一种图像识别装置及识别方法与流程
本技术涉及图像识别,尤其是涉及一种图像识别装置及识别方法。
背景技术:
1、图像识别,是指利用计算机对图像进行处理、分析和理解,以识别各种不同模式的目标和对象的技术,是应用深度学习算法的一种实践应用,现阶段图像识别技术一般分为人脸识别与商品识别,人脸识别主要运用在安全检查、身份核验与移动支付中,商品识别主要运用在商品流通过程中,特别是无人货架、智能零售柜等无人零售领域。
2、人脸识别,是基于人的脸部特征信息进行身份识别的一种生物识别技术。通过利用图像识别装置,如摄像机,采集含有人脸的图像或视频流,并自动在图像中跟踪和检测人脸特征,进而对检测到的人脸进行脸部的一系列相关技术,通常也叫做人像识别、面部识别。
3、目前现有的图像识别装置有以下缺点:现有的图像识别装置在使用时,只能够对固定视角内的图像进行识别,不能够自由调节横向位置进行图像识别,降低了图像识别的准确度,不方便使用者使用。
技术实现思路
1、为了能够调节图像识别装置的横向位置,提高图像的识别准确度,本技术提供一种图像识别装置及识别方法。
2、本技术提供的一种图像识别装置采用如下的技术方案:
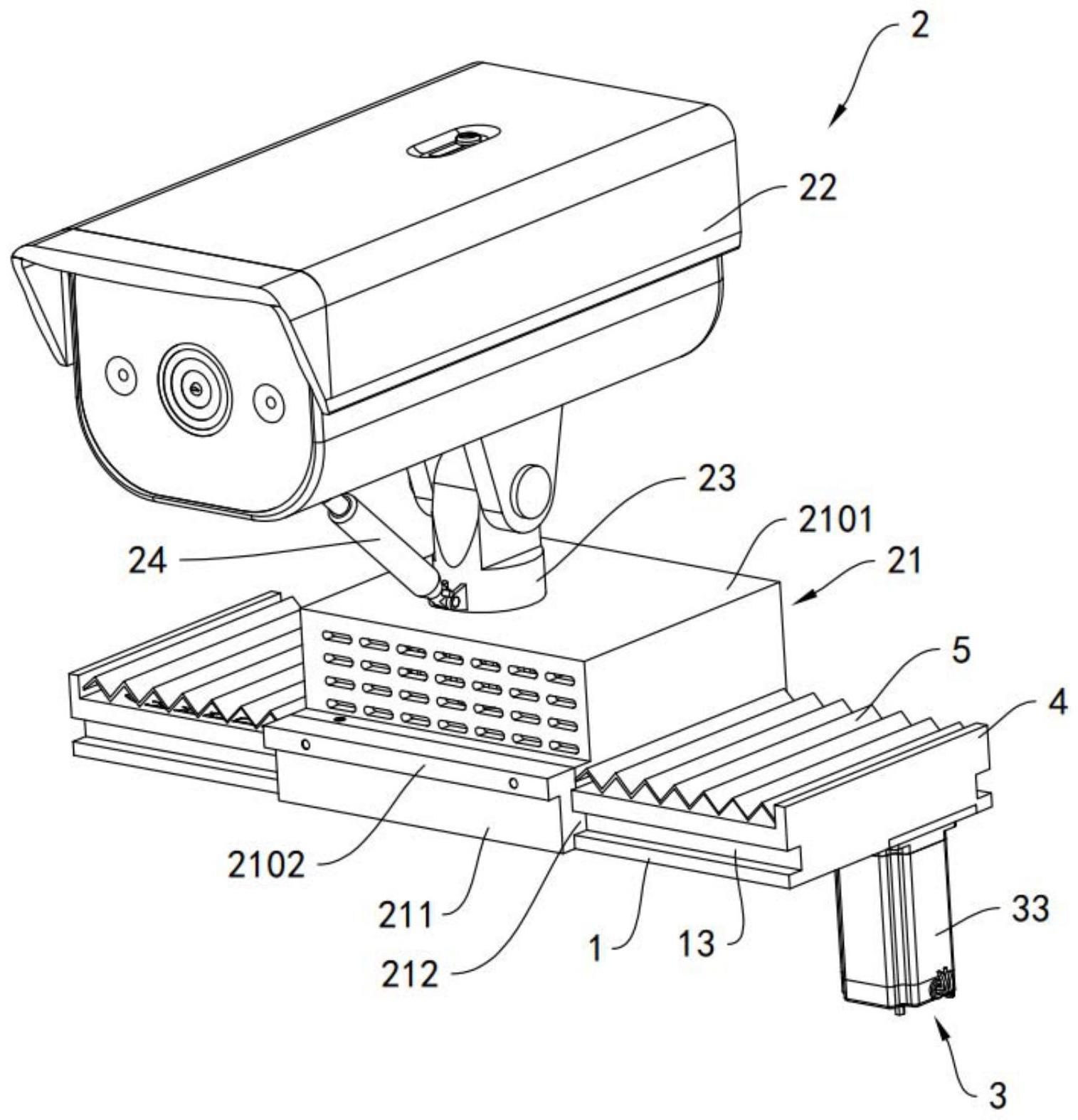
3、一种图像识别装置,包括有安装底座以及摄像单元;
4、所述摄像单元能够在所述安装底座上进行横向位置的移动;
5、所述安装底座的顶端表面开设有轨迹槽;
6、所述安装底座上设置有滑动连接在所述轨迹槽内部的驱动链条,所述安装底座上还设置有驱动电机,所述驱动电机的电机轴上设置有驱动链轮,所述驱动链轮与所述驱动链条相啮合;
7、所述驱动链条的长度相较所述轨迹槽的长度小;
8、所述摄像单元与所述驱动链条固定相连。
9、通过采用上述技术方案,当需要调节摄像单元的位置时,启动驱动电机,通过驱动电机带动驱动链轮进行转动,由于驱动链轮与驱动链条之间啮合,当驱动链轮发生转动的时候,能够带动驱动链条在轨迹槽的内部进行移动。当驱动链条沿着轨迹槽进行移动的时候,能够拉动摄像单元在安装底座上进行横向方向的移动,从而来调节摄像单元的位置,使摄像单元能够与待识别的图像处于相对的状态,以此来提高摄像单元识别图像的准确度。
10、可选的,所述摄像单元包括有滑动连接在所述安装底座上的滑移座以及位于滑移座上方的摄像头;
11、所述滑移座的上表面设置有竖向设置的转动轴,所述转动轴转动连接在所述滑移座上,所述摄像头铰接在所述转动轴的顶端,所述摄像头与所述转动轴之间设置有伸缩推拉装置,所述伸缩推拉装置一端与所述摄像头相铰接,所述伸缩推拉装置的另一端与所述转动轴相铰接,通过所述伸缩推拉装置长度的变化从而调节摄像头的俯仰角度;
12、所述滑移座上设置有带动所述转动轴进行转动的控制机构,通过所述控制机构从而控制转动轴转动从而调节摄像头的横向转动角度。
13、通过采用上述技术方案,通过控制机构来调节摄像头的横向转动角度,同时配合伸缩推拉装置来调节摄像头的俯仰角度,当摄像头在识别图像的时候,能够调节摄像头与待识别图像的相对位置,使摄像头能够与待识别图像处于正对的状态,以此进一步提高图像识别装置识别的准确度。
14、可选的,所述控制机构包括有固定在所述转动轴上的蜗轮,回转连接在所述滑移座上的蜗杆以及位于所述蜗杆其中一端的控制电机,所述控制电机用于带动所述蜗杆转动,所述蜗杆与所述蜗轮相啮合。
15、通过采用上述技术方案,通过采用蜗轮以及蜗杆,能够在调节摄像头横向转动角度的时候更加准确,且在摄像头的横向转动角度调节完毕后,摄像头的横向转动角度不易收到外界环境的影响从而出现横向转动角度发生变化的情况。
16、可选的,所述滑移座的内部设置有空腔,所述蜗轮、蜗杆以及控制电机均位于所述空腔内,所述空腔的腔壁上开设有散热孔。
17、通过采用上述技术方案,将蜗轮、蜗杆以及控制电机隐藏在空腔的内部,能够对蜗轮、蜗杆以及控制电机进行保护,同时通过散热孔能够将控制电机运转过程中的热量尽快的从空腔内排出,使空腔内的温度能够快速的降低,减少空腔内的温度对于控制电机的影响。
18、可选的,所述安装底座其中相对的一组侧壁上开设有滑槽;所述摄像单元的底端设置有与安装底座上开设有滑槽的侧壁面相贴合的延伸部,所述延伸部朝向所述安装底座的一侧设置有伸入到滑槽内部的卡接部。
19、通过采用上述技术方案,通过使卡接部卡入到滑槽的内部,从而使滑移座不易从安装底座上脱离,保证滑移座与安装底座之间连接的稳定性。
20、可选的,所述滑移座包括第一主体和第二主体,所述第一主体和第二主体并排设置;两个延伸部,其中一个延伸部位于所述第一主体上,另一个位于所述第二主体上,所述第一主体和第二主体之间设置有调节第一主体和第二主体之间相对位置的调节机构。
21、通过采用上述技术方案,便于将滑移座从安装底座上拆卸下来,当需要将滑移座从安装底座上拆卸下来的时候,通过调节机构首先使第一主体和第二主体之间逐渐分开,直至两个卡接部之间的距离能够使卡接部从安装底座上的滑槽中脱离,当卡接部能够从滑槽内脱离后,即可将滑移座从安装底座上拆卸下来。当需要将滑移座安装到安装底座上的时候,首先使两个卡接部之间的距离大于安装底座的宽度,然后将卡接部与滑槽处于相对的状态,然后控制第一主体和第二主体靠近,直至两个卡接部分别卡入到安装底座上的卡槽内,从而将滑移座安装到安装底座上。
22、可选的,所述调节机构包括有相互平行的导向杆和调节螺杆,所述导向杆一端与所述第一主体固定,所述导向杆与所述第二主体之间滑动相连;
23、所述调节螺杆与所述第一主体转动相连,所述调节螺杆与所述第二主体螺纹相连;
24、所述第一主体的内部设置有竖向设置的调节转动杆,所述调节转动杆的顶端自第一主体的顶端表面露出,所述调节转动杆与所述调节螺杆之间通过相互啮合的两个锥齿轮相连,所述调节转动杆转动时,通过两个锥齿轮的配合从而带动所述调节螺杆转动。
25、通过采用上述技术方案,当需要控制第一主体和第二主体分开或靠近的时候,只需要控制调节转动杆进行转动,即可控制第一主体和第二主体靠近或分离,其具有结构简单、操作方便的优点。
26、可选的,所述安装底座位于摄像单元移动方向上的两端分别设置有挡条,所述挡条与所述摄像单元之间设置有伸缩板,所述伸缩板将所述轨迹槽遮盖在下方,所述伸缩板一端与所述挡条固定,所述伸缩板的另一端与所述摄像单元固定。
27、通过采用上述技术方案,伸缩板将驱动链条以及驱动链轮隐藏到下方,避免外界环境中的杂物进入到轨迹槽内,从而降低驱动链条以及驱动链轮因异物从而出现卡滞的情况。
28、可选的,所述轨迹槽包括有直线段以及位于直线段两端的弯曲段,所述弯曲段一端与所述直线段连通,所述弯曲段的另一端向直线段的中心所在位置延伸。
29、通过采用上述技术方案,在直线段的两端设置弯曲段,能够缩短轨迹槽所占用的长度,能够尽可能的缩短安装底座的长度,达到节省成本的目的。
30、本技术提供的一种图像识别方法采用如下的技术方案:
31、一种图像识别方法,其采用了所述的图像识别装置,包括如下步骤:
32、当摄像单元识别到图像的时候,首先通过驱动机构带动摄像单元在安装底座上进行移动,使摄像单元能够与所识别的图像处于正对的状态;
33、然后通过伸缩推拉装置来控制摄像头进行俯仰角度的调节;
34、同时通过控制机构来调节摄像头的横向角度,使摄像头能够与所识别的图像处于正对的状态。
35、通过采用上述技术方案,当需要调节摄像单元的位置时,启动驱动电机,通过驱动电机带动驱动链轮进行转动,由于驱动链轮与驱动链条之间啮合,当驱动链轮发生转动的时候,能够带动驱动链条在轨迹槽的内部进行移动。当驱动链条沿着轨迹槽进行移动的时候,能够拉动摄像单元在安装底座上进行横向方向的移动,从而来调节摄像单元的位置,使摄像单元能够与待识别的图像处于相对的状态,以此来提高摄像单元识别图像的准确度。
36、通过控制机构来调节摄像头的横向转动角度,同时配合伸缩推拉装置来调节摄像头的俯仰角度,当摄像头在识别图像的时候,能够调节摄像头与待识别图像的相对位置,使摄像头能够与待识别图像处于正对的状态,以此进一步提高图像识别装置识别的准确度。
37、综上所述,本技术包括以下至少一种有益技术效果:
38、1.当需要调节摄像单元的位置时,启动驱动电机,通过驱动电机带动驱动链轮进行转动,由于驱动链轮与驱动链条之间啮合,当驱动链轮发生转动的时候,能够带动驱动链条在轨迹槽的内部进行移动。当驱动链条沿着轨迹槽进行移动的时候,能够拉动摄像单元在安装底座上进行横向方向的移动,从而来调节摄像单元的位置,使摄像单元能够与待识别的图像处于相对的状态,以此来提高摄像单元识别图像的准确度。
39、2.伸缩推拉装置来调节摄像头的俯仰角度,当摄像头在识别图像的时候,能够调节摄像头与待识别图像的相对位置,使摄像头能够与待识别图像处于正对的状态,以此进一步提高图像识别装置识别的准确度。
- 还没有人留言评论。精彩留言会获得点赞!