一端约束的柔性转轴自动抑振系统及其控制方法与流程
本公开涉及振动控制,尤其涉及一端约束的柔性转轴自动抑振系统及其控制方法、装置、存储介质和电子设备。
背景技术:
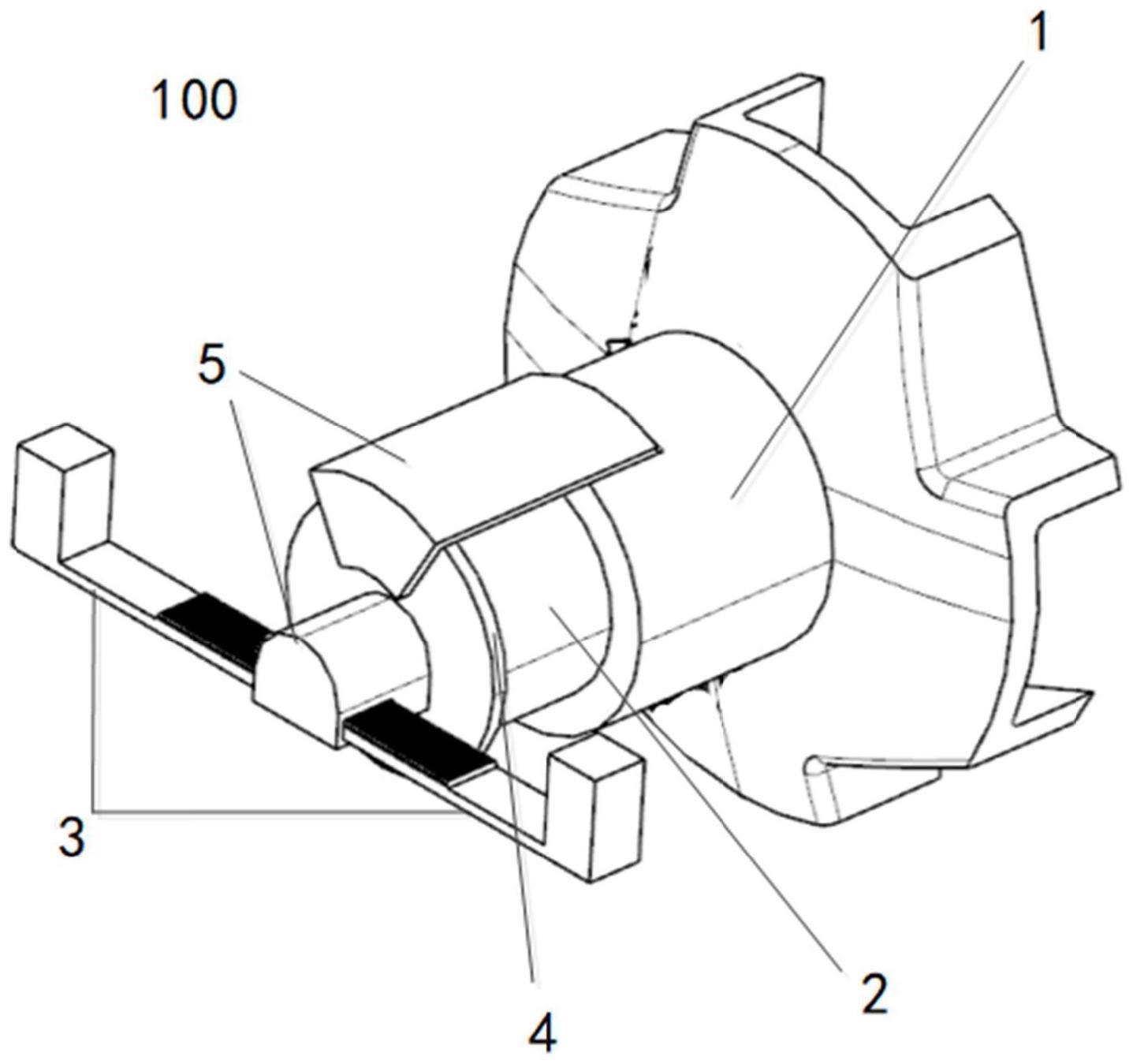
1、根据转子动力学的基本理论,动不平衡叶轮及其柔性转轴的实际运行过程中将会存在一般性的同步进动问题,如图1所示的一端约束的柔性转轴,尤其是现代高速风机的普及,越来越多的风机转速接近或者完全跨越转子的一阶临界转速,在临界转速附近运行的叶轮转子其同步进动将更易于激起其相应的模态进而导致更大的振动问题。
2、风机叶轮在量产装机之前都会进行动平衡修正以降低叶轮在装配运行状态下由于动不平衡而导致的振动问题,但是并不能使得叶轮获得完全的动平衡。即使对于低速叶轮转轴系统,由于其工作环境的特殊性,例如油烟环境,一段时间后由于油渍或者灰尘的附着也会导致转子原本的动平衡性能恶化,进而导致叶轮转子振动加剧。
技术实现思路
1、为了解决上述提出的至少一个技术问题,本公开提出了一端约束的柔性转轴自动抑振系统及其控制方法、装置、存储介质和电子设备。
2、根据本公开的一方面,提供了一端约束的柔性转轴自动抑振系统,其包括:
3、驱动电机、转轴电磁铁、平衡装置、调节盘、轴向调节装置和横向调节装置;
4、所述驱动电机用于驱动所述转轴电磁铁,所述横向调节装置和所述转轴电磁铁固定连接,所述调节盘与所述轴向调节装置固定连接,所述平衡装置和所述轴向调节装置滑动连接,所述平衡装置和所述横向调节装置部分连接;
5、在所述调节盘没有被吸附在所述转轴电磁铁上的情况下,通过所述驱动电机驱动所述横向调节装置,以使得所述横向调节装置带动所述平衡装置横向移动;
6、在所述调节盘被吸附在所述转轴电磁铁上的情况下,通过所述驱动电机驱动所述轴向调节装置,以使得所述轴向调节装置带动所述平衡装置轴向转动。
7、在一些可能的实施方式中,所述轴向调节装置包括传动箱,所述传动箱和所述调节盘固定连接,所述传动箱用于带动所述平衡装置转动。
8、在一些可能的实施方式中,所述横向调节装置包括固定模块,所述固定模块包括曲面体和平面体,所述曲面体和所述平面体的一侧固定连接,所述曲面体与所述驱动电机固定连接,所述调节盘设置在所述平面体和所述转轴电磁铁之间,所述调节盘与所述平面体吸附连接,或所述调节盘与所述转轴电磁铁吸附连接。
9、在一些可能的实施方式中,所述横向调节装置还包括传动轴,所述传动轴和所述转轴电磁铁固定连接,所述转轴电磁铁还用于带动所述传动轴转动。
10、在一些可能的实施方式中,所述平衡装置包括平衡臂、第一质量体和第二质量体,所述第一质量体和所述第二质量体质量相同,所述第一质量体和所述第二质量体分别设置在所述平衡臂的两端。
11、在一些可能的实施方式中,所述平衡臂上设置有齿轮带,所述传动轴上设置有与所述齿轮带对应的齿轮,所述传动轴通过齿轮在所述平衡臂的齿轮带上运动或固定。
12、根据本公开的第二方面,提供一种一端约束的柔性转轴自动抑振系统的控制方法,基于如上所述的系统,所述方法包括:
13、获取柔性转轴的第一振动数据;
14、控制转轴电磁铁与调节盘断开连接,并控制固定模块和所述调节盘吸附连接;
15、控制驱动电机驱动转轴电磁铁转动第一预设角度,以驱动所述横向调节装置,使得所述横向调节装置带动所述平衡装置横向移动;
16、在所述平衡装置横向移动完成后,获取所述柔性转轴的第二振动数据;
17、在所述第一振动数据大于所述第二振动数据的情况下,基于所述第二振动数据通过所述横向调节装置对所述平衡装置进行横向调节;
18、或,
19、在所述第一振动数据大于所述第二振动数据的情况下,基于所述第二振动数据通过轴向调节装置对所述平衡装置进行轴向调节。
20、在一些可能的实施方式中,所述方法还包括:
21、在所述第一振动数据小于或等于所述第二振动数据的情况下,控制所述固定模块和所述调节盘断开连接,并控制所述转轴电磁铁与所述调节盘吸附连接;
22、控制所述驱动电机驱动所述转轴电磁铁基于所述第一方向转动第二预设角度,以驱动所述轴向调节装置,使得所述轴向调节装置带动所述平衡装置沿所述第一方向转动;
23、在所述平衡装置转动完成后,基于所述第二振动数据通过所述横向调节装置对所述平衡装置进行横向调节;
24、或,
25、在所述平衡装置转动完成后,基于所述第二振动数据通过轴向调节装置对所述平衡装置进行转动调节。
26、在一些可能的实施方式中,所述基于所述第二振动数据通过轴向调节装置对所述平衡装置进行轴向调节,包括:
27、控制所述固定模块和所述调节盘断开连接,并控制所述转轴电磁铁和所述调节盘吸附连接;
28、控制所述驱动电机驱动转轴电磁铁基于第一方向转动所述第三预设角度,以驱动所述轴向调节装置,使得所述轴向调节装置带动所述平衡装置沿所述第一方向转动;
29、在所述平衡装置转动完成后,获取所述柔性转轴的第三振动数据;
30、在所述第二振动数据大于所述第三振动数据的情况下,控制所述驱动电机驱动所述转轴电磁铁基于所述第一方向继续转动所述第三预设角度;
31、在所述转轴电磁铁转动完成后,获取所述柔性转轴的第四振动数据;
32、在所述第三振动数据小于或等于所述第四振动数据的情况下,控制所述驱动电机驱动所述转轴电磁铁基于第二方向转动所述第三预设角度,并确定所述平衡装置轴向调节的最终状态,所述第一方向和所述第二方向为相反的方向。
33、在一些可能的实施方式中,所述方法还包括:
34、在所述第三振动数据大于所述第四振动数据的情况下,控制所述驱动电机驱动所述转轴电磁铁基于所述第一方向继续转动所述第三预设角度;
35、在所述转轴电磁铁转动完成后,获取所述柔性转轴的第五振动数据;
36、基于所述第四振动数据更新所述第三振动数据,并基于所述第五振动数据更新所述第四振动数据。
37、在一些可能的实施方式中,所述方法还包括:
38、在所述第二振动数据小于或等于所述第三振动数据的情况下,控制所述驱动电机驱动所述转轴电磁铁基于所述第二方向转动所述第四预设角度,以驱动所述轴向调节装置,使得所述轴向调节装置带动所述平衡装置沿所述第二方向转动,所述第四预设角度为所述第三预设角度的两倍;
39、在所述转轴电磁铁转动完成后,获取所述柔性转轴的第六振动数据;
40、在所述第三振动数据小于或等于所述第六振动数据的情况下,控制所述驱动电机驱动所述转轴电磁铁基于第一方向转动所述第三预设角度,并确定所述平衡装置轴向调节的最终状态。
41、在一些可能的实施方式中,所述方法还包括:
42、在所述第三振动数据大于所述第六振动数据的情况下,控制所述驱动电机驱动所述转轴电磁铁基于所述第二方向继续转动所述第三预设角度;
43、在所述转轴电磁铁转动完成后,获取所述柔性转轴的第七振动数据;
44、基于所述第六振动数据更新所述第三振动数据,并基于所述第七振动数据更新所述第六振动数据。
45、在一些可能的实施方式中,所述基于所述第二振动数据通过所述横向调节装置对所述平衡装置进行横向调节,包括:
46、控制所述转轴电磁铁与所述调节盘断开连接,并控制所述固定模块和所述调节盘吸附连接;
47、控制所述驱动电机驱动转轴电磁铁基于所述第一方向转动所述第一预设角度,以驱动所述横向调节装置,使得所述横向调节装置带动所述平衡装置横向移动;
48、在所述平衡装置横向移动完成后,获取所述柔性转轴的第八振动数据;
49、在所述第二振动数据大于所述第八振动数据的情况下,控制所述驱动电机驱动所述转轴电磁铁基于所述第一方向继续转动所述第一预设角度;
50、在所述转轴电磁铁转动完成后,获取所述柔性转轴的第九振动数据;
51、在所述第八振动数据小于或等于所述第九振动数据的情况下,控制所述驱动电机驱动所述转轴电磁铁基于所述第二方向转动所述第一预设角度,以驱动所述横向调节装置,使得所述横向调节装置带动所述平衡装置横向移动,并确定所述平衡装置的横向调节的最终状态。
52、在一些可能的实施方式中,所述方法还包括:
53、在所述第八振动数据大于所述第九振动数据的情况下,控制所述驱动电机驱动所述转轴电磁铁基于所述第一方向继续转动所述第一预设角度;
54、在所述转轴电磁铁转动完成后,获取所述柔性转轴的第十振动数据;
55、基于所述第九振动数据更新所述第八振动数据,并基于所述第十振动数据更新所述第九振动数据。
56、在一些可能的实施方式中,所述方法还包括:
57、在所述第二振动数据小于或等于所述第八振动数据的情况下,控制所述驱动电机驱动所述转轴电磁铁基于所述第二方向转动所述第五预设角度,所述第五预设角度为所述第一预设角度的两倍;
58、在所述转轴电磁铁转动完成后,获取所述柔性转轴的第十一振动数据;
59、在所述第八振动数据小于或等于所述第十一振动数据的情况下,控制所述驱动电机驱动所述转轴电磁铁基于第一方向转动所述第一预设角度,并确定所述平衡装置横向调节的最终状态。
60、在一些可能的实施方式中,所述方法还包括:
61、在所述第八振动数据大于所述第十一振动数据的情况下,控制所述驱动电机驱动所述转轴电磁铁基于所述第二方向继续转动所述第一预设角度;
62、在所述转轴电磁铁转动完成后,获取所述柔性转轴的第十二振动数据;
63、基于所述第十一振动数据更新所述第八振动数据,并基于所述第十二振动数据更新所述第十一振动数据。
64、根据本公开的第三方面,提供一种一端约束的柔性转轴自动抑振系统的控制装置,其特征在于,应用于如上所述的系统,所述装置包括:
65、第一振动数据获取模块,用于在平衡装置处于初始位置时获取柔性转轴的第一振动数据,所述初始位置为所述平衡装置的第一质量体和第二质量体基于平衡臂中心对称;
66、第一连接控制模块,用于控制转轴电磁铁与调节盘断开连接,并控制固定模块和所述调节盘吸附连接;
67、第一转动控制模块,用于控制驱动电机驱动转轴电磁铁转动第一预设角度,以驱动所述横向调节装置,使得所述横向调节装置带动所述平衡装置横向移动;
68、第二振动数据获取模块,用于在所述平衡装置横向移动完成后,获取所述柔性转轴的第二振动数据;
69、横向调节模块,用于在所述第一振动数据大于所述第二振动数据的情况下,基于所述第二振动数据通过所述横向调节装置对所述平衡装置进行横向调节;
70、或,
71、轴向调节模块,用于在所述第一振动数据大于所述第二振动数据的情况下,基于所述第二振动数据通过轴向调节装置对所述平衡装置进行轴向调节。
72、根据本公开的第四方面,提供了一种电子设备,包括至少一个处理器,以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述至少一个处理器通过执行所述存储器存储的指令实现如第一方面中任意一项所述的一端约束的柔性转轴自动抑振系统的控制方法。
73、根据本公开的第五方面,提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一条指令或至少一段程序,所述至少一条指令或至少一段程序由处理器加载并执行以实现如第一方面中任意一项所述的一端约束的柔性转轴自动抑振系统的控制方法。
74、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本公开。
75、实施本公开,具有以下有益效果:
76、在调节盘没有被吸附在转轴电磁铁上的情况下,通过驱动电机驱动横向调节装置,以使得横向调节装置带动平衡装置横向移动;通过调节平衡装置横向的重心,找到横向最佳位置,与柔性转轴转动过程中的偏心力进行部分抵消,减少振动。在调节盘被吸附在转轴电磁铁上的情况下,通过驱动电机驱动轴向调节装置,以使得轴向调节装置带动平衡装置轴向转动。通过调节平衡装置转动过程的重心,找到最佳位置,与柔性转轴转动过程中的偏心力进行部分抵消,进一步减少振动。在横向调节装置和轴向调节装置的共同调节下,确定平衡装置抵消偏心力的最优位置,实现振动最小化控制,减少柔性转轴所在的系统因振动产生的噪音,增加系统的稳定性。
77、根据下面参考附图对示例性实施例的详细说明,本公开的其它特征及方面将变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!