一种操纵室主动减振降噪方法、系统及起重机与流程
本发明涉及工程机械,具体涉及一种操纵室主动减振降噪方法、系统及起重机。
背景技术:
1、随着工程机械的发展,起重机广泛应用于工程建设中,起重机上车作业时往往伴随着大量的振动冲击;驾驶员长期工作在操纵室中,操纵室的减振降噪效果,直接关系到驾驶员的乘坐舒适性;随着起重机技术不断发展,人们对操纵室舒适性要求不断提高。
2、上车作业时,操纵室内的振动主要由发动机、泵、阀、马达等激励源通过结构连接件传递到操纵室内;操纵室内噪声主要是由噪声激励源空气传播和操纵室结构振动辐射产生,且操纵室内主要存在的中低频的噪声。目前起重机操纵室主要采取以下减振降噪措施:一种是在操纵室与转台底板之间安装弹性减振机构,有效地隔离操纵室的中高频振动;另一种是操纵室内粘贴吸隔声材料,有效降低操纵室的中高频噪声;吸隔声材料通常采用传统的阻尼结构,将结构振动能或声能,通过阻尼材料的内摩擦等机制转变成热能而被吸收,使振动能或声能减少;以上措施均无法有效抑制操纵室内中低频的振动噪声,特别是弹性板对声腔的中低频辐射噪声。然而起重机操纵室内主要存在1000hz以下的低频噪声,低频噪声具有穿透能力强、传播距离远、难以阻隔等特点,现有操纵室内无中低频噪声的减振降噪措施及方法,传统的隔声结构仅能较好地隔离噪声中的中高频噪音。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种操纵室主动减振降噪方法、系统及起重机,能够有效抑制薄板件对声腔的中低频辐射噪声,提高操纵室的舒适度。
2、为达到上述目的,本发明是采用下述技术方案实现的:
3、第一方面,本发明提供了一种操纵室主动减振降噪方法,所述方法包括:
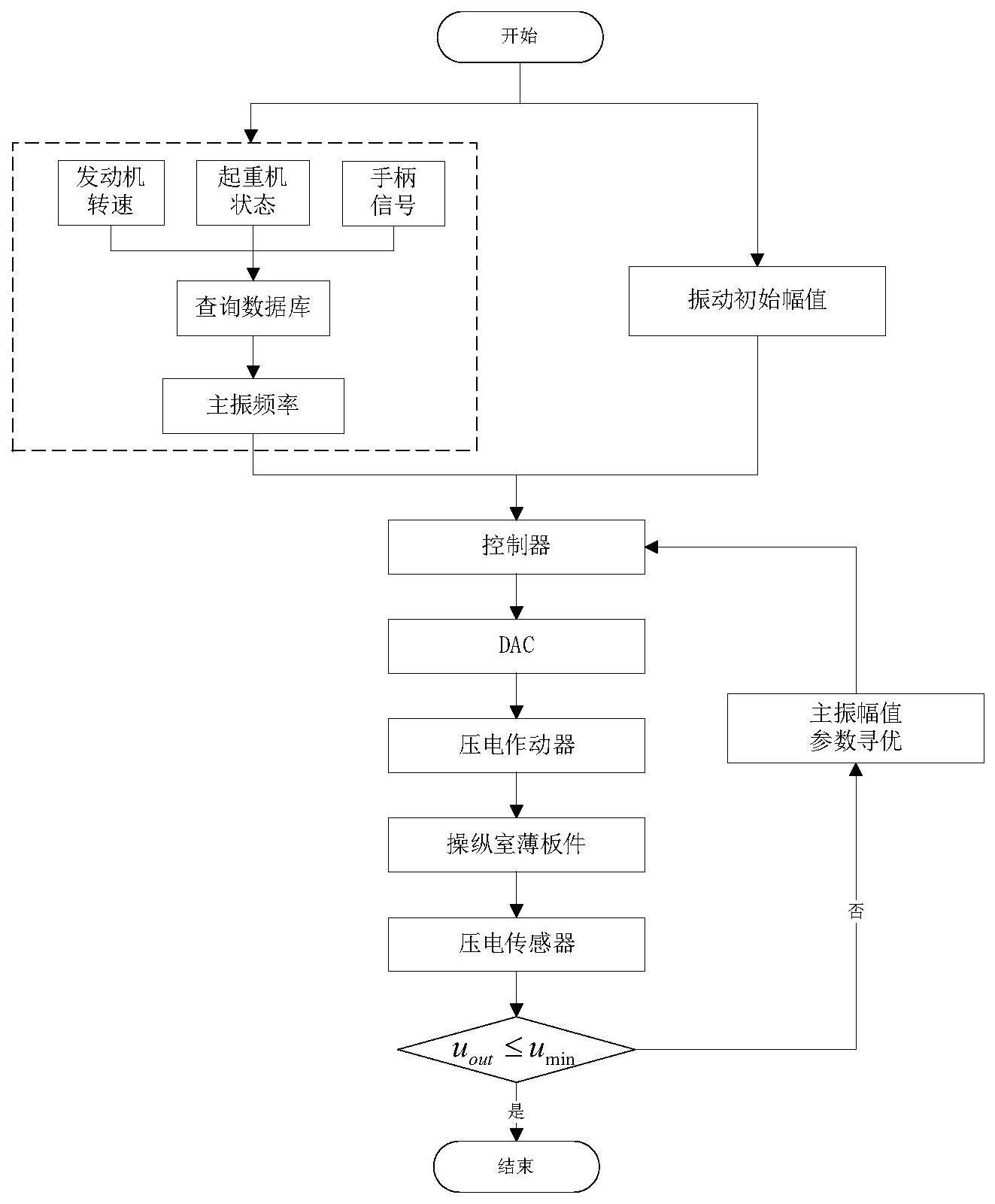
4、获取操纵室的主振动频率,以及对应振动频率设定范围;
5、判断当前主振动频率是否位于设定范围内;
6、响应于当前主振动频率不在设定范围内,获取产生该主振动频率对应的被控薄板件上的压电传感器反馈的正压电信号;
7、根据当前的主振动频率及正压电信号,动态调整给压电作动器的指令参数,以对所述被控薄板件的振动进行抑制,直至调节至该被控薄板件的主振动频率位于设定范围内;
8、其中,所述压电作动器和压电传感器分别设置在所述被控薄板件的两侧。
9、结合第一方面,可选的,所述动态调整给压电作动器的指令参数,以对所述被控薄板件的振动进行抑制的步骤包括:
10、结合当前的主振动频率、压电作动器初始幅值和相位的初始控制参数对压电作动器发出指令,使压电作动器产生抑制所述被控薄板件振动的反向振动;
11、响应于压电传感器当前反相振动输出的电压uout大于最小预设电压umin时,对压电作动器的主振幅值和相位控制参数进行寻优,直至找到最优主振幅值和相位控制参数,使得压电作动器产生抑制被控薄板件振动的最理想反向振动,直至调节至压电传感器输出电压uout≤最小预设电压umin。
12、结合第一方面,可选的,所述对压电作动器的主振幅值和相位控制参数进行寻优采用的算法为fxlms控制算法。
13、结合第一方面,可选的,所述fxlms控制算法包括:
14、根据所获取的主振动频率ωi,确定需控制谐波阶数i,并初始化控制输入的谐波信号fcm(0):
15、
16、式中,和ymi(0)分别为第m个控制输入的第i阶谐波的余弦和正弦系数在初始时刻的值,0表示初始时刻;
17、根据当前时域控制输入的谐波信号作为压电作动器控制输入驱动结构,获得压电传感器在当前时刻n控制点处采集到的控制误差响应信号,其表达式为:
18、
19、式中,el(n)表示第l个响应控制点的误差响应信号,l=1,2,…,l;l为相应控制点的个数;dl(n)表示激励源对第l个响应控制点的振动响应,yl(n)为第l个响应控制点在当前时刻n的作动响应,hlm(n)表示第m个压电作动器输出主动控制力传递至被控薄板件第l个响应控制点的传递通道,m=1,2,…,m;m为压电作动器的总数;fcm(n)表示第m个压电作动器在当前时刻n输入的谐波信号;
20、根据控制误差响应信号的采样值,更新前馈控制输入谐波系数,以获得前馈控制输入谐波信号的最优值。
21、结合第一方面,可选的,所述根据控制误差响应信号的采样值,更新前馈控制输入谐波系数,以获得前馈控制输入谐波信号的最优值的步骤包括:
22、采用最陡梯度lms算法更新前馈控制输入谐波系数w(n),其更新公式为:
23、
24、式中,w(n+1)和w(n)分别表示n+1时刻和n时刻的前馈控制输入谐波系数;μ为收敛步长;g(n)为前馈控制输入谐波系数的梯度;e(n)为控制误差响应信号的采样值,e(n)={e1(n),e2(n),…,el(n)};为参考信号,x(n)为n时刻的振动激励,h(n)表示次级通道传递函数的估计值;
25、根据更新得到的前馈控制输入谐波系数和该时刻的谐波基函数采样值,得到当前时刻的前馈控制输入谐波信号fclms(n),其表达式如下:
26、
27、式中,wi(n)表示第i阶谐波的系数,x(n-i+1)表示n时刻在第i阶谐波影响下的振动激励,t表示转置。
28、第二方面,本发明提供了一种操纵室主动减振降噪系统,所述系统包括压电作动器、压电传感器和控制器;
29、所述控制器分别与压电作动器和压电传感器电连接,用于第一方面任一项所述的操纵室主动减振降噪方法的步骤。
30、结合第二方面,可选的,所述压电传感器内的压电片设置为pzt压电陶瓷片;所述压电作动器内的压电片设置为pvdf压电聚合物。
31、结合第二方面,可选的,所述压电作动器和压电传感器分别安装在操纵室被控薄板件的两侧,其安装位置为对应操纵室主模态应变最大的位置。
32、结合第二方面,可选的,所述系统还包括dac数模转换器;所述控制器通过dac数模转换器与压电传感器电连接。
33、第三方面,本发明还提供了一种起重机,包括第二方面任一所述的操纵室主动减振降噪系统。
34、与现有技术相比,本发明所达到的有益效果:
35、具备结构简单、减振效果好的优势
36、1、本发明提供的主动减振降噪方法,通过设置在被控薄板件两侧的压电作动器和压电传感器,利用压电智能材料的正逆压电效应,根据车辆当前工作状态及压电传感器的正压电效应振动产生的电能进行动态调整压电作动器的输入参数,使得压电作动器产生逆压电效应来抑制被控薄板件振动,对不同工况的振动进行最优的减振,有效抑制了被控薄板件对声腔的中低频辐射噪声,提高了操纵室舒适度。
37、2.本发明提供的主动减振降噪系统具有反应迅速,结构简单、轻质可靠、成本低、可有效抑制操纵室中低频振动噪声等特点。
38、3.本发明可根据操纵室模态仿真分析确定压电传感器及压电作动器的位置,有效进行多阶模态低频抑振,降低操纵室声腔模态共振异响风险。
- 还没有人留言评论。精彩留言会获得点赞!