构还可以包括第一差速机构和第二差速机构。具体的,第一差速机构包括第一转轴、第一转动件和第二转动件。第一转轴设置于第一基座,第一转动件转动连接于第一壳体固定架与第一转轴之间,第二转动件转动连接于第二壳体固定架与第一转轴之间。第二差速机构包括第二转轴、第三转动件和第四转动件。第二转轴设置于第二基座,第三转动件转动连接于第二壳体固定架与第二转轴之间,第四转动件转动连接于第三壳体固定架与第二转轴之间。通过设置第一差速机构的转动半径与第二差速机构的转动半径不同,实现第一壳体固定架和第三壳体固定架的差速转动。
8、具体设置第一差速机构时,在一些技术方案中,第一转动件可以为第一连杆,第二转动件可以为第二连杆。或者,在另外一些技术方案中,第一转动件可以为第一弧臂,第一转轴靠近第一弧臂的一侧设置有第一弧形导向槽。第一弧臂可以容置于第一弧形导向槽,并且通过第一弧臂在第一弧形导向槽内滑动可以实现第一转动件与第一转轴的转动连接。相应的,第二转动件可以为第二弧臂,第一转轴靠近第二弧臂的一侧设置有第二弧形导向槽。第二弧臂可以容置于第二弧形导向槽,并且通过第二弧臂在第二弧形导向槽内滑动可以实现第二转动件与第一转轴的转动连接。
9、类似的,具体设置第二差速机构时,在一些技术方案中,第三转动件可以为第三连杆,第四转动件可以为第四连杆。或者,在另外一些技术方案中,第三转动件可以为第三弧臂,第二转轴靠近第三弧臂的一侧设置有第三弧形导向槽。第三弧臂可以容置于第三弧形导向槽,并且通过第三弧臂在第三弧形导向槽内滑动可以实现第三转动件与第二转轴的转动连接。第四转动件可以为第四弧臂,第二转轴靠近第四弧臂的一侧设置有第四弧形导向槽。第四弧臂可以容置于第四弧形导向槽,并且通过第四弧臂在第四弧形导向槽内滑动可以实现第四转动件与第二转轴的转动连接。
10、上述第二壳体固定架具有中间平面。为了将第一差速机构的转动半径与第二差速机构的转动半径设置成不同,具体的,当转轴机构处于展平状态时,沿第二壳体固定架的厚度方向,第一转动件的转动轴心与中间平面之间具有第一距离,第二转动件的转动轴心与中间平面之间具有第二距离,第一距离与第二距离相等;第三转动件的转动轴心与中间平面之间具有第三距离,第四转动件的转动轴心与中间平面之间具有第四距离,第三距离与第四距离相等,并且第一距离与第三距离不相等。此外,第一转轴绕第二壳体固定架的转动半径与第二转轴绕第二壳体固定架的转动半径也设置为不同。
11、在具体设置第一转动机构时,第一齿轮连杆可以包括固定连接的第一齿段和第一滑块。第一齿段与第一转动齿轮啮合。第一壳体固定架朝向第一齿轮连杆的一侧具有第一滑槽,第一滑块容置于第一滑槽,并且通过第一滑块在第一滑槽内滑动可以实现第一齿轮连杆与第一壳体固定架的滑动连接。相应的,第二齿轮连杆可以包括固定连接的第二齿段和第二滑块。第二齿段与第二转动齿轮啮合。第二壳体固定架朝向第二齿轮连杆的一侧具有第二滑槽,第二滑块容置于第二滑槽,并且通过第二滑块在第二滑槽内滑动可以实现第二齿轮连杆与第二壳体固定架的滑动连接。类似的,在具体设置第二转动机构时,第三齿轮连杆可以包括固定连接的第三齿段和第三滑块。第三齿段与第三转动齿轮啮合。第二壳体固定架朝向第三齿轮连杆的一侧具有第三滑槽,第三滑块容置于第三滑槽,并且通过第三滑块在第三滑槽内滑动可以实现第三齿轮连杆与第二壳体固定架的滑动连接。相应的,第四齿轮连杆可以包括固定连接的第四齿段和第四滑块。第四齿段与第四转动齿轮啮合。第三壳体固定架朝向第四齿轮连杆的一侧具有第四滑槽,第四滑块容置于第四滑槽,并且通过第四滑块在第四滑槽内滑动可以实现第四齿轮连杆与第三壳体固定架的滑动连接。
12、上述第二齿轮连杆朝向联动齿轮件的一侧可以设置有第一齿条,第一齿条与联动齿轮件啮合。类似的,第三齿轮连杆朝向联动齿轮件的一侧设置有第二齿条,第二齿条与联动齿轮件啮合。这样可以实现联动齿轮件与第二齿轮连杆和第三齿轮连杆传动连接。
13、第二方面,本技术提供了一种电子设备。电子设备包括柔性显示屏、第一壳体、第二壳体、第三壳体以上述第一方面的转轴机构。其中,第一壳体与第一壳体固定架固定连接,第二壳体与第二壳体固定架固定连接,第三壳体与第三壳体固定架固定连接。柔性显示屏连续覆盖于第一壳体、第二壳体、第三壳体和转轴机构,并分别与第一壳体、第二壳体和第三壳体固定连接。在折叠该电子设备时,无论是先折叠第一壳体后还是先折叠第三壳体,转轴机构可以实现第一壳体和第三壳体相对于第二壳体转动的联动,从而实现电子设备的联动折叠。
14、上述电子设备可以为内折式电子设备,第一转动机构绕第一基座转动的转动轴心位于第一基座朝向柔性显示屏的一侧,且第二转动机构绕第二基座的转动轴心位于第二基座朝向柔性显示屏的一侧。或者,上述电子设备可以为外折式电子设备,第一转动机构绕第一基座转动的转动轴心位于第一基座背离柔性显示屏的一侧,且第二转动机构绕第二基座的转动轴心位于第二基座背离柔性显示屏的一侧。或者,上述电子设备可以为z形折叠设备,第一转动机构绕第一基座转动的转动轴心位于第一基座朝向柔性显示屏的一侧,且第二转动机构绕第二基座的转动轴心位于第二基座背离柔性显示屏的一侧。
- 还没有人留言评论。精彩留言会获得点赞!